TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024137187
公報種別
公開特許公報(A)
公開日
2024-10-07
出願番号
2023048606
出願日
2023-03-24
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人武和国際特許事務所
主分類
E02F
9/24 20060101AFI20240927BHJP(水工;基礎;土砂の移送)
要約
【課題】操作パターンを誤認していることをオペレータに速やかに認識させて、油圧ショベルが意図しない動作で大きく動くのを防止可能な作業機械を提供する。
【解決手段】作業機械は、下部走行体と、下部走行体に旋回可能に支持された上部旋回体と、上部旋回体に支持された作業装置と、上部旋回体または作業装置の動作を指示する操作信号を操作量に応じて出力する操作装置と、操作装置から出力された操作信号に基づいて、上部旋回体または作業装置の動作を制御するコントローラとを備える。コントローラは、操作信号の出力が開始されてから閾値時間が経過するまでは、操作量に拘わらず予め定められた初期速度で上部旋回体または作業装置の動作を制御する初期制御を実行すると共に、操作信号の出力が開始されてから閾値時間が経過した後には、操作量に対応する速度で上部旋回体または作業装置の動作を制御するメイン制御を実行する。
【選択図】図7
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体に旋回可能に支持された上部旋回体と、
前記上部旋回体に支持された作業装置と、
前記上部旋回体または前記作業装置の動作を指示する操作信号を操作量に応じて出力する操作装置と、
前記操作装置から出力された前記操作信号に基づいて、前記上部旋回体または前記作業装置の動作を制御するコントローラと、を備えた作業機械において、
前記コントローラは、前記操作信号の出力が開始されてから閾値時間が経過するまでは、前記操作量に拘わらず予め定められた初期速度で前記上部旋回体または前記作業装置の動作を制御する初期制御を実行すると共に、前記操作信号の出力が開始されてから前記閾値時間が経過した後には、前記操作量に対応する速度で前記上部旋回体または前記作業装置の動作を制御するメイン制御を実行することを特徴とする作業機械。
続きを表示(約 610 文字)
【請求項2】
請求項1に記載の作業機械において、
動力源となるエンジンを備え、
前記コントローラは、
前記エンジンが始動されてから最初に前記操作信号が出力された場合には、前記初期制御を行い、
前記エンジンが始動されてから最初に前記操作信号が出力され且つ前記操作信号の出力が停止した状態を経て、再び前記操作信号が出力された場合には、前記初期制御を行わずに前記メイン制御を行うことを特徴とする作業機械。
【請求項3】
請求項2に記載の作業機械において、
前記コントローラは、前記エンジンが始動されてから最初に前記操作信号が出力され且つ前記操作信号の出力が停止した状態を経て、再びに前記操作信号が出力された場合に、
前記操作信号の出力が停止している無操作期間が閾値期間以上であるときには、前記初期制御を行い、
前記無操作期間が前記閾値期間未満であるときには、前記初期制御を行わずに前記メイン制御を行うことを特徴とする作業機械。
【請求項4】
請求項1に記載の作業機械において、
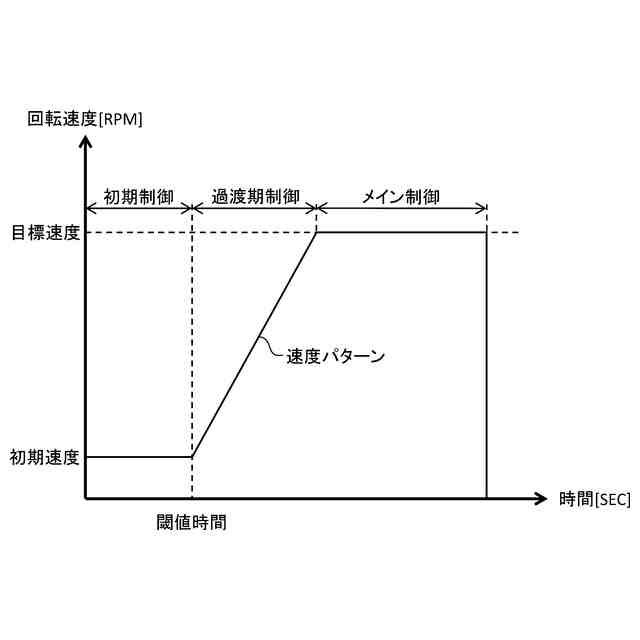
前記コントローラは、前記初期制御と前記メイン制御とを切り換えるときには、予め定められた速度パターンに従って、前記上部旋回体または前記作業装置の動作の動作速度を前記初期速度から前記操作量に対応する速度まで増速する過渡期制御を行うことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、下部走行体、上部旋回体、及び作業装置を備える作業機械に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
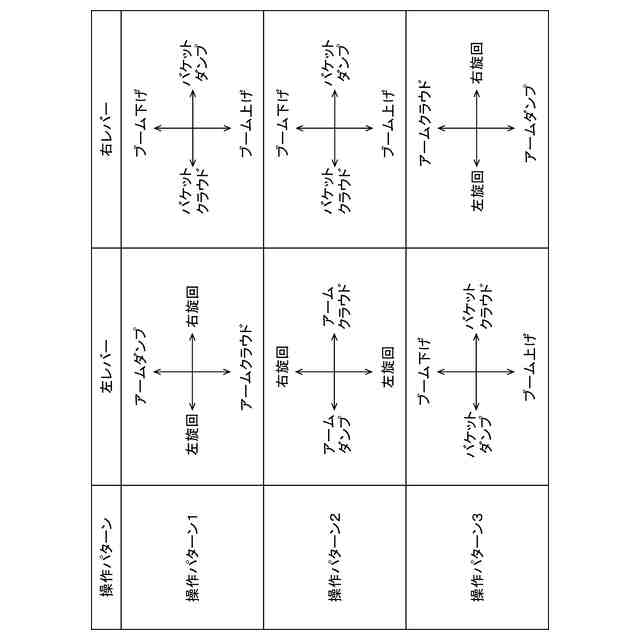
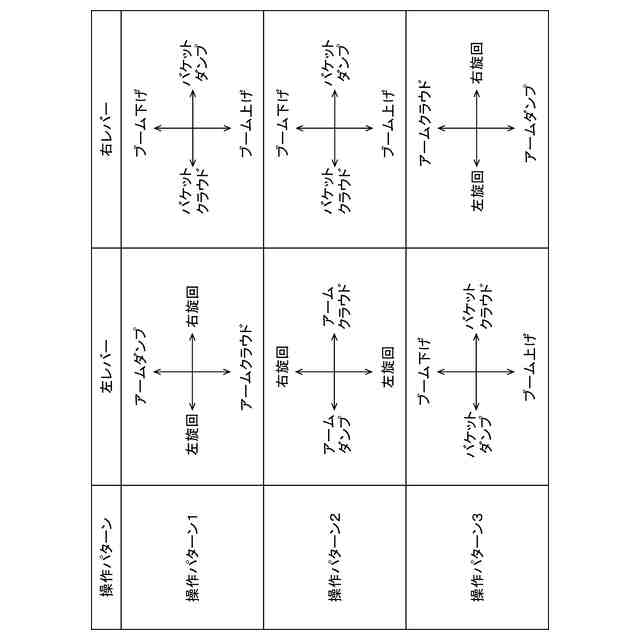
従来より、油圧ショベルでは、上部旋回体の旋回、ブームの起伏、アームのクラウド及びダンプ、バケットのクラウド及びダンプが、左右の操作レバーの操作によって行われる。図7は、油圧ショベルの操作パターンの代表例を示す図である。図7に示すように、左右の操作レバーの操作パターンは、製造メーカ毎または機種毎に異なって設定されていることがある。
【0003】
特許文献1では、運転者が操作レバーを把持してないときに、油圧ショベルの動作によって生じる操作レバーへの慣性力に起因する誤操作を防止するために、オペレータが操作レバーを把持しているか否かを判断し、操作を有効化するか無効化するかを切り替える技術がある。
【先行技術文献】
【特許文献】
【0004】
特開2021-50548号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の技術では、車体動作に伴う慣性力に起因する誤操作を防止することはできる。しかし、操作レバーの誤操作としては車体動作に起因するものだけでなく、オペレータの誤認に起因する誤操作も存在する。オペレータに誤認に起因する誤操作として、操作レバーの操作パターンの誤認がある。
【0006】
オペレータが操作レバーの操作パターンを誤認したままま、操作レバーを操作してしまった場合、オペレータが操作パターンを誤認していることを速やかに認識し、操作を中止または変更するなどの対応を取らなければ、油圧ショベルが意図しない動作で大きく動いてしまう。
【0007】
本発明は、上記した実状に鑑みてなされたものであり、その目的は、操作パターンを誤認していることをオペレータに速やかに認識させて、油圧ショベルが意図しない動作で大きく動くのを防止可能な作業機械を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は、下部走行体と、前記下部走行体に旋回可能に支持された上部旋回体と、前記上部旋回体に支持された作業装置と、前記上部旋回体または前記作業装置の動作を指示する操作信号を操作量に応じて出力する操作装置と、前記操作装置から出力された前記操作信号に基づいて、前記上部旋回体または前記作業装置の動作を制御するコントローラと、を備えた作業機械において、前記コントローラは、前記操作信号の出力が開始されてから閾値時間が経過するまでは、前記操作量に拘わらず予め定められた初期速度で前記上部旋回体または前記作業装置の動作を制御する初期制御を実行すると共に、前記操作信号の出力が開始されてから前記閾値時間が経過した後には、前記操作量に対応する速度で前記上部旋回体または前記作業装置の動作を制御するメイン制御を実行することを特徴とする。
【発明の効果】
【0009】
本発明によれば、操作パターンを誤認していることをオペレータに速やかに認識させて、油圧ショベルが意図しない動作で大きく動くのを防止することができる。なお、上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
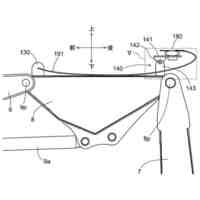
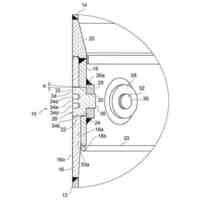
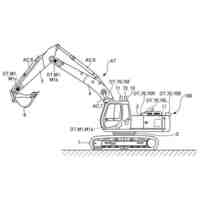
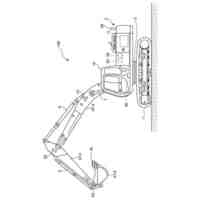
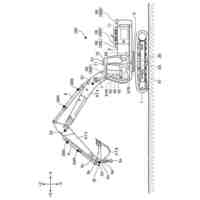
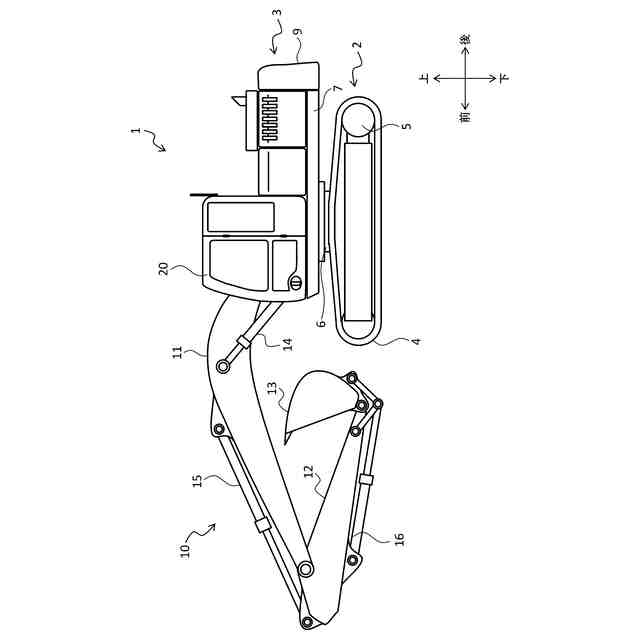
油圧ショベルの側面図である。
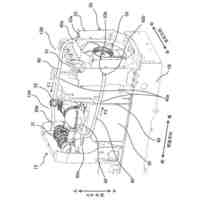
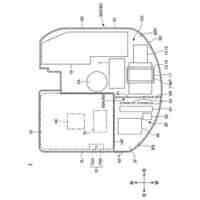
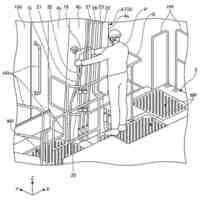
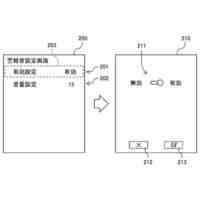
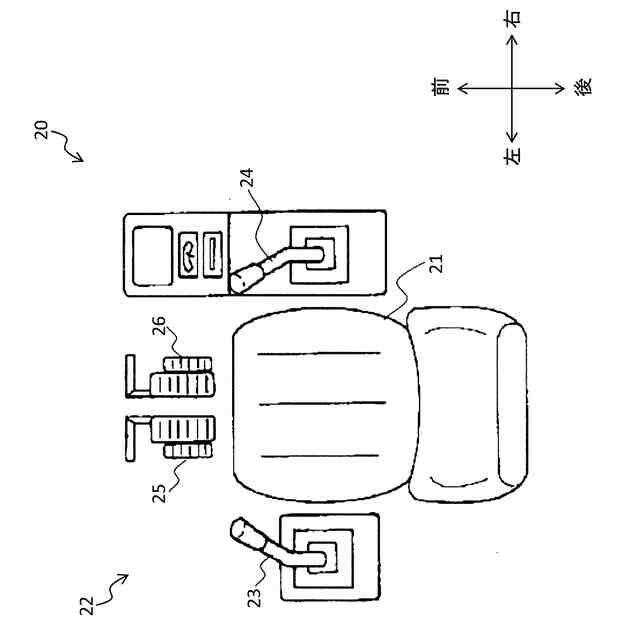
キャブの内部を示す模式図である。
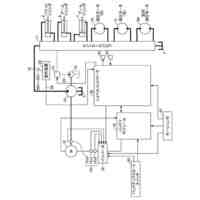
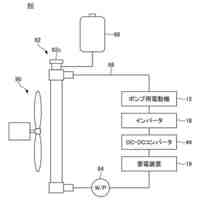
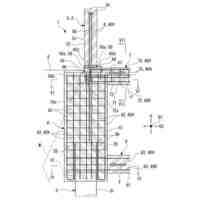
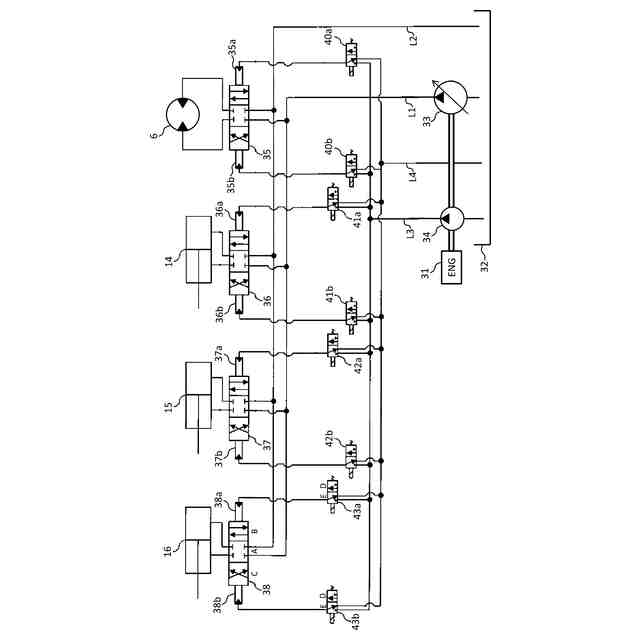
油圧ショベルの駆動回路を示す図である。
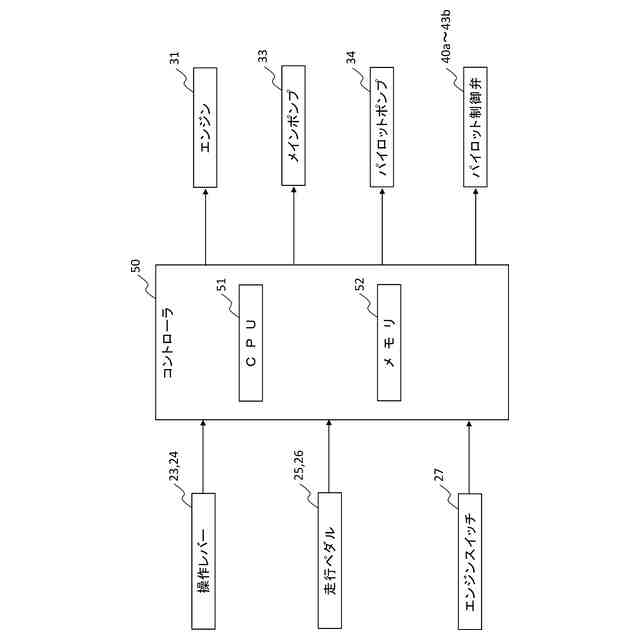
油圧ショベルの制御ブロック図である。
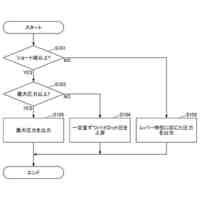
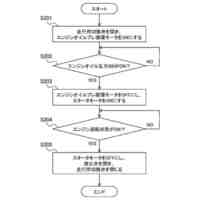
旋回制御処理のフローチャートである。
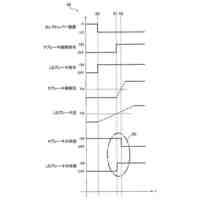
旋回制御処理における旋回モータの回転速度の推移の例を示す図である。
油圧ショベルの操作パターンの代表例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
5日前
日立建機株式会社
作業機械
11日前
日立建機株式会社
電子機器装置
5日前
日立建機株式会社
ダンプトラック
4日前
個人
耐震原子炉設備
14日前
FKS株式会社
擁壁
19日前
株式会社forch
土採取装置
20日前
鹿島建設株式会社
基礎構造
13日前
株式会社竹中工務店
建築方法
11日前
株式会社クボタ
作業車
5日前
株式会社富田製作所
継手部構造
13日前
住友建機株式会社
ショベル
5日前
住友建機株式会社
作業機械
6日前
住友建機株式会社
ショベル
5日前
住友建機株式会社
ショベル
5日前
住友建機株式会社
ショベル
12日前
住友建機株式会社
作業機械
4日前
住友建機株式会社
ショベル
26日前
住友建機株式会社
ショベル
18日前
住友建機株式会社
ショベル
4日前
住友建機株式会社
ショベル
18日前
住友建機株式会社
ショベル
18日前
株式会社テノックス九州
地盤改良方法
25日前
住友建機株式会社
電動ショベル
25日前
株式会社クボタ
作業車両
11日前
日本車輌製造株式会社
建設機械
4日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
建設機械
13日前
株式会社クボタ
作業機
13日前
ナブテスコ株式会社
ショベルカー
25日前
住友重機械工業株式会社
ショベル
5日前
住友重機械工業株式会社
ショベル
19日前
大仲建設株式会社
スコップ
11日前
住友重機械工業株式会社
ショベル
7日前
エバタ株式会社
下水道施設の再構築方法
18日前
大成建設株式会社
杭基礎構造
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ