TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024079477
公報種別
公開特許公報(A)
公開日
2024-06-11
出願番号
2022192451
出願日
2022-11-30
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
個人
,
個人
主分類
B25B
21/02 20060101AFI20240604BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ボルトやナットの緩みを適切に検出可能な作業機を提供する。
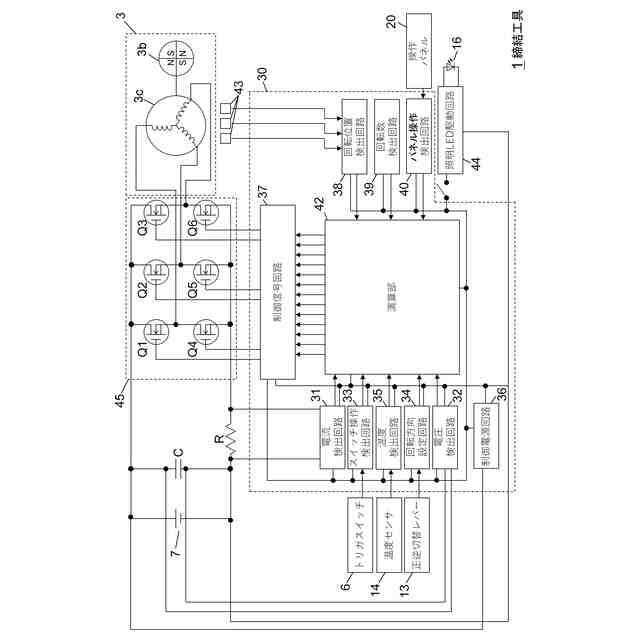
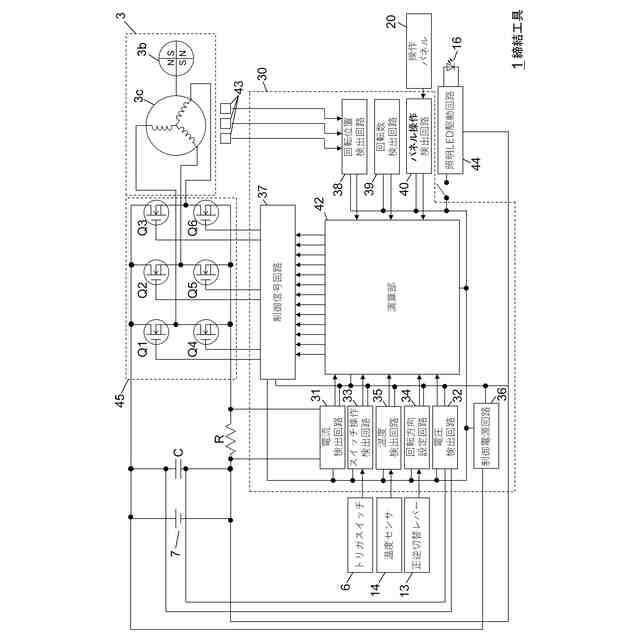
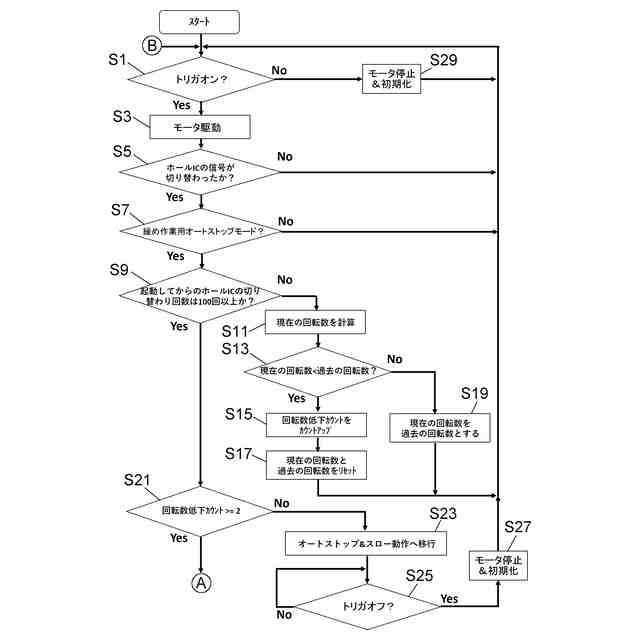
【解決手段】演算部42は、緩め作業用オートストップモードにおいて、トリガスイッチ6にモータ駆動操作が行われてからホールIC43の出力信号レベルの切り替わりがN回に達するまでの期間である第1期間にモータ3の回転数の低下が所定回数発生しなかった場合に、トリガスイッチ6にモータ駆動操作が行われていてもモータ3を減速または停止させる。演算部42は、第1期間に回転数の低下が所定回数発生した場合、トリガスイッチ6にモータ駆動操作が行われていればモータ3を減速および停止させない。
【選択図】図3
特許請求の範囲
【請求項1】
締結部材の緩め作業が可能な作業機であって、
モータと、
前記モータの駆動、停止を指示する操作部と、
先端工具を保持する先端工具装着部と、
前記モータにより駆動されて前記先端工具装着部を回転打撃する回転打撃機構と、
前記モータの回転に応じてレベルが切り替わる回転検出信号を出力する回転検出部と、
前記モータを制御する制御部と、を有し、
前記制御部は、前記操作部にモータ駆動操作が行われてから前記回転検出信号のレベルの切り替わりがN回に達するまでの期間である第1期間に前記回転数の低下が所定回数発生しなかった場合に、前記操作部に前記モータ駆動操作が行われていても前記モータを減速または停止させる第1モードを有する、
ことを特徴とする作業機。
続きを表示(約 950 文字)
【請求項2】
請求項1に記載の作業機であって、
前記制御部は、前記第1モードにおいて、前記第1期間に前記回転数の低下が前記所定回数発生した場合、前記操作部に前記モータ駆動操作が行われていれば前記モータ駆動操作に応じた前記モータの駆動を継続するよう構成される、
ことを特徴とする作業機。
【請求項3】
請求項1又は2に記載の作業機であって、
前記制御部は、前記第1期間に前記回転数の低下が前記所定回数発生しなくても、前記操作部に前記モータ駆動操作が行われていれば前記モータ駆動操作に応じた前記モータの駆動を継続する第2モードを有する、
ことを特徴とする作業機。
【請求項4】
請求項1又は2に記載の作業機であって、
前記第1モードは、締結部材の緩め作業用のオートストップモードである、
ことを特徴とする作業機。
【請求項5】
請求項1又は2に記載の作業機であって、
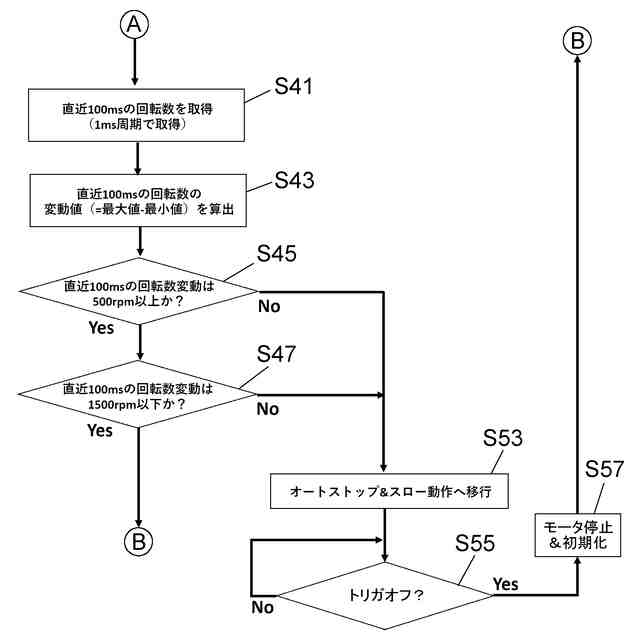
前記制御部は、前記第1モードにおいて、前記第1期間に前記回転数の低下が前記所定回数発生した場合、所定時間内における前記回転数の変動幅が所定値を超えると前記操作部に前記モータ駆動操作が行われていても前記モータを減速または停止させるよう構成される、
ことを特徴とする作業機。
【請求項6】
請求項1又は2に記載の作業機であって、
前記制御部は、前記操作部の操作量が大きいほど前記モータの回転数を高めるよう構成され、前記操作量が安定しているタイミングで前記回転数の低下が発生するか否かを判断する、
ことを特徴とする作業機。
【請求項7】
請求項1又は2に記載の作業機であって、
前記制御部は、前記操作部の操作量が大きいほど前記モータの回転数を高めるよう構成され、
前記N回は、前記操作部の操作量に関わらず一定である、
ことを特徴とする作業機。
【請求項8】
請求項1又は2に記載の作業機であって、
前記N回は、前記回転打撃機構による打撃が2回行われる回数であり、
前記所定回数は2回である、
ことを特徴とする作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
下記特許文献1は、ボルトやナットの着脱に使用する作業機を開示する。
【先行技術文献】
【特許文献】
【0003】
特開2011-067910号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
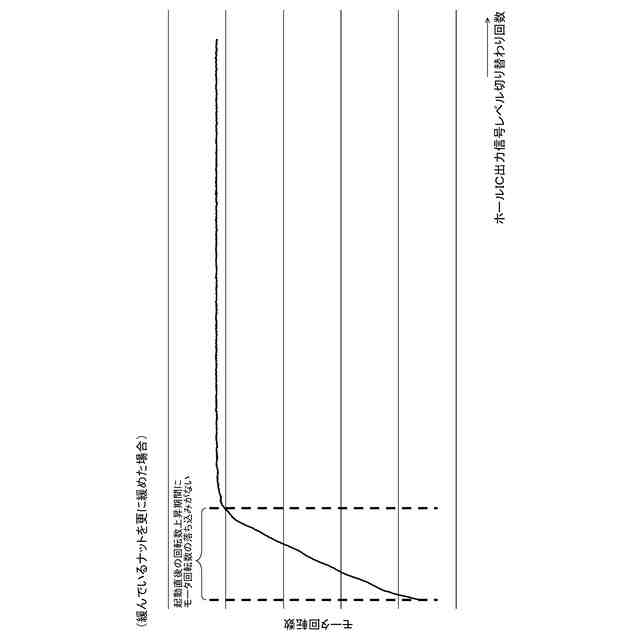
特許文献1のような作業機を元から緩んでいるボルトやナットに対して使用する場合、ボルトやナットの落下防止のためトリガ操作直後にモータを減速または停止させることが望ましく、そのためにはトリガ操作直後にボルトやナットの緩み検出を行う必要がある。ここで、本発明者は、トリガ操作から所定時間内におけるモータの回転数の増減の有無を判断基準にすると、ボルトやナットの緩みを適切に検出できない場合があることを見出した。
【0005】
本発明の目的は、ボルトやナットの緩みを適切に検出可能な作業機を提供することである。
【課題を解決するための手段】
【0006】
本発明のある態様は、締結部材の緩め作業が可能な作業機であって、
モータと、
前記モータの駆動、停止を指示する操作部と、
先端工具を保持する先端工具装着部と、
前記モータにより駆動されて前記先端工具装着部を回転打撃する回転打撃機構と、
前記モータの回転に応じてレベルが切り替わる回転検出信号を出力する回転検出部と、
前記モータを制御する制御部と、を有し、
前記制御部は、前記操作部にモータ駆動操作が行われてから前記回転検出信号のレベルの切り替わりがN回に達するまでの期間である第1期間に前記回転数の低下が所定回数発生しなかった場合に、前記操作部に前記モータ駆動操作が行われていても前記モータを減速または停止させる第1モードを有する。
【0007】
本発明は「電動作業機」や「電動工具」、「電気機器」等と表現されてもよく、そのように表現されたものも本発明の態様として有効である。
【発明の効果】
【0008】
本発明によれば、ボルトやナットの緩みを適切に検出可能な作業機を提供できる。
【図面の簡単な説明】
【0009】
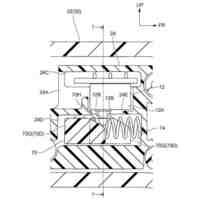
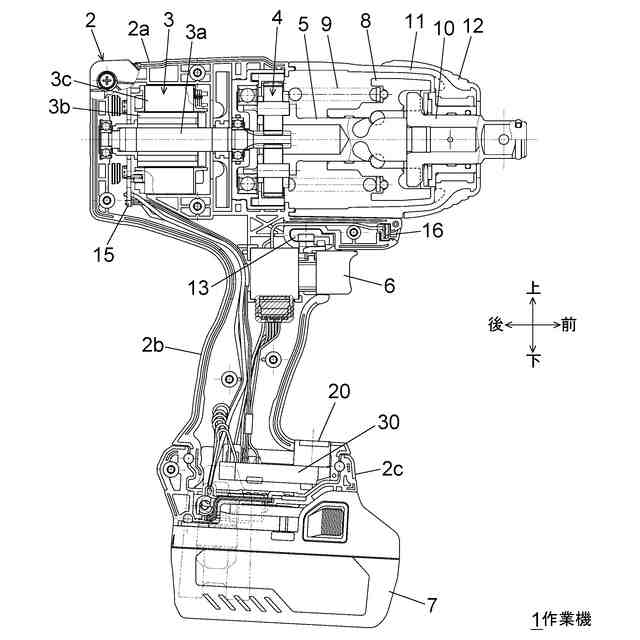
本発明の実施の形態に係る作業機1の側断面図。
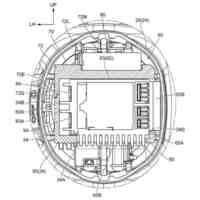
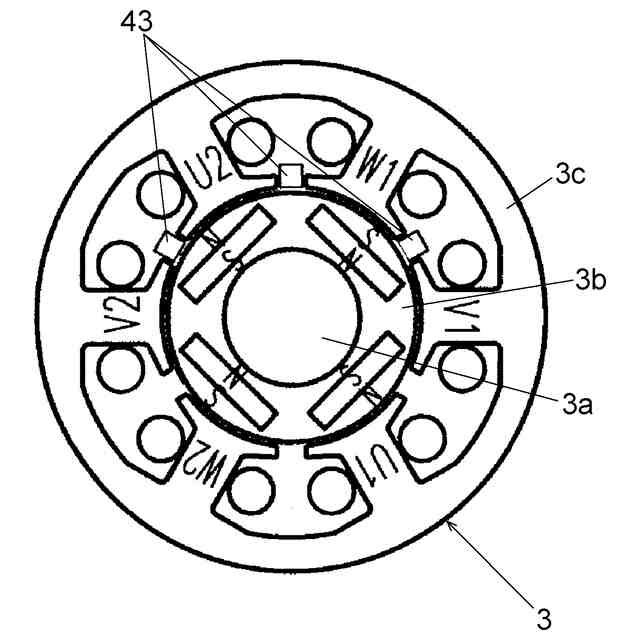
作業機1のモータ3の断面図。
作業機1の回路ブロック図。
緩んでいないナットを作業機1により通常モードで緩めた場合のモータ3の回転数の波形図。
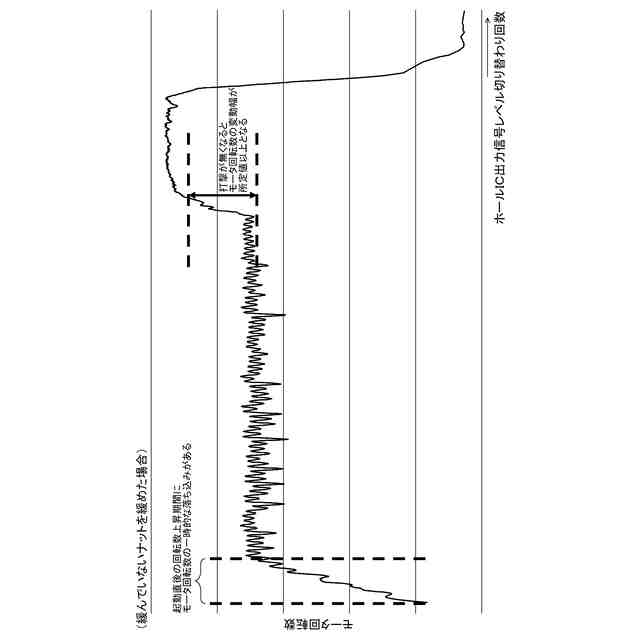
緩んでいるナットを作業機1により通常モードで更に緩めた場合のモータ3の回転数の波形図。
作業機1の制御フローチャート(前半)。
作業機1の制御フローチャート(後半)。
【発明を実施するための形態】
【0010】
図1は、本発明の実施の形態に係る作業機1の側断面図である。図1により、作業機1における互いに直交する前後、上下方向を定義する。前後方向は、作業機1のモータ軸3aと平行な方向である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
個人
ペットボトル用蓋開け具。
8か月前
株式会社ツノダ
挟持工具
3か月前
UTM株式会社
搬送装置
7か月前
株式会社右川ゴム製造所
把持装置
3か月前
日東工器株式会社
衝撃工具
8日前
川崎重工業株式会社
ハンド
4か月前
個人
ロボットシステム
6か月前
トヨタ自動車株式会社
関節機構
7か月前
トヨタ自動車株式会社
関節機構
6か月前
株式会社不二越
ロボット
6か月前
株式会社マキタ
動力工具
1か月前
川崎重工業株式会社
罫書用治具
25日前
学校法人立命館
ロボットハンド
4か月前
学校法人立命館
グリッパ
3か月前
個人
プーリーキー抜き治具
3か月前
トヨタ自動車株式会社
ハンド構造
15日前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
個人
作業台
7か月前
宮川工機株式会社
板状部品移動装置
1か月前
株式会社不二越
予測システム
4か月前
国立大学法人山形大学
二重関節機構
1か月前
CKD株式会社
電動把持装置
2か月前
東京都公立大学法人
ロボットハンド
1か月前
国立大学法人東北大学
剛性可変連結体
7か月前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
株式会社中村製作所
トルクドライバー
4か月前
工機ホールディングス株式会社
作業機
1か月前
個人
スロープバリビス-ビス&-ドライバー
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ