TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024080366
公報種別
公開特許公報(A)
公開日
2024-06-13
出願番号
2022193495
出願日
2022-12-02
発明の名称
重量検出装置、重量検出方法、および、重量検出プログラム
出願人
ソフトバンクグループ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B66F
9/24 20060101AFI20240606BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】積載物における内容物の重量を検出すること。
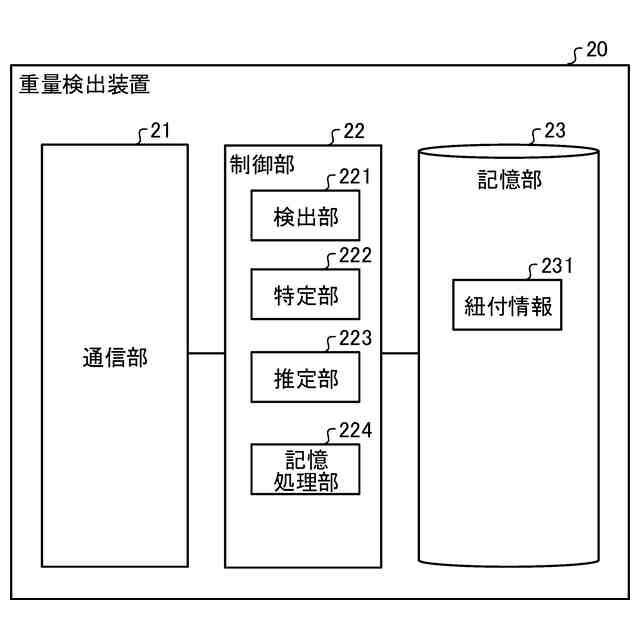
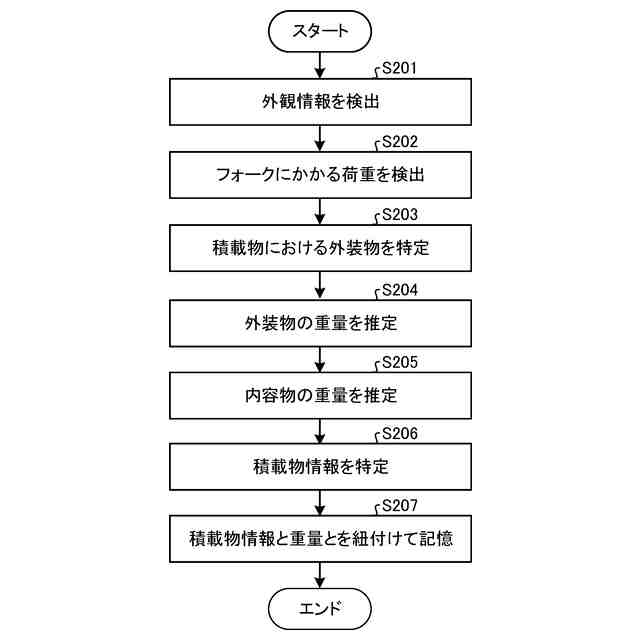
【解決手段】実施形態に係る重量検出装置は、検出部と、特定部と、推定部とを備える。検出部は、フォークに挿入されるパレットに載っている積載物の外観情報を検出する。特定部は、検出した外観情報に基づいて、積載物における内容物以外の外装物を特定する。推定部は、特定した外装物に基づいて、内容物の重量を推定する。
【選択図】図2
特許請求の範囲
【請求項1】
フォークに挿入されるパレットに載っている積載物の外観情報を検出する検出部と、
検出した前記外観情報に基づいて、前記積載物における内容物以外の外装物を特定する特定部と、
特定した前記外装物に基づいて、前記内容物の重量を推定する推定部と
を備える重量検出装置。
続きを表示(約 880 文字)
【請求項2】
前記検出部は、
前記フォークに設けられた荷重センサにより前記フォークにかかる荷重を検出し、
前記推定部は、
前記外装物の重量を推定し、前記荷重および前記外装物の重量に基づいて前記内容物の重量を推定する、請求項1に記載の重量検出装置。
【請求項3】
前記検出部は、
前記パレットの重量を検出し、
前記推定部は、
前記荷重から前記パレットの重量および前記外装物の重量を減算することで前記内容物の重量を推定する、請求項2に記載の重量検出装置。
【請求項4】
前記検出部は、
前記パレットに記された重量情報をセンサにより検出することで、前記パレットの重量を検出する、請求項3に記載の重量検出装置。
【請求項5】
前記重量情報は、
前記パレットの重量の情報が埋め込まれたコード情報である、請求項4に記載の重量検出装置。
【請求項6】
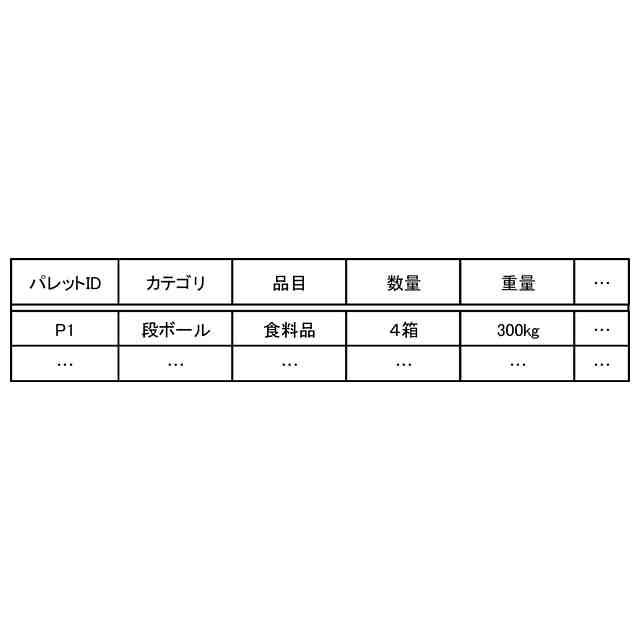
前記外観情報に基づいて特定される前記積載物に関する積載物情報と、推定した前記内容物の重量とを紐づけて記憶部に記憶する記憶処理部をさらに備える、請求項1に記載の重量検出装置。
【請求項7】
コンピュータによって実行される重量検出方法であって、
フォークに挿入されるパレットに載っている積載物の外観情報を検出する検出工程と、
検出した前記外観情報に基づいて、前記積載物における内容物以外の外装物を特定する特定工程と、
特定した前記外装物に基づいて、前記内容物の重量を推定する推定工程と
を含む重量検出方法。
【請求項8】
フォークに挿入されるパレットに載っている積載物の外観情報を検出する検出手順と、
検出した前記外観情報に基づいて、前記積載物における内容物以外の外装物を特定する特定手順と、
特定した前記外装物に基づいて、前記内容物の重量を推定する推定手順と
をコンピュータに実行させる重量検出プログラム。
発明の詳細な説明
【技術分野】
【0001】
開示の実施形態は、重量検出装置、重量検出方法、および、重量検出プログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、フォークの基端に設けられたカメラによりフォークの先端側を撮像してフォークを自動制御するフォークリフトが提案されている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-17613号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術は、積載物における内容物の重量を検出する点で改善の余地があった。
【0005】
本発明は、上記に鑑みてなされたものであって、積載物における内容物の重量を検出することができる重量検出装置、重量検出方法、および、重量検出プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
実施形態の一態様に係る重量検出装置は、検出部と、特定部と、推定部とを備える。前記検出は、フォークに挿入されるパレットに載っている積載物の外観情報を検出する。前記特定部は、検出した前記外観情報に基づいて、前記積載物における内容物以外の外装物を特定する。前記推定部は、特定した前記外装物に基づいて、前記内容物の重量を推定する。
【発明の効果】
【0007】
実施形態の一態様によれば、フォーク先端の状況をより正確に把握することができる。
【図面の簡単な説明】
【0008】
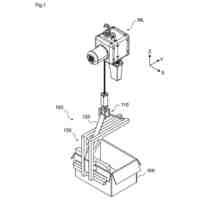
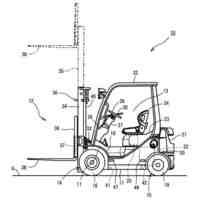
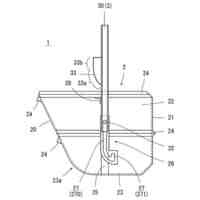
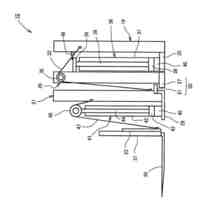
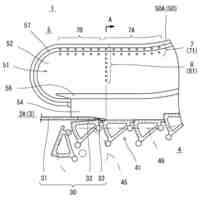
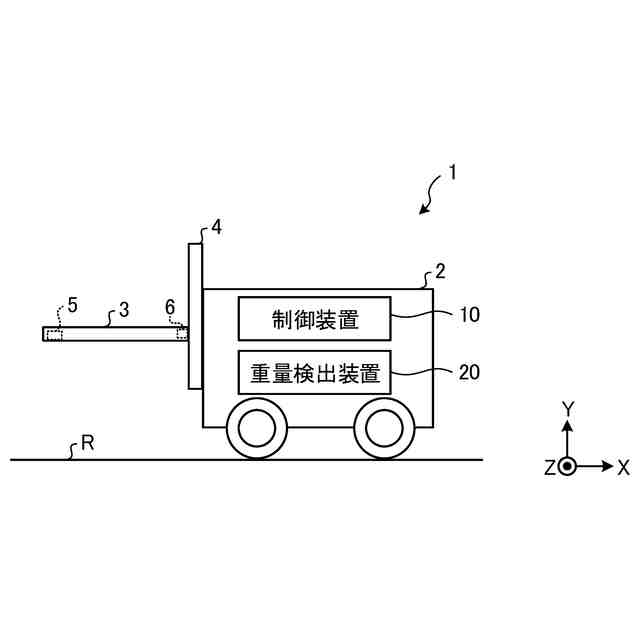
図1は、本実施形態に係るフォークリフトの概略側面図である。
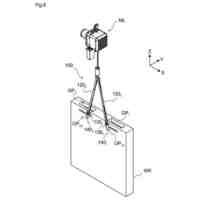
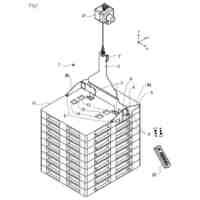
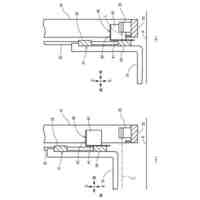
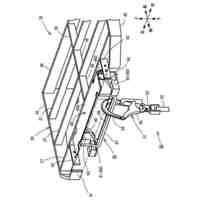
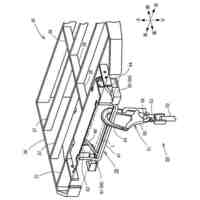
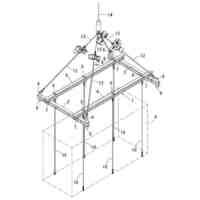
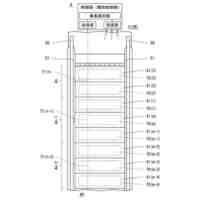
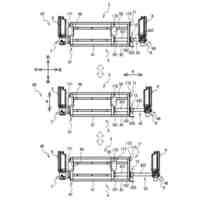
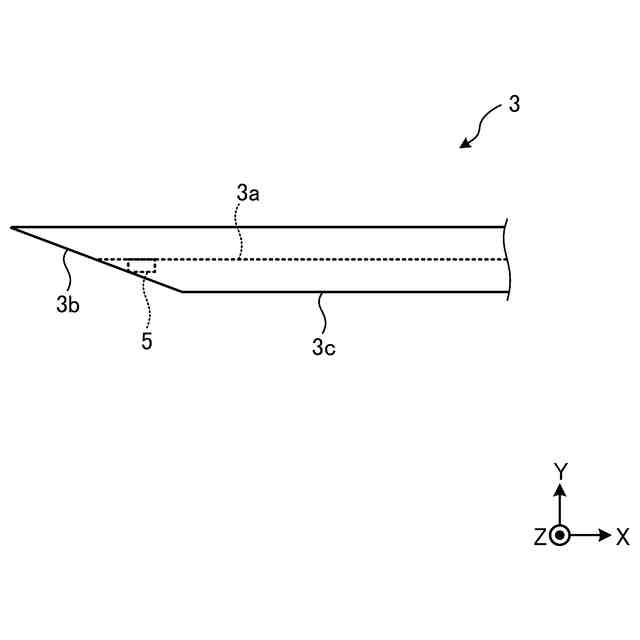
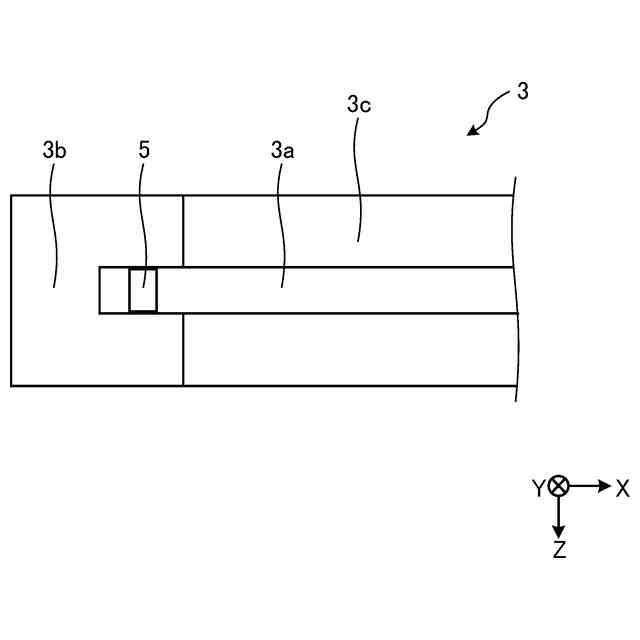
図2は、状況検出センサの設置例を示す図である。
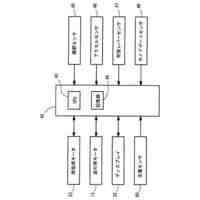
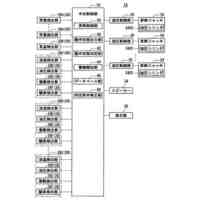
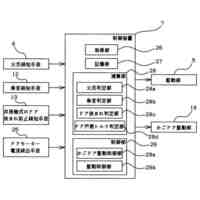
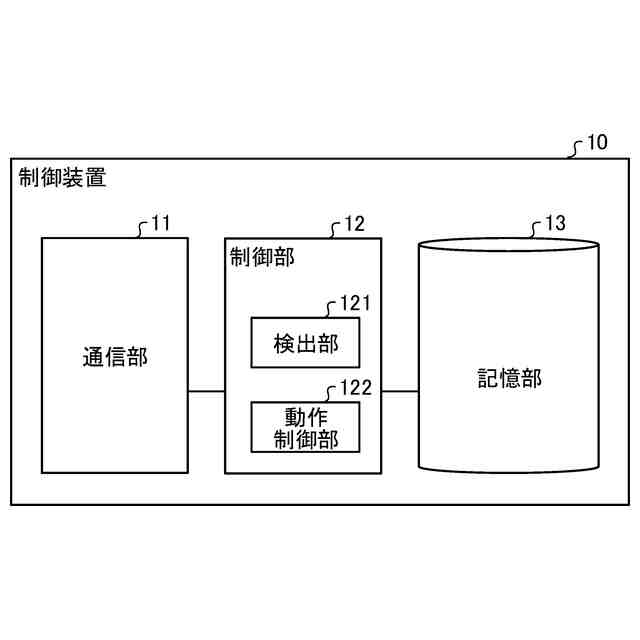
図3は、制御装置の機能構成例を示すブロック図である。
図4は、重量検出装置の機能構成例を示すブロック図である。
図5は、紐付情報の一例を示す図である。
図6は、実施形態に係る制御装置が実行する処理の処理手順を示すフローチャートである。
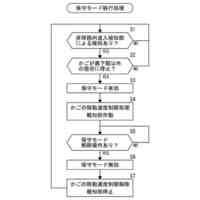
図7は、実施形態に係る重量検出装置が実行する処理の処理手順を示すフローチャートである。
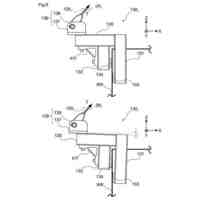
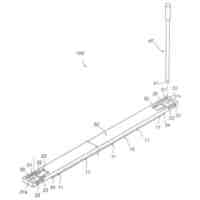
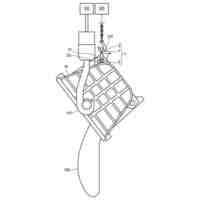
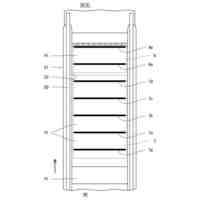
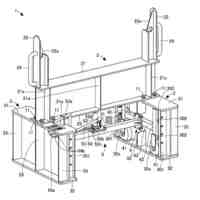
図8は、変形例に係る状況検出センサの設置例を示す図である。
図9は、変形例に係る状況検出センサの設置例を示す図である。
図10は、制御装置および/または重量検出装置として機能するコンピュータのハードウェア構成の一例を概略的に示す図である。
【発明を実施するための形態】
【0009】
以下、実施形態を通じて本発明を説明するが、以下の実施形態は特許請求の範囲に係る発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0010】
図1は、本実施形態に係るフォークリフト1の概略側面図である。図1に示すフォークリフト1は、概略図であり、説明の便宜上、一部の構成については省略している。なお、本開示で示すフォークリフト1は、自動制御により走行する。つまり、本開示で示すフォークリフト1は、無人による自動走行により積載物の運搬を行う。なお、フォークリフト1は、無人に限らず、有人による手動走行を行う構成であってもよい。あるいは、フォークリフト1は、無人モードと有人モードとを切り替え可能な構成であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ユニパルス株式会社
吊具
4か月前
ユニパルス株式会社
吊具
2日前
ユニパルス株式会社
吊具
4か月前
個人
高低間移動補助装置
10か月前
個人
吊りバケット装置
6か月前
ユニパルス株式会社
吊具装置
11か月前
ユニパルス株式会社
吊具装置
11か月前
株式会社豊田自動織機
荷役車両
2か月前
株式会社豊田自動織機
産業車両
7か月前
株式会社豊田自動織機
産業車両
10か月前
株式会社豊田自動織機
荷役車両
6か月前
株式会社豊田自動織機
荷役車両
2か月前
株式会社豊田自動織機
荷役車両
6か月前
株式会社フジタ
昇降装置
9か月前
株式会社豊田自動織機
荷役車両
3か月前
有限会社矢島製作所
ローダ
11か月前
株式会社ノセ技研
バケット
6か月前
ユニパルス株式会社
物品昇降装置
9か月前
ユニパルス株式会社
荷役助力装置
9か月前
株式会社アイセイ
搬送装置
8か月前
株式会社北川鉄工所
吊荷制御方法
3か月前
ユニパルス株式会社
荷役助力装置
1か月前
ダイコー興産株式会社
引掛具
11か月前
フジテック株式会社
エレベータ
4か月前
フジテック株式会社
エレベータ
5か月前
フジテック株式会社
エレベータ
4か月前
フジテック株式会社
エレベータ
10か月前
株式会社豊田自動織機
フォークリフト
8か月前
株式会社ニシキ
可変型吊り天秤
1か月前
大同特殊鋼株式会社
治具
2か月前
フジテック株式会社
乗客コンベア
11か月前
フジテック株式会社
乗客コンベア
9か月前
フジテック株式会社
乗客搬送装置
4か月前
フジテック株式会社
乗客コンベア
10か月前
ブラザー工業株式会社
架台
3日前
大和ハウス工業株式会社
可動架台
9か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ