TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024110045
公報種別
公開特許公報(A)
公開日
2024-08-15
出願番号
2023014365
出願日
2023-02-02
発明の名称
治具配置システム
出願人
株式会社SUBARU
代理人
個人
,
個人
主分類
B23P
19/00 20060101AFI20240807BHJP(工作機械;他に分類されない金属加工)
要約
【課題】組立部品に応じて組立治具を好適に配置する。
【解決手段】治具配置システムは、ベース上に配置可能なロケータを把持するロボットアームと、ロボットアームの動作を制御する制御部と、を備えている。制御部は、ワークに対応する少なくとも1つのロケータを順次選択してロボットアームにより把持し、ワークの形状に応じて当該ロケータの位置及び姿勢を調整し、当該ロケータをベース上に配置する。
【選択図】図6
特許請求の範囲
【請求項1】
組立台上に配置可能な組立治具を把持するロボットアームと、
前記ロボットアームの動作を制御する制御部と、
を備え、
前記制御部は、
組立部品に対応する少なくとも1つの前記組立治具を順次選択して前記ロボットアームにより把持し、
前記組立部品の形状に応じて当該組立治具の位置及び姿勢を調整し、当該組立治具を前記組立台上に配置する、
治具配置システム。
続きを表示(約 450 文字)
【請求項2】
前記組立治具と前記組立台とは、互いのピンと孔部とを嵌合方向に嵌合させて、当該組立治具が当該組立台上に配置され、
前記ロボットアームは、
前記組立治具を把持する把持部と、
前記組立治具を前記組立台上に配置するときに前記嵌合方向と直交する面内で前記把持部が移動可能なように当該把持部を支持する移動機構と、
を有する、
請求項1に記載の治具配置システム。
【請求項3】
前記ロボットアームは、前記組立治具を把持する把持部が、弾性部材で構成されている、
請求項1に記載の治具配置システム。
【請求項4】
前記ロボットアームは、前記組立治具を把持する把持部と、前記把持部を振動させる加振装置とを有し、
前記制御部は、前記組立治具と前記組立台とを互いのピンと孔部とを嵌合させて当該組立治具を当該組立台上に配置するときに、前記加振装置により前記把持部を振動させる、
請求項1に記載の治具配置システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、組立治具を組立台上に配置する治具配置システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
航空機には、類似する形状の複数の組立部品が使用される。これらの複数の組立部品に対しては、位置決めや固定等のための組立治具を用い、打鋲による部品の結合や基準孔の穿孔等を行うサブ組立が個別に行われる。複数の組立部品は互いに似てはいても異なる形状であるため、組立部品の種類ごとに専用の組立治具を製作すると治具製作費が嵩む。
【0003】
そこで、例えば特許文献1では、組立部品の形状に対応させて、基台に対して面板等の位置を調整可能な組立治具が提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2005-153094号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の技術では、組立部品に応じた組立治具の調整作業を作業員(人間)が行う必要がある。そのため、この調整作業に要する段取り工数が必要となるうえに、ヒューマンエラーが生じるおそれもある。
【0006】
本発明は、組立部品に応じて組立治具を好適に配置することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の一実施の形態は、治具配置システムであって、
組立台上に配置可能な組立治具を把持するロボットアームと、
前記ロボットアームの動作を制御する制御部と、
を備え、
前記制御部は、
組立部品に対応する少なくとも1つの前記組立治具を順次選択して前記ロボットアームにより把持し、
前記組立部品の形状に応じて当該組立治具の位置及び姿勢を調整し、当該組立治具を前記組立台上に配置する。
【発明の効果】
【0008】
本発明によれば、組立部品に応じて組立治具を好適に配置することができる。
【図面の簡単な説明】
【0009】
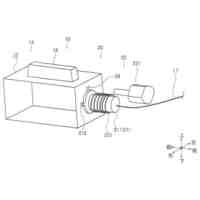
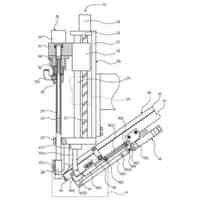
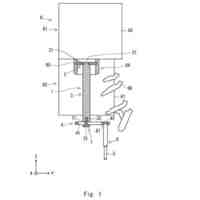
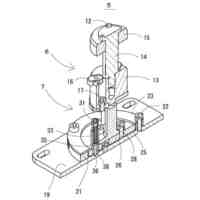
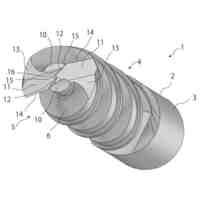
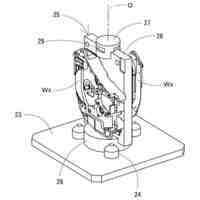
実施形態に係る治具配置システムの要部を示す斜視図である。
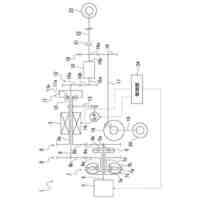
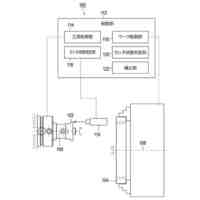
実施形態に係る治具配置システムの概略構成を示すブロック図である。
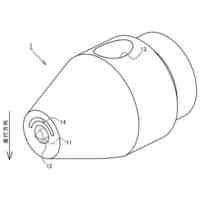
実施形態に係るロケータの斜視図である。
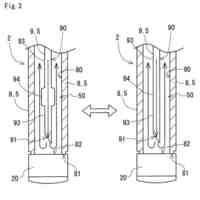
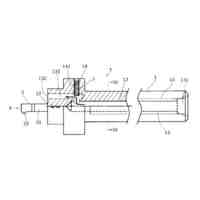
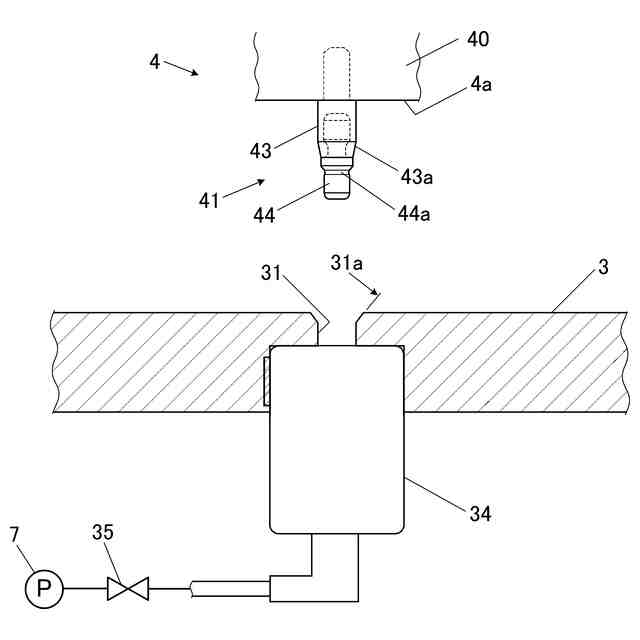
実施形態に係るロケータの固定用ピン及び把持用ピンの側面図である。
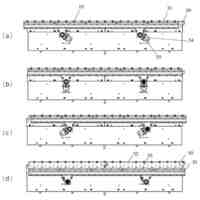
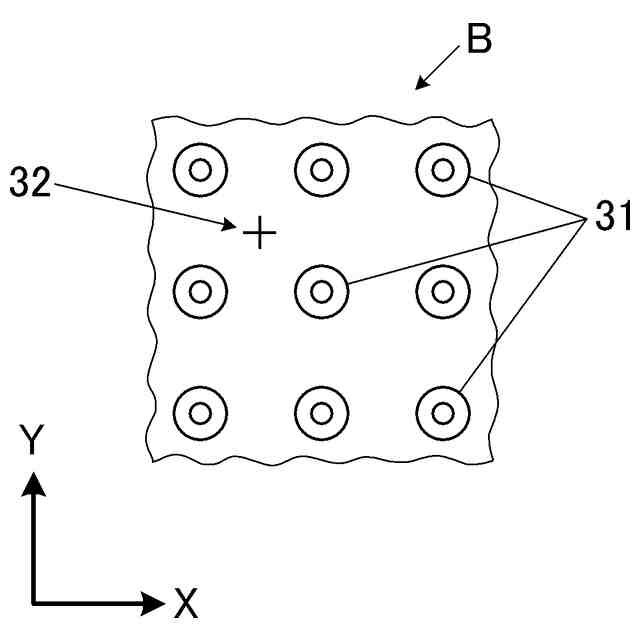
実施形態に係るベースの平面図である。
実施形態に係るベースに形成された1区画分の孔部の拡大図である。
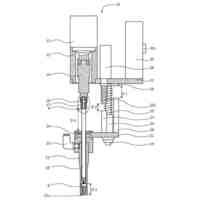
実施形態に係るロケータの固定用ピンとベースの孔部との嵌合について説明するための図である。
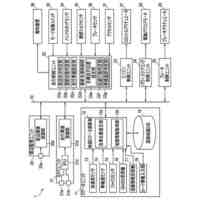
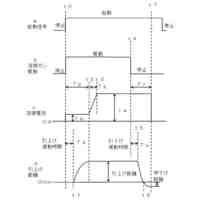
実施形態に係る治具配置処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について、図面を参照して説明する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社SUBARU
車両
今日
株式会社SUBARU
シート
7日前
株式会社SUBARU
車両ドア解錠装置
6日前
株式会社SUBARU
透明部材破壊構造
6日前
株式会社SUBARU
透明部材破壊構造
6日前
株式会社SUBARU
歯車研削用ねじ状砥石のドレッシング方法
6日前
株式会社SUBARU
運転支援装置
6日前
個人
作業用治具
2か月前
個人
トーチノズル
2か月前
日東精工株式会社
検査装置
2か月前
日東精工株式会社
ねじ締め機
3か月前
個人
コンタクトチップ
3か月前
日東精工株式会社
ねじ締め機
3か月前
シヤチハタ株式会社
組立ライン
2か月前
日東精工株式会社
組み付け装置
2か月前
トヨタ自動車株式会社
治具
3か月前
有限会社津谷工業
切削工具
1か月前
エンシュウ株式会社
工作機械
2か月前
株式会社不二越
タップ
1か月前
株式会社ダイヘン
スタッド溶接電源
3か月前
株式会社ダイヘン
インチング制御方法
3か月前
トヨタ自動車株式会社
積層コア
7日前
株式会社FUJI
ワーク置き台
3か月前
ダイハツ工業株式会社
冷却構造
2か月前
株式会社ダイヘン
アーク溶接制御方法
1か月前
ブラザー工業株式会社
工作機械
3か月前
株式会社不二越
歯車加工機
1か月前
旭精工株式会社
シャフトブレーキ
3か月前
光精工株式会社
クーラントタンク
3か月前
株式会社不二越
歯車研削盤
1か月前
株式会社メドメタレックス
ドリル
6日前
株式会社浪速試錐工業所
防風カバー
1か月前
住友重機械工業株式会社
レーザ装置
1か月前
株式会社ダイヘン
アークスタート制御方法
3か月前
株式会社メタルクリエイト
切削装置
2か月前
株式会社FUJI
自動化用パレット
22日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ