TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024092933
公報種別
公開特許公報(A)
公開日
2024-07-08
出願番号
2023125747
出願日
2023-08-01
発明の名称
カバーおよびロボットハンド
出願人
新東工業株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B25J
19/00 20060101AFI20240701BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
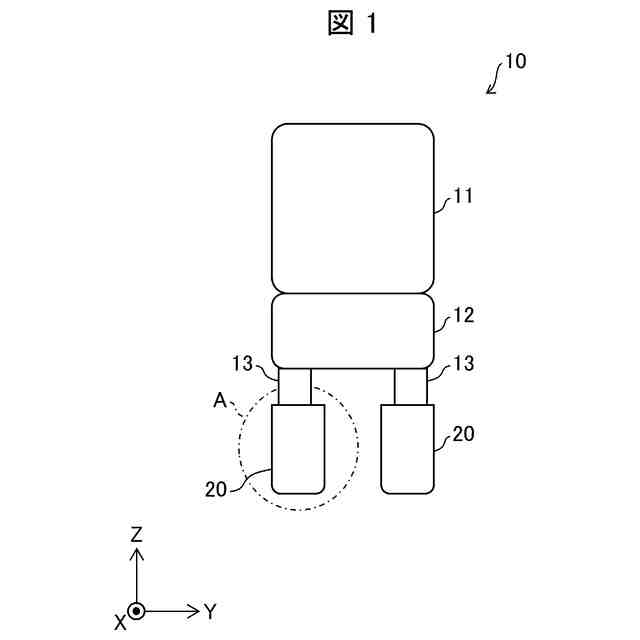
【課題】ロボットハンドの把持部で利用されるセンサのノイズによる精度の低下を抑制する技術を実現する。
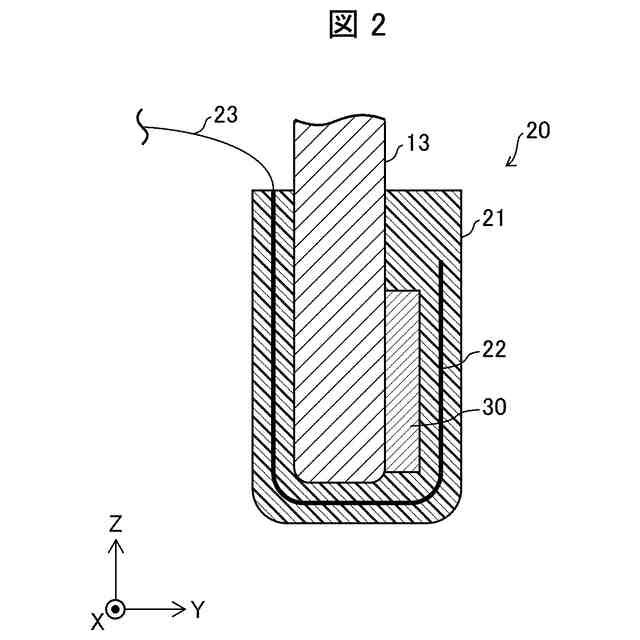
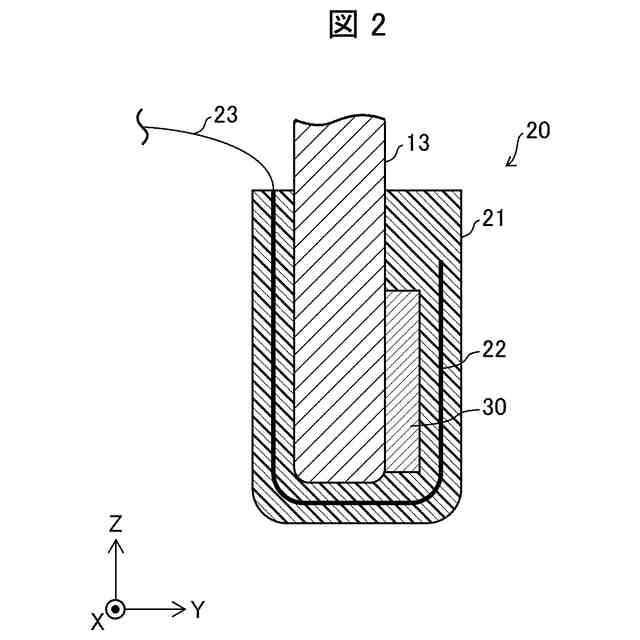
【解決手段】カバー(20)は、ロボットハンド(12)の把持部(13)を覆う絶縁体製の被覆部(21)と、その内部に設けられた導体製の遮蔽層(22)とを備える。把持部(13)に備えられたセンサ(30)、あるいは被覆部(21)に設けられたセンサ(30)を遮蔽層(22)が覆っている。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットハンドの把持部に装着されるカバーであって、
絶縁体により構成され、ロボットハンドの把持部を覆う被覆部と、
導体により構成され、前記被覆部の内部または表面に設けられた遮蔽層と、を備え、
(1)前記把持部にセンサが設けられており、前記遮蔽層が当該センサを覆うように設けられている、または、(2)前記被覆部にセンサが設けられており、当該センサが前記遮蔽層に覆われている、カバー。
続きを表示(約 230 文字)
【請求項2】
前記被覆部は、前記把持部および前記センサの外形に対応する形状の空洞を有する樹脂成形物である、請求項1に記載のカバー。
【請求項3】
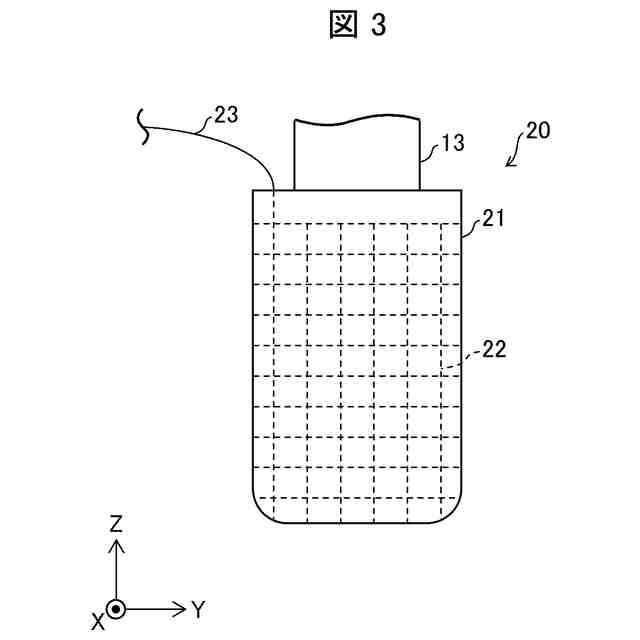
前記遮蔽層は、導体のワイヤがメッシュ状に配置されてなる、請求項1に記載のカバー。
【請求項4】
前記遮蔽層に接続され、グランドに接続される接地用導線を有する、請求項1に記載のカバー。
【請求項5】
請求項1~4のいずれか一項に記載のカバーを備えるロボットハンド。
発明の詳細な説明
【技術分野】
【0001】
本発明は、カバーおよびロボットハンドに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
ロボットハンドは、物品の製造および搬送などの様々な分野で利用されている。このような分野では、ロボットハンドの把持部(例えば、爪部)に、例えば静電容量式あるいは感圧式の接触センサを取り付け、物品(「把持物」とも言う)から把持部に作用する力、すなわち、把持部から物品に作用する力をセンサで検出することが行われている。センサによる検出値は、例えば、把持力をフィードバック制御するために参照される。そのため、脆弱な把持物を把持部により把持する場合、当該センサの精度が十分に高いことが求められる。ロボットハンドに取り付けられたセンサの精度を高める技術には、センサからの配線または回路を変更することによって当該センサの精度を高める技術が知られている(例えば、特許文献1および特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-167747号公報
特開2021-166149号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、静電容量式あるいは感圧式のセンサは、一般にノイズの影響を受けやすい。そのため、上述のような従来技術では、センサの配線または回路で吸収しきれないノイズがセンサの検出値に影響を及ぼすことがある。また、ロボットハンドが把持する把持物が帯電しやすい場合には、ロボットハンドの把持部に設けられたセンサは、帯電した把持物の電界によるノイズの影響を受けることがある。また、ロボットが配置される自動化された生産現場では様々なノイズが発生する。そのため、ロボットハンドの把持部に設けられたセンサは、生産現場で種々のノイズの影響を受ける。
【0005】
その結果、把持部から把持物に作用する力を正確に検出することができず、ロボットハンドが把持物を傷つけてしまうことがある。特に、把持部に加えられた荷重を検出する感圧式センサは、薄型であり、かつ、仕組みが簡単であるといった利点がある一方で、ノイズを感知しやすく、これまでロボットハンドに搭載することができなかった。
【0006】
本発明の一態様は、ロボットハンドの把持部で利用されるセンサのノイズによる精度の低下を抑制する技術を実現することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明の一態様に係るカバーは、ロボットハンドの把持部に装着されるカバーであって、絶縁体により構成され、ロボットハンドの把持部を覆う被覆部と、導体により構成され、前記被覆部の内部または表面に設けられた遮蔽層と、を備え、(1)前記把持部にセンサが設けられており、前記遮蔽層が当該センサを覆うように設けられている、または、(2)前記被覆部にセンサが設けられており、当該センサが前記遮蔽層に覆われている。
【0008】
また、上記の課題を解決するために、本発明の一態様に係るロボットハンドは、上記のカバーを備える。
【発明の効果】
【0009】
本発明の一態様によれば、ロボットハンドの把持部で利用されるセンサのノイズによる精度の低下を抑制することができる。
【図面の簡単な説明】
【0010】
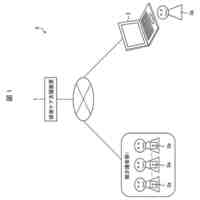
本発明の一実施形態に係るロボットハンドの構成を模式的に示す図である。
図1のA部における把持部およびカバーをYZ平面で切断した断面を模式的に示す図である。
図1のA部におけるカバーを模式的に示す図である。
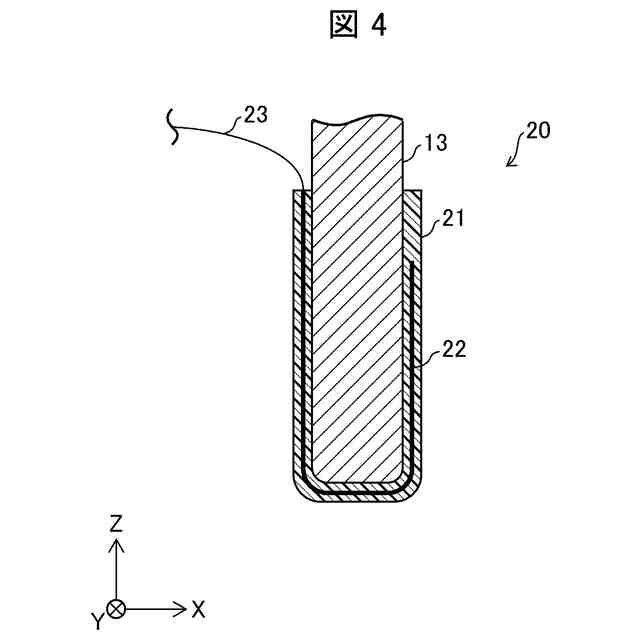
図1のA部における把持部およびカバーをXZ平面で切断した断面を模式的に示す図である。
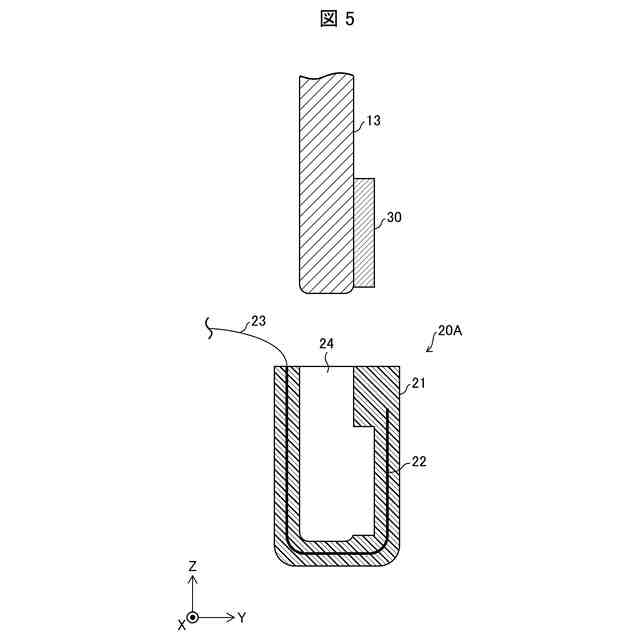
本発明の実施形態に係るカバーの一例を模式的に示す断面図である。
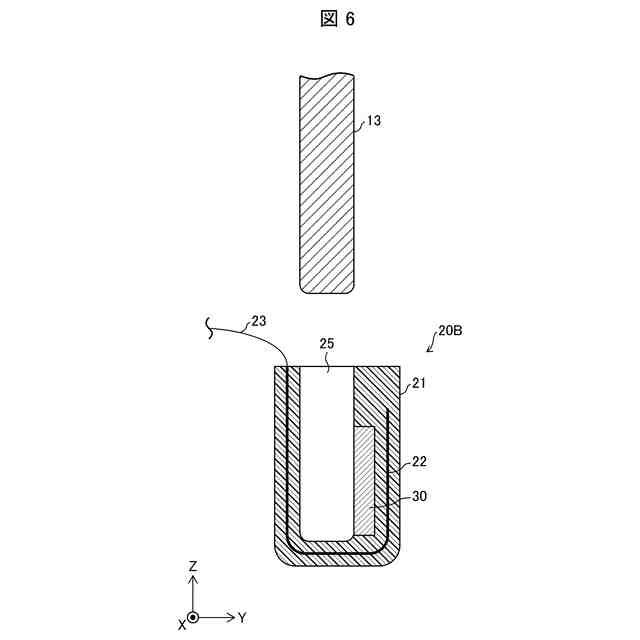
本発明の実施形態に係るカバーの他の例を模式的に示す断面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
新東工業株式会社
測定モジュール
1日前
新東工業株式会社
積層造形品の処理方法
7日前
新東工業株式会社
排泄ケア支援装置及び排泄ケア支援方法
1か月前
新東工業株式会社
光合成微生物回収装置及び光合成微生物回収方法
18日前
新東工業株式会社
情報処理装置、アルコールチェッカ、及びアルコール測定システム
1か月前
新東工業株式会社
検査装置、及び検査方法
1か月前
個人
木製ハンマー
1か月前
個人
関節モジュール
29日前
個人
寸切りボルト回し
25日前
個人
スロットルトリガー
1か月前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
4か月前
コクヨ株式会社
補助器具
19日前
太陽工業株式会社
チャック装置
12日前
株式会社ツノダ
挟持工具
6か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
株式会社右川ゴム製造所
把持装置
6か月前
日東工器株式会社
衝撃工具
3か月前
個人
メンテナンス用スタンド
2か月前
川崎重工業株式会社
罫書用治具
3か月前
CKD株式会社
把持装置
1か月前
学校法人立命館
グリッパ
1か月前
トヨタ自動車株式会社
ロボット
1か月前
東京計器株式会社
接触検知装置
1か月前
株式会社マキタ
動力工具
4か月前
オムロン株式会社
電動把持工具
18日前
白山工業株式会社
ロボットアーム
1か月前
個人
容器引っ掛け棒およびその使用方法
2か月前
トヨタ自動車株式会社
ハンド構造
3か月前
株式会社ダイヘン
搬送装置
4か月前
株式会社ダイヘン
搬送装置
4か月前
株式会社ハーモ
開閉チャック装置
2か月前
個人
回転工具およびバリ取り部品
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ