TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024100930
公報種別
公開特許公報(A)
公開日
2024-07-26
出願番号
2024083461,2020163623
出願日
2024-05-22,2020-09-29
発明の名称
自動均しシステム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
3/43 20060101AFI20240719BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械を自動制御することで、均し対象物の高さに応じた適切な高さで均し対象物を均し、均し対象物を崩れにくくする。
【解決手段】コントローラ50は、均し範囲Aを設定し、均し対象物Sを先端アタッチメント25cで均す均し動作を、均し範囲Aで自動的に行うように作業機械20を制御する。コントローラ50は、撮像装置41に検出された容器5の三次元情報に基づいて均し範囲Aを設定する。コントローラ50は、高さ検出部43に検出された均し対象物Sの高さHに基づいて設定した高さで均し動作が行われるように、高さ検出部43に検出された均し対象物Sの高さHに基づいて、均し範囲Aの高さ方向における位置を設定する。
【選択図】図1
特許請求の範囲
【請求項1】
容器に収容された均し対象物を均す作業機械と、
前記均し対象物および前記容器の少なくともいずれかの、位置および形状の三次元情報を検出する撮像装置と、
前記均し対象物の高さを検出する高さ検出部と、
コントローラと、
を備え、
前記作業機械は、
上部旋回体と、
前記上部旋回体に起伏可能に取り付けられるアタッチメントと、
を備え、
前記アタッチメントは、前記アタッチメントの先端部に設けられる先端アタッチメントを備え、
前記コントローラは、均し範囲を設定し、前記均し対象物を前記先端アタッチメントで均す均し動作を、前記均し範囲で自動的に行うように前記作業機械を制御し、
前記コントローラは、前記撮像装置に検出された前記容器の前記三次元情報に基づいて前記均し範囲を設定し、
前記コントローラは、前記高さ検出部に検出された前記均し対象物の高さに基づいて設定した高さで前記均し動作が行われるように、前記高さ検出部に検出された前記均し対象物の高さに基づいて、前記均し範囲の高さ方向における位置を設定する、
自動均しシステム。
続きを表示(約 97 文字)
【請求項2】
請求項1に記載の自動均しシステムであって、
前記撮像装置は、前記作業機械の外部であって前記作業機械から離れた位置に設けられる、
自動均しシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、均し動作を作業機械に自動的に行わせる自動均しシステムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
例えば特許文献1に記載の技術では、作業機械が、自動運転により土石に関する作業を行う。
【先行技術文献】
【特許文献】
【0003】
特開2000-64359号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
同文献の図2、図7に記載のように、土石は、山形状で配置される場合がある。例えば、この土石は、山形状で地面に置かれる場合や、山形状で容器(同文献ではベッセル)に積み込まれる場合などがある。山形状で配置された土石(均し対象物)は、崩れる場合がある。また、山形状で配置されたものが土石以外の場合も、同様の課題が生じ得る。
【0005】
そこで、本発明は、作業機械を自動制御することで、均し対象物を崩れにくくすることができる、自動均しシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
自動均しシステムは、均し対象物を均す作業機械と、撮像装置と、コントローラと、を備える。前記撮像装置は、前記均し対象物および前記均し対象物の周辺物の少なくともいずれかの、位置および形状の三次元情報を検出する。前記作業機械は、上部旋回体と、前記上部旋回体に起伏可能に取り付けられるアタッチメントと、を備える。前記アタッチメントは、前記アタッチメントの先端部に設けられる先端アタッチメントを備える。前記コントローラは、前記撮像装置に検出された前記三次元情報に基づいて均し範囲を設定し、前記均し対象物を前記先端アタッチメントで均す均し動作を、前記均し範囲で自動的に行うように前記作業機械を制御する。
【発明の効果】
【0007】
上記構成により、作業機械を自動制御することで、均し対象物を崩れにくくすることができる。
【図面の簡単な説明】
【0008】
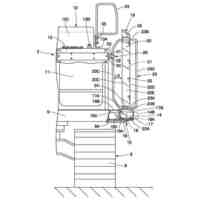
自動均しシステム10などを示す図であり、運搬車2および作業機械20を横から見た図である。
図1に示す運搬車2および作業機械20を上から見た図である。
図1に示す自動均しシステム10のブロック図である。
図2に示す上部旋回体23の旋回動作とアタッチメント25の均し動作とが交互に行われる場合の均し範囲Aなどを示す図2相当図である。
図2に示す上部旋回体23の旋回角度を算出するための角θなどを示す図である。
図1相当図であり、作業機械20に対して容器5が傾斜している場合を示す図である。
【発明を実施するための形態】
【0009】
図1~図6を参照して、図1に示す運搬車2および自動均しシステム10について説明する。
【0010】
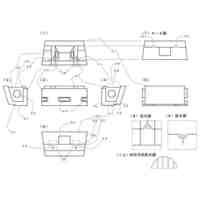
運搬車2は、容器5を備える車両である。運搬車2は、作業機械20によって積み込まれた均し対象物Sを輸送するための車両である。運搬車2は、ダンプカーでもよく、トラックでもよい。運搬車2は、運搬車本体部3と、容器5と、を備える。運搬車本体部3は、走行可能であり、容器5を支持する。運搬車本体部3は、運搬車運転室3aを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日鉄建材株式会社
土砂捕捉柵
7日前
日鉄建材株式会社
土砂捕捉柵
7日前
大和ハウス工業株式会社
バケット
7日前
株式会社パルパルス
抜け止め装置
9日前
日本ソリッド株式会社
防舷材の保護方法
1日前
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
9日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
建設機械
8日前
株式会社テノックス
共回り監視装置
3日前
株式会社西原鉄工所
コンクリートブロック
3日前
西部電機株式会社
水門開閉装置
今日
株式会社テノックス
深層混合処理工法
3日前
株式会社日立建機ティエラ
作業機械
7日前
炎重工株式会社
桟橋及び移動体システム
7日前
株式会社日立建機ティエラ
建設機械
7日前
日立建機株式会社
建設機械
8日前
日立建機株式会社
建設機械
8日前
日立建機株式会社
建設機械
8日前
コベルコ建機株式会社
作業機械の制御装置
8日前
C技研株式会社
切削装置
3日前
鹿島建設株式会社
運搬機構および管体の搬送方法
1日前
ヤンマーホールディングス株式会社
建設機械
8日前
日鉄建材株式会社
梁部材の取付構造及び土砂捕捉柵
7日前
ヤンマーホールディングス株式会社
作業機械
14日前
ヤンマーホールディングス株式会社
建設機械
14日前
ヤンマーホールディングス株式会社
作業機械
8日前
日立建機株式会社
作業機械
11日前
日立建機株式会社
作業車両
11日前
日立建機株式会社
作業機械
11日前
日立建機株式会社
作業機械
8日前
日立建機株式会社
作業車両
7日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
作業車両
7日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
作業機械
8日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ