TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024060587
公報種別
公開特許公報(A)
公開日
2024-05-02
出願番号
2023175386
出願日
2023-10-10
発明の名称
自車両の後方および側方に位置する検出エリアにおいてターゲット物体を検出するための車両物体検出システムおよび方法
出願人
コンチネンタル・オートナマス・モビリティ・ジャーマニー・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング
,
トヨタ自動車株式会社
代理人
弁理士法人深見特許事務所
主分類
G06T
7/00 20170101AFI20240424BHJP(計算;計数)
要約
【課題】自車両の後方および/または側方に位置する検出エリアにおいてターゲット物体を検出するための車両物体検出システムおよび方法を提供する。
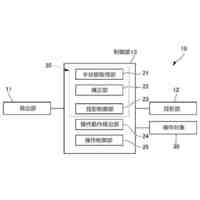
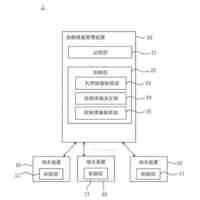
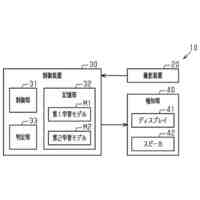
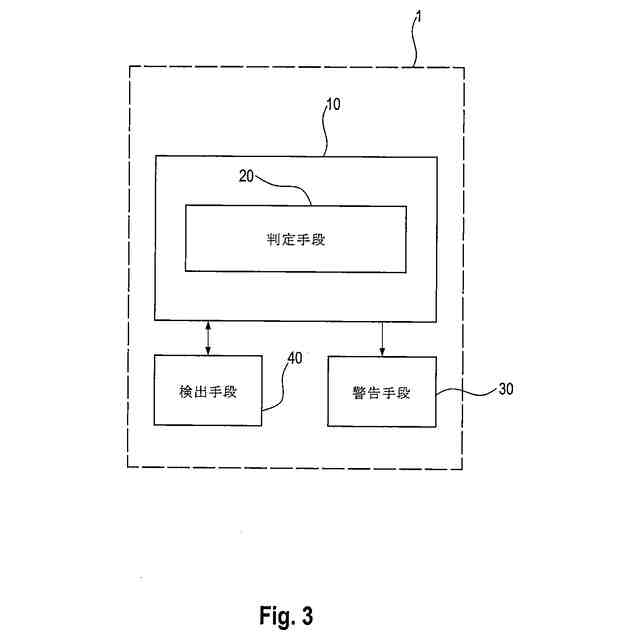
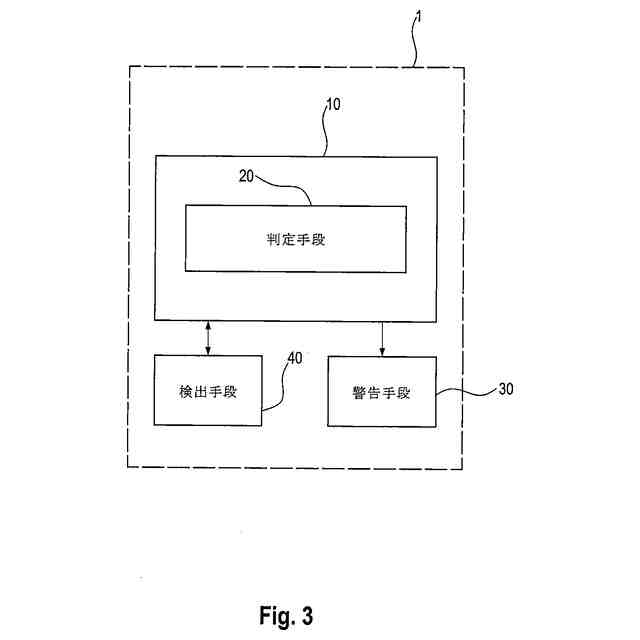
【解決手段】運転者支援システム1において、車両物体検出システム10は、自車両の運転者に警告を出力する警告手段30と、検出エリアにおいて検出されたターゲット物体が注意喚起物体であるか否かに関する判定を生成し、注意喚起物体であることを示す判定に基づいて警告手段30に判定を出力する判定手段20とを備え、判定手段20は、自車両の横方向における自車両に対するターゲット物体の相対速さとターゲット物体の絶対速さとの差と、指定範囲との比較または自車両の長手方向において、ターゲット物体の現在位置と運動パラメータを考慮することによって計算された、特定の時間の期間における検出エリア内でのターゲット物体の推定到着位置と、指定位置との比較、に基づいて判定を生成する。
【選択図】図3
特許請求の範囲
【請求項1】
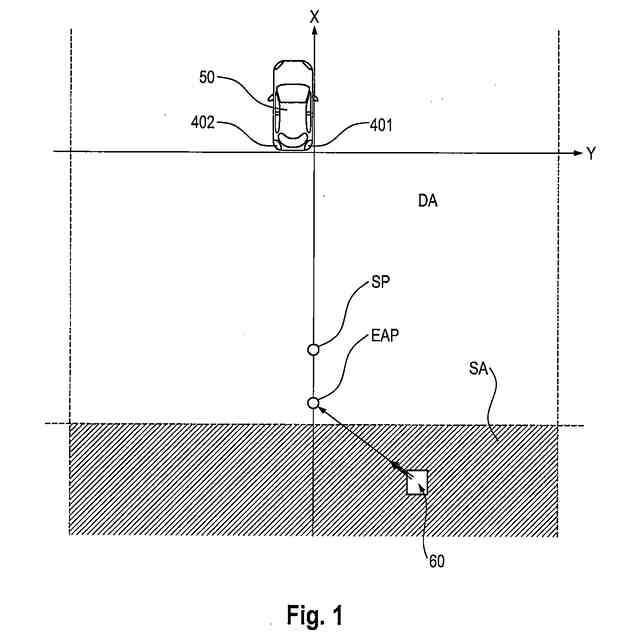
自車両(50)の後方および/または側方に位置する検出エリア(DA)においてターゲット物体(60)を検出するための車両物体検出システム(10)、好ましくは後方交差交通検出システムであって、前記車両物体検出システム(10)は、
前記検出エリア(DA)において検出されたターゲット物体(60)が注意喚起物体であるか否かに関する判定を生成し、前記ターゲット物体(60)が注意喚起物体であることを示す前記判定に基づいて前記自車両(50)の運転者に警告を出力するように構成された警告手段(30)に前記判定を出力するように構成された判定手段(20)を備え、
前記判定手段(20)は、
前記自車両(50)の横方向における前記自車両(50)に対する前記ターゲット物体(60)の相対速さと前記ターゲット物体(60)の絶対速さとの差と、指定範囲との比較と、
前記自車両(50)の長手方向において、前記ターゲット物体(60)の現在位置と前記ターゲット物体(60)の1つまたは複数の運動パラメータとを考慮することによって計算された、特定の時間の期間に前記検出エリア(DA)内で前記ターゲット物体(60)が到達すると推定される位置である、前記ターゲット物体(60)の推定到着位置(EAP)と、指定位置(SP)との比較と、
のうちの少なくとも1つに基づいて前記判定を生成するように構成される、車両物体検出システム(10)。
続きを表示(約 2,200 文字)
【請求項2】
前記判定手段は、前記自車両が後退すると検出されたことに応答して、前記検出エリア(DA)において検出された前記ターゲット物体(60)が注意喚起物体であるか否かに関する前記判定を生成するように構成される、請求項1に記載の車両物体検出システム(10)。
【請求項3】
前記判定手段(20)は、前記自車両(50)の前記横方向における前記自車両(50)に対する前記ターゲット物体(60)の前記相対速さと前記ターゲット物体(60)の前記絶対速さとの前記差が前記指定範囲内にあることに応答して、前記ターゲット物体が注意喚起物体でないと決定するように構成される、請求項1または2に記載の車両物体検出システム(10)。
【請求項4】
前記判定手段(20)は、前記推定到着位置(EAP)が、前記自車両(50)の前記長手方向に対する前記指定位置(SP)よりも前記自車両(50)の前記長手方向に対して前記自車両(50)から離れていることに応答して、前記ターゲット物体は注意喚起物体でないと決定するように構成される、請求項1~3のいずれか1項に記載の車両物体検出システム(10)。
【請求項5】
前記判定手段(20)は、前記自車両(50)に対する前記ターゲット物体(60)の現在検出された位置が、前記自車両(50)の後方のエリア内にあり、前記自車両(50)の前記長手方向において前記自車両(50)から所定の距離に位置し、かつ、前記検出エリア(DA)に含まれる指定エリア(SA)内にあることに応答して、前記ターゲット物体が注意喚起物体でないと決定するように構成される、請求項1~4のいずれか1項に記載の車両物体検出システム(10)。
【請求項6】
前記判定手段(20)は、前記自車両(50)が後退することに基づいて、複数の条件のうちの少なくとも2つの条件が充足されていることに基づき前記ターゲット物体(60)が注意喚起物体でないことを示す前記判定を生成するように構成され、前記複数の条件は、
(i)前記自車両(50)の前記横方向における前記自車両(50)に対する前記ターゲット物体(60)の前記相対速さと前記ターゲット物体(60)の前記絶対速さとの前記差が前記指定範囲内にあることと、
(ii)前記推定到着位置(EAP)が、前記自車両(50)の前記長手方向に対する前記指定位置(SP)よりも前記自車両(50)の前記長手方向に対して前記自車両(50)から離れていることと、
(iii)前記自車両(50)に対する前記ターゲット物体(60)の現在検出された位置が、前記自車両(50)の後方のエリア内にあり、前記自車両(50)の前記長手方向において前記自車両(50)から所定の距離に位置し、かつ、前記検出エリア(DA)に含まれる指定エリア(SA)内にあることと、を含む、請求項1~5のいずれか1項に記載の車両物体検出システム(10)。
【請求項7】
前記判定手段(20)は、前記自車両(50)が後退することに基づいて、前記検出エリア(DA)において検出された候補物体が、以下の1次条件を評価することによって前記ターゲット物体(60)が注意喚起物体であるか否かの前記判定に用いられるターゲット物体(60)とみなされるための候補であるか否かを判定するように構成され、前記1次条件は、
前記自車両が後退している間、前記検出エリア(DA)において検出された前記物体が前記自車両に接近していること、および/または
前記自車両と前記検出エリア(DA)において検出された前記物体との間の推定衝突時間が指定時間よりも小さいことである、請求項1~6のいずれか1項に記載の車両物体検出システム(10)。
【請求項8】
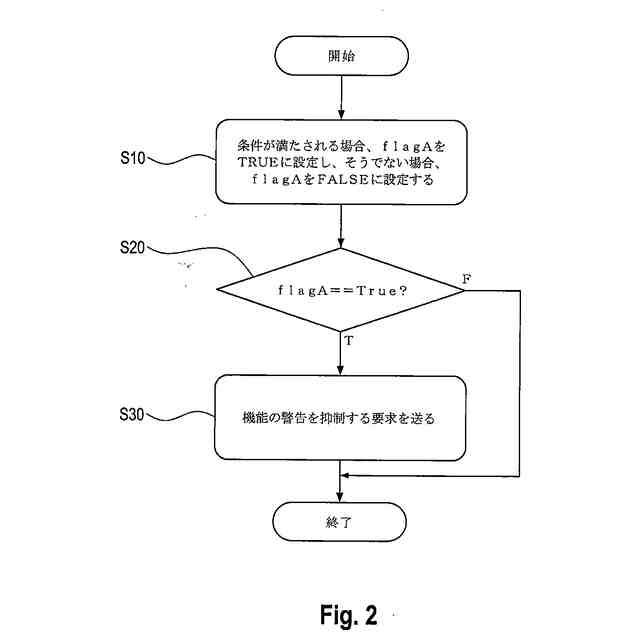
前記判定手段(20)は、前記ターゲット物体(60)が注意喚起物体でないことを示す前記判定を前記判定手段(20)が生成したことに基づいて、ターゲット物体が検出された場合でも警告を出力しないことを前記警告手段(30)に示す前記判定を前記警告手段(30)に出力するように構成される、先行する請求項のいずれか1項に記載の車両物体検出システム(10)。
【請求項9】
自車両(50)のための運転者支援システム(1)であって、
前記自車両(50)の後方および/または側方に位置する検出エリア(DA)においてターゲット物体(60)を検出するように構成された検出手段(40)と、
請求項1~8のいずれか1項に記載の車両物体検出システム(10)と、
前記ターゲット物体(60)が注意喚起物体であることを示す前記判定を前記車両物体検出システム(10)の前記判定手段(20)が生成したことに基づいて、ターゲット物体(60)が前記検出エリア(DA)に存在することを前記自車両の運転者に警告するように構成された警告手段(30)と、を備える、運転者支援システム(1)。
【請求項10】
前記検出手段(40)は、前記検出エリア(DA)においてターゲット物体(60)を検出するように構成された少なくとも2つのセンサ(401、402)、好ましくは2つの短距離レーダセンサのような少なくとも2つのレーダセンサを備える、請求項9に記載の運転者支援システム(1)。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
技術分野
本発明は、自車両の後方および/または側方に位置する検出エリアにおいて車両のようなターゲット物体(以下、「ターゲット車両」ともいう)を検出するための車両物体検出システム、好ましくは後方交差交通検出システムに関する。
続きを表示(約 1,600 文字)
【0002】
さらに、本発明は、特にそのような車両物体検出システムを制御するための、自車両の後方および/または側方に位置する検出エリアにおいてターゲット車両のようなターゲット物体を検出するためのコンピュータ実施方法に関する。
【0003】
さらに、本発明は、そのような車両物体検出システムを備える車両のための運転者支援システムと、コンピュータ実施方法を実行するための対応するコンピュータプログラムと、それぞれの非一時的コンピュータ可読媒体とに関する。
【背景技術】
【0004】
背景
車両用の従来の運転者支援システムまたは先進運転者支援システム(ADAS:Advanced Driver Assistance Systems)は、例えば、従来の車両ならびに自動運転車両に関連して広く用いられており、通常、そのような車両物体検出システムを備える。
【0005】
多くの車両事故は、そのような先進運転者支援システムによって回避されたかもしれないヒューマンエラーによって引き起こされる。一般的に知られているセーフティクリティカルADAS用途は、例えば、歩行者検出/回避、車線逸脱警告/修正、交通標識認識、自動緊急ブレーキ、(後方)交差交通注意喚起および死角検出(BSD:blind spot detection)を含む。
【0006】
(後方)交差交通注意喚起に関連して、それぞれの後方交差交通注意喚起(RCTA:rear cross traffic alert)システムは、死角内の車両を検出するために用いられるもの(BSD)と同じレーダインフラストラクチャのような検出手段を用いることが多い。
【0007】
例えば、長距離レーダ/長距離レーダセンサは、通常、緊急ブレーキ支援および適応走行制御のような用途に用いられるが、短距離レーダは、例えば、死角検出(BSD)、後方交差交通注意喚起、車線変更支援および後方プリクラッシュシステムのような用途に関連して用いられることが多い。
【0008】
(後方)交差交通注意喚起に関連して、従来の後方交差交通注意喚起(RCTA)システムは、死角内の車両または物体を検出するためのレーダセンサのようなレーダインフラストラクチャ(死角検出、BSD)を用いて、駐車スペースからバックするとき、すなわち自車両が後退するときの事故を回避するのに役立つことができる。
【0009】
可能性のある衝突または危険状況の場合、後方交通接近通知(RTAN:rear traffic approaching notification)は、視覚または音響インジケータによって自車両の運転者にRCTAシステムによって出力されてもよく、この通知は通常、車両物体検出システムによって実装される後方接近ターゲット通知システム(RTANシステム)によって出力される。
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、このようなシステムでは、いわゆる衝突余裕時間(TTC:Time To Collision)および衝突危険エリアの横断予測に基づいて、後退している自車両と、自車両の後方および/または側方に位置する、すなわち自車両の側方から後方で接近してくるターゲット物体との衝突または危険状況の可能性を決定する機能を提供するという問題がある。これにより、ターゲット物体が自車両から遠く離れていても警告を出力するため、警告出力が不要となる場合がある。すなわち、自車両の運転者に対して、自車両に危険をもたらさない遠方の移動物体/ターゲット物体の接近を警告するための警告が起動されて出力される。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
乗降調査装置
1か月前
個人
管理装置
25日前
個人
プロジェクター
20日前
個人
暗号化記憶媒体
4日前
個人
自動販売機
1か月前
日本精機株式会社
投影装置
1か月前
日本精機株式会社
投影システム
1か月前
キヤノン電子株式会社
周辺機器
12日前
個人
求人マッチングサーバ
12日前
株式会社SUBARU
車両
1か月前
小林クリエイト株式会社
RFタグ
1か月前
カゴメ株式会社
営農支援プログラム
11日前
株式会社協同印刷
防災・災害マウス
1か月前
17LIVE株式会社
サーバ
1か月前
カゴメ株式会社
営農支援プログラム
11日前
カゴメ株式会社
営農支援プログラム
11日前
カゴメ株式会社
営農支援プログラム
11日前
株式会社ゼロボード
価格決定システム
1か月前
太陽誘電株式会社
触覚生成装置
1か月前
アスエネ株式会社
水管理の方法
12日前
株式会社ワコム
電子ペン
7日前
株式会社ワコム
電子ペン
5日前
トヨタ自動車株式会社
検査装置
25日前
株式会社NGA
画像投稿システム
25日前
株式会社イトーキ
分析装置
1か月前
株式会社寺岡精工
システム
7日前
大日本印刷株式会社
作業台
10日前
株式会社アジラ
姿勢推定システム
1か月前
CKD株式会社
遠隔支援システム
12日前
トヨタ紡織株式会社
検査装置
今日
個人
ポイント増量アプリ「太陽光銭サー」
19日前
BH株式会社
商品販売システム
12日前
株式会社小野測器
移動量計測システム
14日前
株式会社三富
取引管理システム
20日前
株式会社アジラ
異常行動検出システム
今日
株式会社小野測器
移動量計測システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ