TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024086639
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2023209122
出願日
2023-12-12
発明の名称
深部衝突の回避
出願人
ファナック株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20240620BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ミンコフスキー球を用いて脱出ベクトルを計算するロボットシステムにおいて物体間の深部衝突の回避を提供するためのシステムおよび方法を実現する。
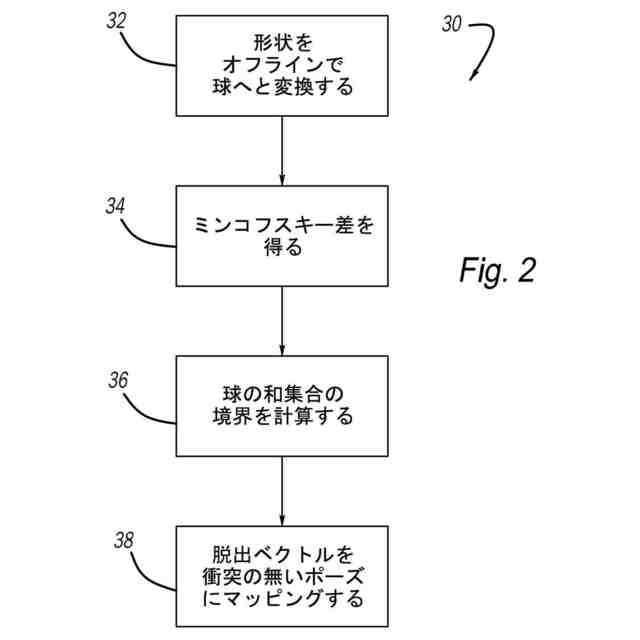
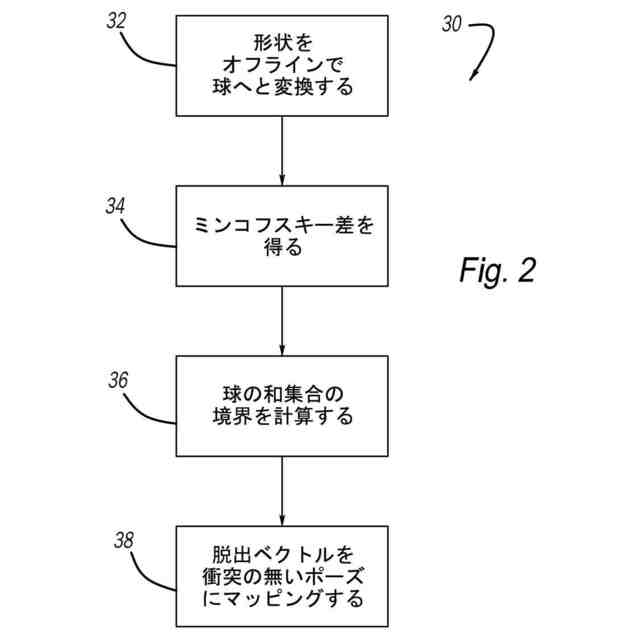
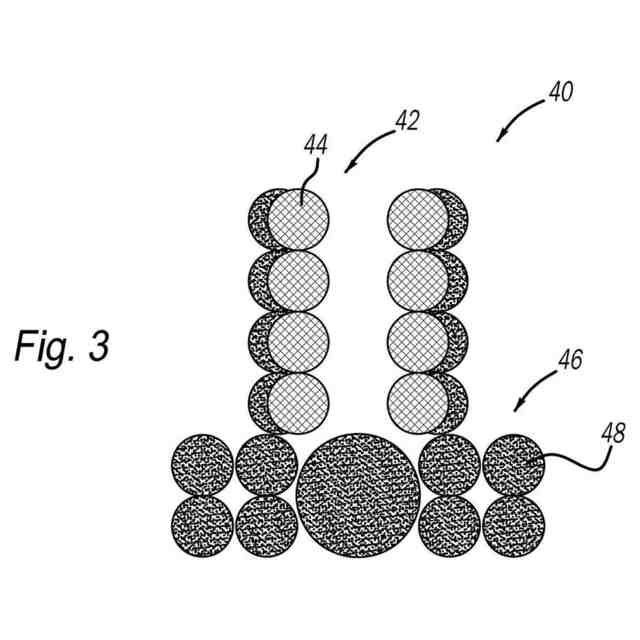
【解決手段】ロボットシステム内の物体間の深部衝突の回避を提供するためのシステムおよび方法。部品と物体間の衝突について、該方法は、部品を公知の半径および中心位置を有する部品球の和集合へと分解し、かつ物体を公知の半径および中心位置を有する物体球の和集合へと分解する。該方法は、部品球と物体球の各対との間のミンコフスキー差を得、各ミンコフスキー差を公知の中心位置および半径を有するミンコフスキー球へと変換し、ミンコフスキー球を重複するミンコフスキー球の和集合の形に組合わせる。該方法は、重複するミンコフスキー球の和集合の外側境界を決定し、脱出ベクトルとして境界上の境界点を抽出し、脱出ベクトルの各々を、衝突の無い部品ポーズへとマッピングする。
【選択図】図2
特許請求の範囲
【請求項1】
部品と物体との間の衝突を防止するためのシステムであって、
少なくとも1つのプロセッサおよび前記少なくとも1つのプロセッサに、実行されたときに、
前記部品を公知の半径および中心位置を有する部品球の和集合へと分解させ、かつ前記物体を公知の半径および中心位置を有する物体球の和集合へと分解させ、
前記部品球と前記物体球の各対との間のミンコフスキー差を得させ、
各ミンコフスキー差を公知の中心位置および半径を有するミンコフスキー球へと変換させ、
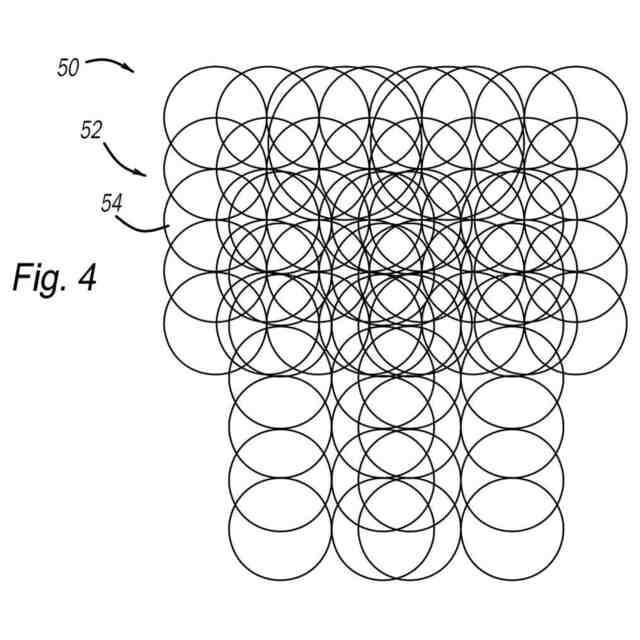
前記ミンコフスキー球を重複するミンコフスキー球の和集合の形に組合わせさせ、
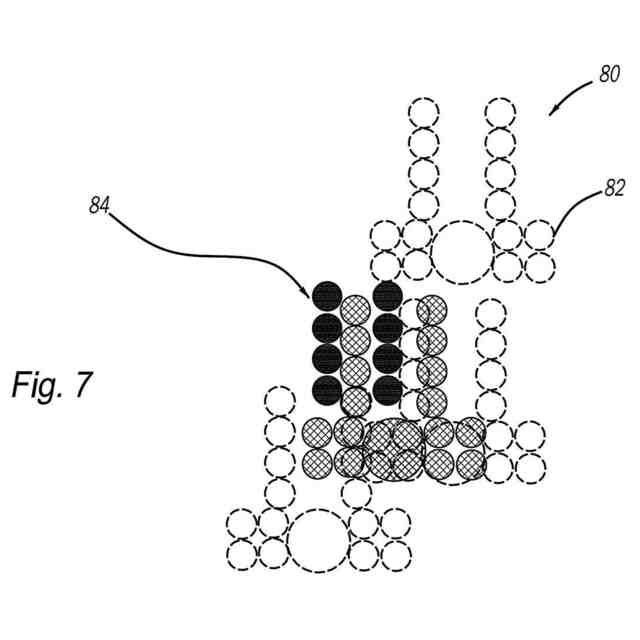
前記重複するミンコフスキー球の前記和集合の外側境界を決定させ、
脱出ベクトルとして前記境界上の境界点を抽出させ、
前記脱出ベクトルの各々を、衝突の無い部品ポーズへとマッピングさせる、
実行可能なコードおよびデータを記憶するメモリデバイスを含むコンピュータ、
を含むシステム。
続きを表示(約 890 文字)
【請求項2】
前記少なくとも1つのプロセッサが前記部品および前記物体をオフラインで分解する、請求項1に記載のシステム。
【請求項3】
前記少なくとも1つのプロセッサが前記部品および前記物体を、同じ半径を有する球へと分解する、請求項1に記載のシステム。
【請求項4】
前記少なくとも1つのプロセッサが、前記部品および前記物体を、さまざまな半径を有する球へと分解する、請求項1に記載のシステム。
【請求項5】
前記少なくとも1つのプロセッサが、前記対内の前記物体球の前記中心位置から前記対内の前記部品球の前記中心位置を減算することによって前記ミンコフスキー球の前記中心位置を識別し、かつ、前記対内の前記部品球の前記半径と前記対内の前記物体球の前記半径とを加算することによって前記ミンコフスキー球の前記半径を決定する、請求項1に記載のシステム。
【請求項6】
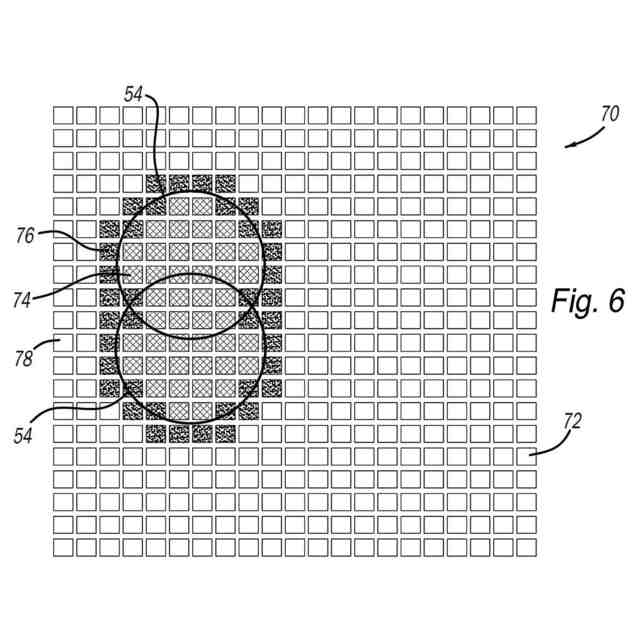
前記少なくとも1つのプロセッサが、前記重複するミンコフスキー球の前記和集合と、セルを有しかつこのセルが前記ミンコフスキー球との関係においてどこにあるかに応じて各セルに識別子を割当てるグリッド構造とを結び付けている、請求項1に記載のシステム。
【請求項7】
ミンコフスキー球の内部のセルには内部識別子が与えられ、ミンコフスキー球の境界上のセルには境界識別子が与えられ、未占有空間内のセルには未占有識別子が与えられる、請求項6に記載のシステム。
【請求項8】
各ミンコフスキー球についての前記セルには、他のミンコフスキー球とは独立した識別子が割当てられ、ミンコフスキー球間の重複する境界セルには前記内部識別子が与えられる、請求項7に記載のシステム。
【請求項9】
公知のサイズのミンコフスキーセルのためのセル識別子用のテンプレートが予め計算される、請求項7に記載のシステム。
【請求項10】
前記部品がロボットグリッパである、請求項1に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、概して、物体間の衝突の回避を提供するためのシステムおよび方法に関し、より詳細には、ミンコフスキー球を用いて脱出ベクトルを計算するロボットシステムにおいて物体間の深部衝突の回避を提供するためのシステムおよび方法に関する。
続きを表示(約 3,700 文字)
【背景技術】
【0002】
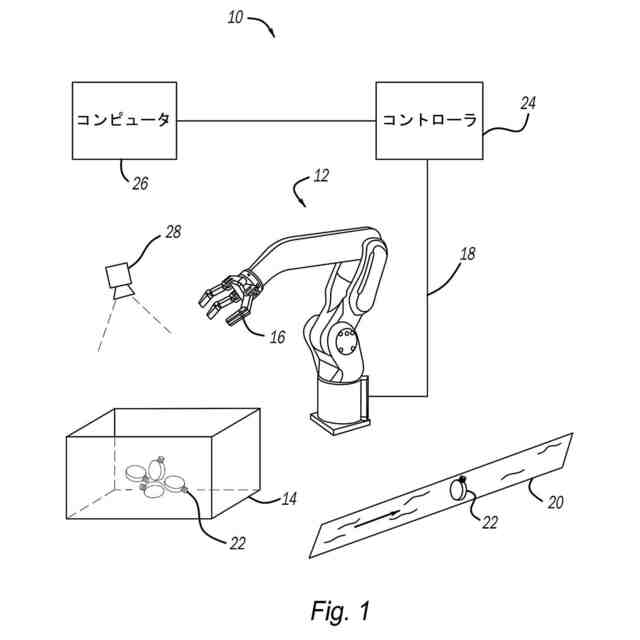
広範囲の製造、組立ておよび材料移動作業を行なう上で産業用ロボットの使用は、周知である。このような1つの利用分野が、ピックアンドプレイス作業であり、ここでロボットはビンから個別の部品をピックアップし、各部品をさらなる処理または梱包のため所定の場所に置く。ピックアンドプレイス作業の例としては、ビンから部品をピッキングし、コンベヤ上に部品を置き、そこで部品は次の作業のために取り上げられる作業、および部品をビンからピッキングしその部品を工作機械の固定具内に置き、そこで部品が機械加工される作業、そしてその後、後続して部品を工作機械から取り出し機械加工済み部品をコンベヤ上に置く作業、が含まれる。典型的には、ビン内の個別の部品の位置および配向を識別するために1台以上のカメラを含む視覚システム(vison system)が使用される。その後、選択された部品上で使用するために特定のロボット把持が識別され、ここで、把持は、特定の部品幾何形状および特定のグリッパ幾何形状用として生成された把持の予め計算されたデータベースから選択されてよい。しかしながら、選択された部品のための最適化された把持を行なうためのロボットの運動は、別の物体との衝突をひき起こす可能性があり、ここでロボットは、衝突を避けることができない。
【0003】
移動するロボットとロボット環境内の部品との間の衝突を防止することは、安全上の重要な考慮事項である。ロボット経路は、衝突が発生しないようにプログラミングされているものの、ロボット環境内の部品および物体の位置は、それらの意図された位置から変動する可能性がある。ロボットと物体との間に衝突が発生した場合、手動による回復無しにロボットが衝突に自動的に対処することが望ましい。ロボットシステムは、衝突の発生前にこれを予測することになり、これは単純に衝突検出の問題である。物体との衝突がロボットの外側表面のみで起こる軽微な衝突をロボットシステムが予測する場合には、ロボットは、衝突を回避するためにロボットの原初の計画された経路の周囲で迂回するべきであり、これは単純に衝突回避の問題である。より詳細には、軽微な衝突については、2つの衝突するボディ間の重複する表面を、ヒューリスティックを用いて発見することは容易である。表面の特性(例えば重複する表面の法線)を使用することで、システムを誘導して衝突から離れるように移動させることができる。ロボットシステムが、物体との衝突が直接的で外側表面におけるものでない深部衝突を予測する場合には、ロボットは、回復経路を決定する必要があり、これは、ヒューリスティックによる深部衝突の回避では不充分であるという点において、複雑な深部衝突回避の問題である。より具体的には、深部衝突の場合、衝突する物体の重複した領域はいかなる表面情報も提供せず、したがって、ロボットシステムは、衝突を避けるための方向を発見することができない。
【0004】
当該技術分野においては、以上で言及した深部衝突回避問題を解決するために、数学的ツールが使用されてきた。2つのボディが衝突した場合、それらは、少なくとも1つの一致点対を有し、代替的には、2つのボディの間に少なくとも1つの一致点対が存在する場合、2つのボディは互いに衝突することになる。ミンコフスキー距離は、ユークリッド距離およびマンハッタン距離の両方の一般化とみなすことのできるベクトル空間内の測定基準であり、この観察に基づいて2つのボディ間で定義された演算である。このプロセスは、第1のボディ内の全ての点から第2のボディ内の他の全ての点を差し引いたものを網羅的に取り上げ、新たな形状またはボディを生成する。ミンコフスキー形状がその境界の内部に原点を含む場合、それは、第1のボディと第2のボディとの間に一致点が存在することを意味し、2つのボディは互いに衝突することになる。興味深いことに、ミンコフスキー差の境界は、衝突回避情報を担持する。すなわち、原点を任意の境界点と連結すると、脱出ベクトル(方向および長さ)が形成される。長さ距離を伴ってこの方向に第2のボディを移動させると、軽微な衝突であるか深部衝突であるかに関わらず衝突は防止されることになる。
【0005】
ミンコフスキー差を決定することは、脱出ベクトルの計算のための綿密な方法である。しかしながら、原初のミンコフスキー差は、網羅的演算のため非常に緩慢である。例えば、両方のボディが1,000,000個の点を含む場合には、ミンコフスキー差は1,000,000,000,000回の減算演算を必要とする。
【0006】
深部衝突回避のためにミンコフスキー差を使用することの計算上の複雑さを削減する目的で、凸形状についての衝突を検出するために、ギルバート・ジョンソン・キールティ(Gilbert Johnson Keerthi:GJK)アルゴズムが開発され、貫通距離を計算するために拡張ポリトープアルゴリズム(Expanding Polytope Algorithm:EPA)が開発された。これら2つのアルゴリズムは、多くの場合GJK-EPA技術として組合わされて、凸形状のための完全深部衝突回避を行なう。GJK-EPA技術は、ミンコフスキー差に基づくものであり、ミンコフスキー差の部分的境界を計算するだけで貫入深度計算を高速化する。この部分的境界を用いて、GJK-EPA技術は次に、衝突を回避するための最短の脱出ベクトルを検索する。GJK-EPA技術の速度および実装が容易であるという特性のため、GJK-EPA技術は、ロボットシステムにおいて衝突回避を提供するための最も良く知られ広く使用されている方法の1つとなった。
【0007】
GJK-EPA技術の1つの欠点は、非凸形状では正しい脱出ベクトルを計算できないということにある。衝突回避に関与する形状Pおよび形状Qを考慮されたい。P形状が非凸状である場合、多数の凸状の下位形状P_iへとそれを分解しなければならない。このとき、GJK-EPA技術は、下位形状P_iおよび形状Qの各々について独立して脱出ベクトルを計算する。結果としての脱出ベクトルは、下位形状P_iおよび形状Qについての全てのGJK-EPA計算がP/P_iを無視していることから、グラウンドトゥルース脱出ベクトルを回復するために組合せることができない。換言すると、非凸形状については、任意の非凸状部品を近似凸形状に分割するために凸分解が必要とされる。このとき、GJK-EPA技術は、対応するベクトルv_1およびv_2を計算するために下位形状の各々に適用される。後でベクトルv_1およびv_2を組合わせても、真の脱出ベクトルを得ることはできない。本質的に、下位形状の各々についてGJK-EPA技術を適用することにより、他の補完的下位形状は無視される。結果として、ベクトルv_1またはベクトルv_2のいずれも衝突を回避できない。
【0008】
GJK-EPA技術の別の欠点は、それが最短の脱出ベクトルしか計算しないという点にある。しかしながら、このベクトルは、下流側の計画タスクにとって充分な脱出ベクトルとは言えない可能性がある。形状Pが、狭い通路Qを通過するようにサンプリング方法(例えばRRT)によって計画されている下流側タスクを考慮されたい。形状Pのランダムな位置サンプルを所与として、形状Pのための最短の脱出ベクトルは、外に移動している可能性がある一方で、意味のあるサンプルを生成する目的で形状Pの理想的脱出ベクトルが通路内に移動している可能性がある。
【発明の概要】
【0009】
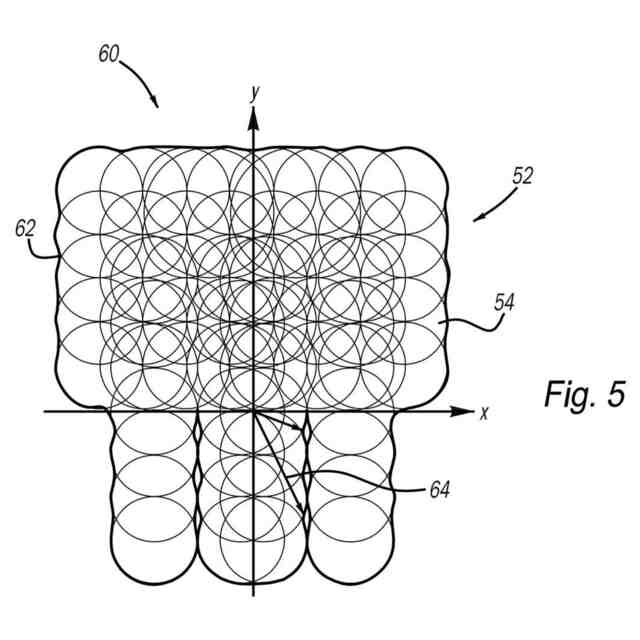
本開示は、ミンコフスキー球を用いて脱出ベクトルを計算する、ロボットシステム内の物体間の深部衝突の回避を提供するためのシステムおよび方法について記述する。部品と物体間の衝突について、該方法は、部品を公知の半径および中心位置を有する部品球の和集合へと分解し、かつ物体を公知の半径および中心位置を有する物体球の和集合へと分解する。該方法は、部品球と物体球の各対との間のミンコフスキー差を得、各ミンコフスキー差を公知の中心位置および半径を有するミンコフスキー球へと変換し、ミンコフスキー球を重複するミンコフスキー球の和集合の形に組合わせる。該方法は、重複するミンコフスキー球の和集合の外側境界を決定し、脱出ベクトルとして境界上の境界点を抽出し、脱出ベクトルの各々を、衝突の無い部品ポーズへとマッピングする。
【0010】
ここで開示される方法の追加の特徴は、添付図面と併せて以下の説明および添付のクレームを考慮することにより明白になるものである。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
個人
ペットボトル用蓋開け具。
8か月前
株式会社ツノダ
挟持工具
3か月前
UTM株式会社
搬送装置
7か月前
株式会社右川ゴム製造所
把持装置
3か月前
日東工器株式会社
衝撃工具
8日前
川崎重工業株式会社
ハンド
4か月前
個人
ロボットシステム
6か月前
トヨタ自動車株式会社
関節機構
7か月前
トヨタ自動車株式会社
関節機構
6か月前
株式会社不二越
ロボット
6か月前
株式会社マキタ
動力工具
1か月前
川崎重工業株式会社
罫書用治具
25日前
学校法人立命館
ロボットハンド
4か月前
学校法人立命館
グリッパ
3か月前
個人
プーリーキー抜き治具
3か月前
トヨタ自動車株式会社
ハンド構造
15日前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
個人
作業台
7か月前
宮川工機株式会社
板状部品移動装置
1か月前
株式会社不二越
予測システム
4か月前
国立大学法人山形大学
二重関節機構
1か月前
CKD株式会社
電動把持装置
2か月前
東京都公立大学法人
ロボットハンド
1か月前
国立大学法人東北大学
剛性可変連結体
7か月前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
株式会社中村製作所
トルクドライバー
4か月前
工機ホールディングス株式会社
作業機
1か月前
個人
スロープバリビス-ビス&-ドライバー
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ