TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024068913
公報種別
公開特許公報(A)
公開日
2024-05-21
出願番号
2022179594
出願日
2022-11-09
発明の名称
運転支援装置及び車両
出願人
スズキ株式会社
代理人
弁理士法人東京国際特許事務所
主分類
B60W
30/182 20200101AFI20240514BHJP(車両一般)
要約
【課題】路面状況が安定的な高速道路のみならず、雪道や泥道などの一般道における路面状況や運転者の嗜好に応じた追従走行制御を発動する運転支援装置及び車両を提供する。
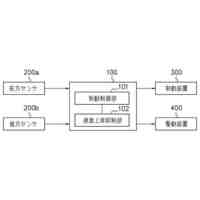
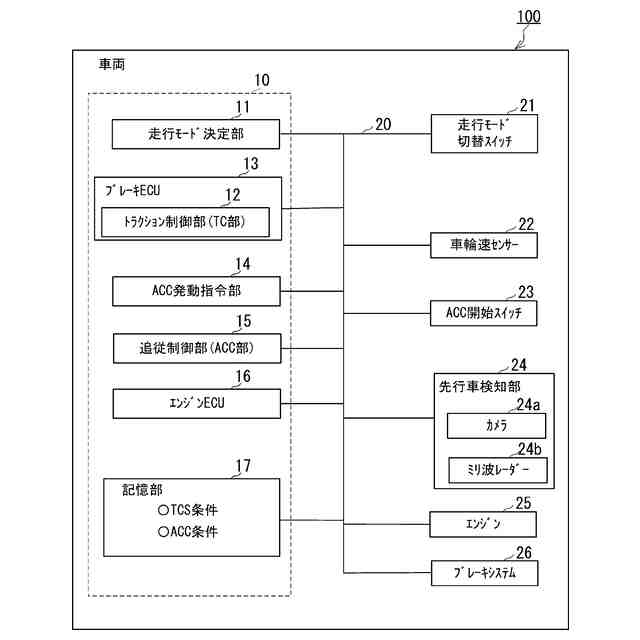
【解決手段】 運転支援装置10は、車両100の運転者による走行モードの選択に従い走行モードを決定する走行モード決定部11と、走行モード毎に規定されるトラクション制御条件に従って、駆動輪のスリップ量が介入閾値を超えた場合にエンジン25及びブレーキシステム26の少なくとも一方を制御して駆動輪のスリップを抑制するトラクション制御部12と、走行モード毎に規定される追従制御条件に従って、先行車に追従する追従走行を制御する追従走行制御部15と、を備え、追従走行制御部15は、走行モードが切り替えられた場合に切り替え後の走行モードで規定される追従制御条件に変更して追従走行を制御する。
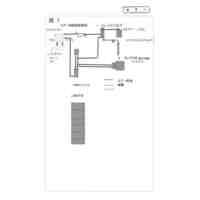
【選択図】 図1
特許請求の範囲
【請求項1】
車両の運転者による走行モードの選択に従い走行モードを決定する走行モード決定部と、
前記走行モード毎に規定されるトラクション制御条件に従って、駆動輪のスリップ量が介入閾値を超えた場合にエンジン及びブレーキシステムの少なくとも一方を制御して前記駆動輪のスリップを抑制するトラクション制御部と、
前記走行モード毎に規定される追従制御条件に従って先行車に追従する追従走行を制御する追従走行制御部と、を備え、
前記追従走行制御部は、前記走行モードが切り替えられた場合に切り替え後の前記走行モードで規定される前記追従制御条件に変更して前記追従走行を制御することを特徴とする運転支援装置。
続きを表示(約 1,600 文字)
【請求項2】
前記走行モードは、
前記トラクション制御条件で規定する前記介入閾値及びトラクション制御量の少なくとも一方及び前記追従制御条件で規定するエンジントルク及びブレーキ制動力の少なくとも一方がいずれもデフォルト値である第1のモードと、
前記第1のモードとは異なる前記トラクション制御条件を有する選択モードと、を含む請求項1に記載の運転支援装置。
【請求項3】
前記選択モードは、前記トラクション制御条件の前記ブレーキ制動力に対する前記介入閾値が前記第1のモードよりも小さく規定される第2のモードを含み、
前記第2のモードの前記追従制御条件において、
発進時の前記エンジントルク制御量は第1のモードより低く設定され、
所定の車速以上となったときの前記エンジントルクの上昇率は前記第1のモードより大きく設定される請求項2に記載の運転支援装置。
【請求項4】
前記第2のモードにおける前記追従制御条件において、
前記車両と先行車との車間距離は第1のモードよりも大きく設定され、
前記車両のブレーキシステムの作動タイミングは前記第1のモードよりも早く設定される請求項3に記載の運転支援装置。
【請求項5】
前記選択モードは、既定の車速以下の車速帯において、前記トラクション制御部による前記エンジンのトルクダウンが抑制または禁止され、かつ、前記トラクション制御条件の前記ブレーキ制動力が前記第1のモードより大きく設定される第3のモードを含み、
前記第3のモードの前記追従制御条件において、発進時の前記エンジントルクは前記第1のモードより大きく設定される請求項2に記載の運転支援装置。
【請求項6】
前記第3のモードでの前記追従制御中にスタックを検知した場合、前記エンジントルクを段階的に上昇させ、前記スタックの検知後所定時間を経過したとき前記追従制御を中止し、前記運転者による操作を報知する請求項5に記載の運転支援装置。
【請求項7】
前記選択モードは、前記トラクション制御部の前記介入閾値が前記第1のモードより大きく設定される第4のモードを含み、
前記エンジントルクの大きさ及び上昇率の少なくとも一方は前記第1のモードより大きく設定される請求項2に記載の運転支援装置。
【請求項8】
前記第3のモードの前記追従制御条件において、さらに発進時の前記エンジントルクが第1のモードよりも大きく設定され、
前記選択モードは、さらに前記トラクション制御部の前記介入閾値が前記第1のモードより大きく設定される第4のモードを含み、
前記追従制御条件における前記発進時の前記追従制御中の前記エンジントルクの大きさは、前記第3のモードの方が前記第4のモードより小さい請求項5に記載の車両の運転支援装置。
【請求項9】
車両の運転者に操作されて走行モードを切り替える走行モード切替スイッチと、
車輪の回転状態を監視する車輪センサーと、
前記走行モード毎に規定されるトラクション制御条件に従って、駆動輪のスリップ量が介入閾値を超えた場合にエンジン及びブレーキシステムの少なくとも一方を制御して前記駆動輪のスリップを抑制するトラクション制御部と、
前記車両の前方を走行する先行車を検知する先行車検知部と、
前記運転者に操作されて前記走行モード毎に規定される追従制御条件に従って前記先行車に追従する追従走行の発動指令を発信する追従走行開始スイッチと、
前記走行モードが切り替えられた場合に切り替え後の前記走行モードで規定される前記追従制御条件に変更して前記追従走行を制御する追従走行制御部と、を備えることを特徴とする車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の加減速を支援する運転支援技術に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年製造される車両の多くは、予め設定された車速内で車両が自動的に加減速して運転者による運転の支援をする追従走行制御(ACC:Adaptive Cruise Control)機能を搭載している。ACCは、イグニッション始動後に運転者のACCスイッチのON操作により起動する。その後、ACCは、走行中の運転者によるACCスイッチのON操作又はアクセル操作で発動し、ブレーキ操作で一時的に停止する。ACCによる走行態様は、各種車載センサーで検知される先行車の有無で異なる。先行車が検知されている場合、車両はACCの制御の下、先行車に所定の車間距離を維持して追従する。一方、先行車が検知されない場合、予め設定された車速まで加減速して走行する。ACCは、従来、高速道路などの自動車専用道路での使用が前提とされてきた。よって、従来は、走行モードが自動車専用道路での走行に適しているノーマルモードのときのみ、ACCの使用が推奨されてきた。
【先行技術文献】
【特許文献】
【0003】
特開2008-168722号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、近年では、自動運転技術の進歩により、一般道におけるACCの使用も想定されるようになってきた。よって、雪道や泥道などの路面状況及び運転者の嗜好にもACCを対応させることが求められるようになってきている。
【0005】
本発明はこのような事情を考慮してなされたもので、路面状況が安定的な高速道路のみならず、雪道や泥道などの一般道における路面状況や運転者の嗜好に応じた追従走行制御を発動する運転支援装置及び車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
本実施形態に係る運転支援装置は、車両の運転者による走行モードの選択に従い走行モードを決定する走行モード決定部と、前記走行モード毎に規定されるトラクション制御条件に従って、駆動輪のスリップ量が介入閾値を超えた場合にエンジン及びブレーキの少なくとも一方を制御して前記駆動輪のスリップを抑制するトラクション制御部と、前記走行モード毎に規定される追従制御条件に従って先行車に追従する追従走行を制御する追従走行制御部と、を備え、前記追従走行制御部は、前記走行モードが切り替えられた場合に切り替え後の前記走行モードで規定される前記追従制御条件に変更して前記追従走行を制御するものである。
【0007】
本実施形態に係る車両は、車両の運転者に操作されて走行モードを切り替える走行モード切替スイッチと、車輪の回転状態を監視する車輪センサーと、前記走行モード毎に規定されるトラクション制御条件に従って、駆動輪のスリップ量が介入閾値を超えた場合にエンジン及びブレーキの少なくとも一方を制御して前記駆動輪のスリップを抑制するトラクション制御部と、前記車両の前方を走行する先行車を検知する先行車検知部と、前記運転者に操作されて前記走行モード毎に規定される追従制御条件に従って前記先行車に追従する追従走行の発動指令を発信する追従走行開始スイッチと、前記走行モードが切り替えられた場合に切り替え後の前記走行モードで規定される前記追従制御条件に変更して前記追従走行を制御する追従走行制御部と、を備えるものである。
【発明の効果】
【0008】
本発明により、路面状況が安定的な高速道路のみならず、雪道や泥道などの一般道における路面状況や運転者の嗜好に応じた追従走行制御を発動する運転支援装置及び車両が提供される。
【図面の簡単な説明】
【0009】
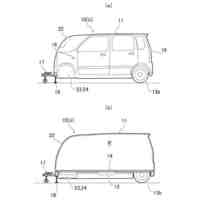
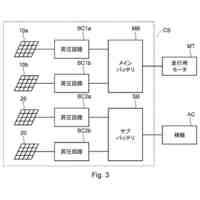
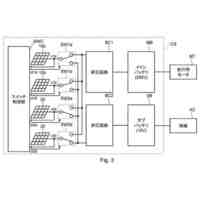
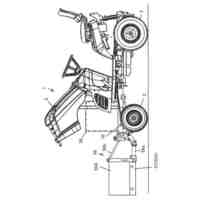
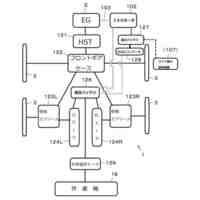
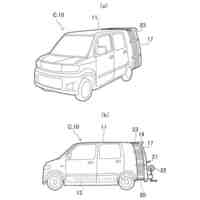
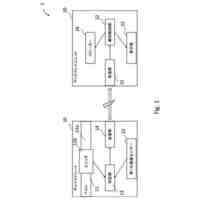
実施形態に係る運転支援装置を搭載した車両の概略構成図。
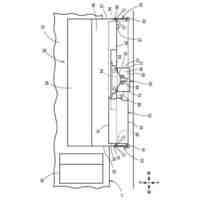
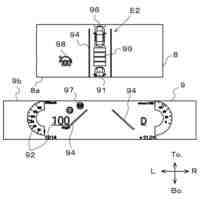
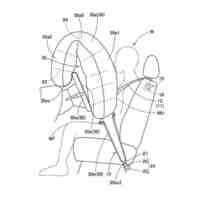
運転席から見たインストルメントパネル周辺部の概略図。
走行モード毎に規定されるACC条件及びTCS条件を表す図。
各走行モードにおける時間とエンジントルクとの関係を示す図。
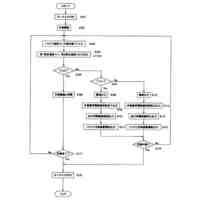
追従走行制御部による追従走行の発動及び一時禁止の態様を示すフローチャート。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態を添付図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両用エアー傘
1か月前
個人
電池交換式自動車
19日前
個人
車内雨傘載置収納具
3か月前
個人
自動車盗難防止装置
1か月前
個人
荷台雨除け装置
2か月前
個人
キャンピングトレーラー
2か月前
個人
連結式、キャンピングカー
24日前
個人
全自動解除式シートベルト
2か月前
株式会社豊田自動織機
電動車両
2か月前
日本精機株式会社
表示システム
3か月前
個人
移動手段のミラーカバー。
1か月前
トヨタ自動車株式会社
車両
3か月前
トヨタ自動車株式会社
車両
3か月前
トヨタ自動車株式会社
車両
3か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
個人
車両の座席装置
1か月前
株式会社コーワ
フィルター清掃装置
2か月前
ダイハツ工業株式会社
レバー
27日前
アピオ株式会社
荷物用支持具
1か月前
個人
テーブル付きハンドルガード具
2か月前
個人
セパレート型キャンピングカー
1か月前
個人
視認ペダル操作システム
2か月前
スズキ株式会社
車両制御装置
9日前
日本化薬株式会社
ガス発生器
1か月前
株式会社コーワ
フィルター清掃装置
2か月前
ダイハツ工業株式会社
車両構造
2か月前
オムロン株式会社
表示システム
3か月前
株式会社小糸製作所
車両用灯具
1か月前
ダイハツ工業株式会社
分解構造
19日前
株式会社JVCケンウッド
車両
1か月前
豊田合成株式会社
乗員保護装置
3か月前
三菱マヒンドラ農機株式会社
作業車両
24日前
豊田合成株式会社
乗員保護装置
3か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ