TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024072114
公報種別
公開特許公報(A)
公開日
2024-05-27
出願番号
2022182780
出願日
2022-11-15
発明の名称
干渉判別表示システム、干渉判別表示方法及び干渉判別表示プログラム
出願人
株式会社アマダ
代理人
弁理士法人きさらぎ国際特許事務所
主分類
B25J
13/08 20060101AFI20240520BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワーク保持用ロボットに対する干渉を正確に判別表示する。
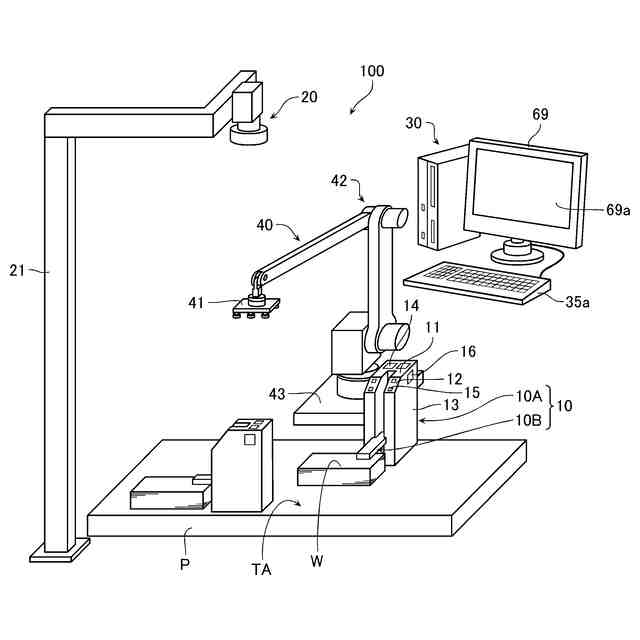
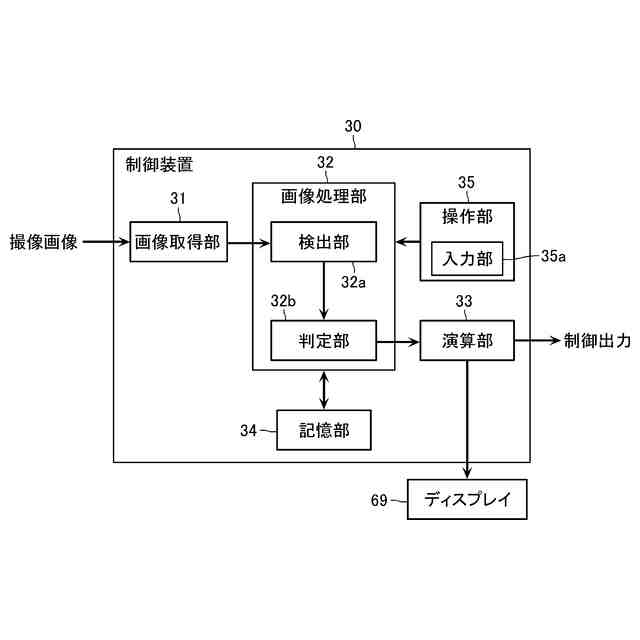
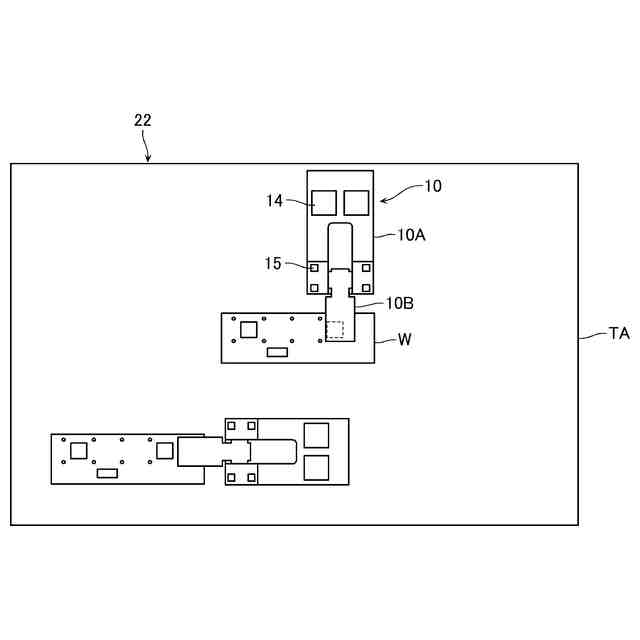
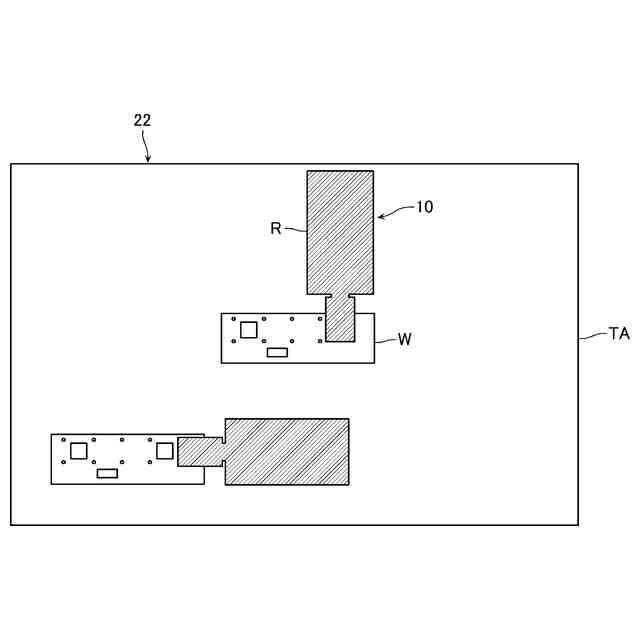
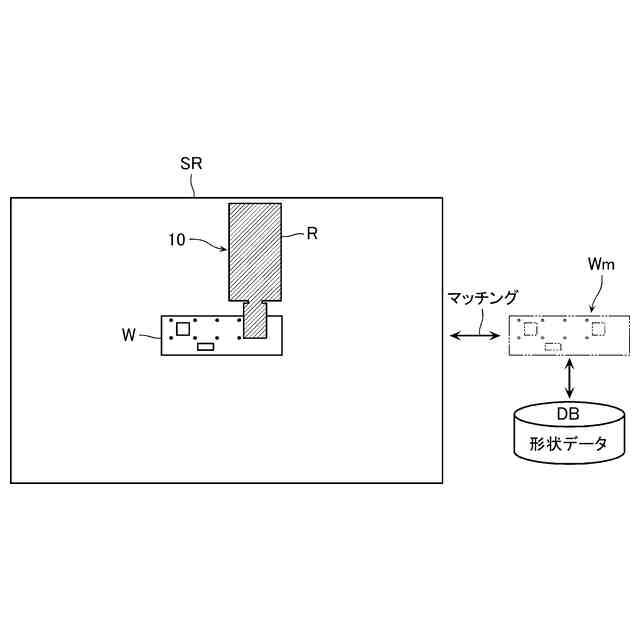
【解決手段】干渉判別表示システムは、積載エリア内に積載されたワークに対する作業を補助する配置自在な可搬性を有する補助装置と、積載エリア内のワークを保持するグリッパ及びアーム部を有するワーク保持用ロボットと、ワーク、補助装置並びにグリッパ及びアーム部が存在する積載エリアを撮像可能な撮像装置と、撮像画像に基づいて、積載エリア内における補助装置、ワーク並びにグリッパ及びアーム部をそれぞれ検出する制御装置と、検出された補助装置、ワーク並びにグリッパ及びアーム部をそれぞれ表示可能な表示装置と、を備え、制御装置は、グリッパ及びアーム部の少なくとも一つと、補助装置及びワークの少なくとも一つと、の干渉状態を判定する判定部を含み、表示装置は、判定された干渉状態を表す情報を表示画面上に表示可能に構成される。
【選択図】図1
特許請求の範囲
【請求項1】
積載エリア内に積載されたワークに対する作業を補助する配置自在な可搬性を有する補助装置と、
前記積載エリア内の前記ワークを保持するグリッパ及びアーム部を有するワーク保持用ロボットと、
前記ワーク、前記補助装置並びに前記グリッパ及び前記アーム部が存在する前記積載エリアを撮像可能な撮像装置と、
前記撮像装置によって撮像された撮像画像に基づいて、前記積載エリア内における前記補助装置、前記ワーク並びに前記グリッパ及び前記アーム部をそれぞれ検出する制御装置と、
前記制御装置によって検出された前記補助装置、前記ワーク並びに前記グリッパ及び前記アーム部をそれぞれ表示可能な表示装置と、を備え、
前記制御装置は、検出された前記グリッパ及び前記アーム部の少なくとも一つと、前記補助装置及び前記ワークの少なくとも一つと、の干渉状態を判定する判定部を含み、
前記表示装置は、前記制御装置の前記判定部によって判定された前記干渉状態を表す情報を表示画面上に表示可能に構成されている
干渉判別表示システム。
続きを表示(約 1,300 文字)
【請求項2】
前記表示装置は、前記干渉状態を表す情報を、前記グリッパ及び前記アーム部の少なくとも一つに対する前記補助装置及び前記ワークの少なくとも一つの干渉箇所が視認可能となるよう表示する
請求項1に記載の干渉判別表示システム。
【請求項3】
前記表示装置は、前記干渉箇所をその他の箇所と識別可能な特殊表示により表示する
請求項2に記載の干渉判別表示システム。
【請求項4】
前記表示装置は、前記干渉状態を表す情報を、前記グリッパ及び前記アーム部の少なくとも一つに対する前記補助装置及び前記ワークの少なくとも一つの干渉距離を表す数値情報として表示する
請求項1~3のいずれか1項に記載の干渉判別表示システム。
【請求項5】
前記表示装置は、前記干渉状態を回避する場合の前記補助装置の配置の向きを含む配置可能位置に関する情報を表示可能に構成されている
請求項1に記載の干渉判別表示システム。
【請求項6】
ワークが積載されると共に、前記ワークに対する作業を補助する配置自在な可搬性を有する補助装置の一部並びに前記ワークを保持するワーク保持用ロボットのグリッパ及びアーム部が前記ワーク上に配置された積載エリアを、撮像装置により撮像する工程と、
前記撮像装置によって撮像された撮像画像に基づいて、制御装置により前記積載エリア内における前記補助装置、前記ワーク並びに前記グリッパ及び前記アーム部をそれぞれ検出する工程と、
前記制御装置によって検出された前記グリッパ及び前記アーム部の少なくとも一つと、前記補助装置及び前記ワークの少なくとも一つと、の干渉状態を判定する工程と、
前記制御装置によって検出された前記補助装置、前記ワーク並びに前記グリッパ及び前記アーム部を表示装置によりそれぞれ表示する工程と、を備え、
前記表示する工程は、前記判定する工程で判定された前記干渉状態を表す情報を表示画面上に併せて表示する工程を含む
干渉判別表示方法。
【請求項7】
前記表示する工程では、前記干渉状態を表す情報を、前記グリッパ及び前記アーム部の少なくとも一つに対する前記補助装置及び前記ワークの少なくとも一つの干渉箇所が視認可能となるよう表示する
請求項6に記載の干渉判別表示方法。
【請求項8】
前記表示する工程では、前記干渉箇所をその他の箇所と識別可能な特殊表示により表示する
請求項7に記載の干渉判別表示方法。
【請求項9】
前記表示する工程では、前記干渉状態を表す情報を、前記グリッパ及び前記アーム部の少なくとも一つに対する前記補助装置及び前記ワークの少なくとも一つの干渉距離を表す数値情報として表示する
請求項6~8のいずれか1項に記載の干渉判別表示方法。
【請求項10】
前記表示する工程では、前記干渉状態を回避する場合の前記補助装置の配置の向きを含む配置可能位置に関する情報を表示する
請求項6に記載の干渉判別表示方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、干渉判別表示システム、干渉判別表示方法及び干渉判別表示プログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来から、積載エリアに積載した複数の板材等のワークを供給ロボット等のローディング装置によって、曲げ加工等を行うプレスブレーキ等の加工機へ供給することが行われている。例えば、ローディングに際しては、ワークを他のワークから分離する特許文献1に記載のワークめくり装置(1枚取り装置)が用いられる。
【0003】
また、積載エリア内に配置されているワークの位置は、特許文献2に記載のワーク検出装置によって検出することができる。そして、位置が検出されたワークを、配置位置及び配置の向きが判別されたワークめくり装置で1枚取りし、ワーク保持用ロボットのグリッパで1枚取りされたワークを保持して、加工機に搬送することが行われる。
【先行技術文献】
【特許文献】
【0004】
特開2022-120663号公報
特開2022-120664号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、例えば、積載エリアが広く複数箇所にワークが配置されワークめくり装置が設置されたような状況下では、グリッパを含むワーク保持用ロボットが1枚取りされたワークを保持しようとする際に、積載エリア内のワークめくり装置や積載されたワークの山に衝突して干渉が発生してしまうおそれがある。
【0006】
本発明の一態様は、ワーク保持用ロボットに対する干渉を正確に判別表示することができる干渉判別表示システム、干渉判別表示方法及び干渉判別表示プログラムである。
【課題を解決するための手段】
【0007】
本発明の一態様に係る干渉判別表示システムは、積載エリア内に積載されたワークに対する作業を補助する配置自在な可搬性を有する補助装置と、前記積載エリア内の前記ワークを保持するグリッパ及びアーム部を有するワーク保持用ロボットと、前記ワーク、前記補助装置並びに前記グリッパ及び前記アーム部が存在する前記積載エリアを撮像可能な撮像装置と、前記撮像装置によって撮像された撮像画像に基づいて、前記積載エリア内における前記補助装置、前記ワーク並びに前記グリッパ及び前記アーム部をそれぞれ検出する制御装置と、前記制御装置によって検出された前記補助装置、前記ワーク並びに前記グリッパ及び前記アーム部をそれぞれ表示可能な表示装置と、を備え、前記制御装置は、検出された前記グリッパ及び前記アーム部の少なくとも一つと、前記補助装置及び前記ワークの少なくとも一つと、の干渉状態を判定する判定部を含み、前記表示装置は、前記制御装置の前記判定部によって判定された前記干渉状態を表す情報を表示画面上に表示可能に構成されている。
【0008】
本発明の一態様に係る干渉判別表示方法は、ワークが積載されると共に、前記ワークに対する作業を補助する配置自在な可搬性を有する補助装置の一部並びに前記ワークを保持するワーク保持用ロボットのグリッパ及びアーム部が前記ワーク上に配置された積載エリアを、撮像装置により撮像する工程と、前記撮像装置によって撮像された撮像画像に基づいて、制御装置により前記積載エリア内における前記補助装置、前記ワーク並びに前記グリッパ及び前記アーム部をそれぞれ検出する工程と、前記制御装置によって検出された前記グリッパ及び前記アーム部の少なくとも一つと、前記補助装置及び前記ワークの少なくとも一つと、の干渉状態を判定する工程と、前記制御装置によって検出された前記補助装置、前記ワーク並びに前記グリッパ及び前記アーム部を表示装置により表示画面上にそれぞれ表示する工程と、を備え、前記表示する工程は、前記判定する工程で判定された前記干渉状態を表す情報を前記表示画面上に併せて表示する工程を含む。
【0009】
本発明の一態様に係る干渉判別表示プログラムは、ワークが積載されると共に、前記ワークに対する作業を補助する配置自在な可搬性を有する補助装置の一部並びに前記ワークを保持するワーク保持用ロボットのグリッパ及びアーム部が前記ワーク上に配置された積載エリアを、撮像装置により撮像させる処理と、前記撮像装置によって撮像された撮像画像に基づいて、制御装置により前記積載エリア内における前記補助装置、前記ワーク並びに前記グリッパ及び前記アーム部をそれぞれ検出させる処理と、前記制御装置によって検出された前記グリッパ及び前記アーム部の少なくとも一つと、前記補助装置及び前記ワークの少なくとも一つと、の干渉状態を判定させる処理と、前記制御装置によって検出された前記補助装置、前記ワーク並びに前記グリッパ及び前記アーム部を表示装置により表示画面上にそれぞれ表示させると共に、前記判定させる工程で判定された前記干渉状態を表す情報を前記表示装置により前記表示画面上に併せて表示させる処理と、をコンピュータに実行させる。
【0010】
本発明の一態様に係る干渉判別表示システム、干渉判別表示方法及び干渉判別表示プログラムによれば、ワークが積載され、補助装置の一部並びにワーク保持用ロボットのグリッパ及びアーム部がワーク上に配置された、これらが存在する積載エリアの撮像画像に基づき、積載エリア内における補助装置、ワーク並びにグリッパ及びアーム部をそれぞれ検出し、検出されたグリッパ及びアーム部の少なくとも一つと、補助装置及びワークの少なくとも一つと、の干渉状態を判定し、判定された干渉状態を表す情報を表示画面上に表示することができるので、ワーク保持用ロボットに対する干渉を正確に判別表示することができる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アマダ
割付データ作成装置及び割付データ作成方法
1日前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
3か月前
株式会社ツノダ
挟持工具
4か月前
株式会社右川ゴム製造所
把持装置
2か月前
川崎重工業株式会社
ハンド
4か月前
株式会社マキタ
動力工具
1か月前
学校法人立命館
グリッパ
3か月前
川崎重工業株式会社
罫書用治具
17日前
学校法人立命館
ロボットハンド
3か月前
個人
プーリーキー抜き治具
3か月前
株式会社ダイヘン
搬送装置
1か月前
トヨタ自動車株式会社
ハンド構造
7日前
株式会社ダイヘン
搬送装置
1か月前
東京都公立大学法人
ロボットハンド
1か月前
CKD株式会社
電動把持装置
1か月前
宮川工機株式会社
板状部品移動装置
1か月前
国立大学法人山形大学
二重関節機構
1か月前
株式会社不二越
予測システム
4か月前
工機ホールディングス株式会社
作業機
16日前
工機ホールディングス株式会社
作業機
16日前
工機ホールディングス株式会社
作業機
16日前
株式会社中村製作所
トルクドライバー
3か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
2か月前
株式会社ダイヘン
情報処理装置
2か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
2か月前
工機ホールディングス株式会社
作業機
1か月前
個人
スロープバリビス-ビス&-ドライバー
1か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社共和製作所
ロボット用アーム
2か月前
工機ホールディングス株式会社
作業機
4か月前
ミネベアミツミ株式会社
把持装置
21日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ