TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024059927
公報種別
公開特許公報(A)
公開日
2024-05-01
出願番号
2024030919,2021018697
出願日
2024-03-01,2021-02-09
発明の名称
画像処理方法および装置、並びにプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G06V
10/70 20220101AFI20240423BHJP(計算;計数)
要約
【課題】ぼけの発生した撮像画像に対する機械学習モデルを用いた認識または回帰のタスクにおいて、輝度飽和による精度低下を抑制可能な画像処理方法を提供する。
【解決手段】画像処理方法は、撮像画像を取得する第1の工程(S201)と、機械学習モデルを用いて、撮像画像に基づき、第1のマップを生成する第2の工程(S202)とを有し、第1のマップは、撮像画像の輝度飽和領域の被写体が、撮像画像の撮像過程で発生したぼけによって広がった領域の信号値の大きさと範囲を表すマップである。
【選択図】図7
特許請求の範囲
【請求項1】
撮像により得られた撮像画像を取得する工程と、
前記撮像画像に基づき第1のマップを生成し、該撮像画像及び該第1のマップに基づきモデル出力を生成する工程とを有し、
前記第1のマップは、前記撮像画像の輝度飽和領域における被写体が前記撮像において発生したぼけによって広がった領域を表すことを特徴とする画像処理方法。
続きを表示(約 980 文字)
【請求項2】
撮像により得られた撮像画像を取得する工程と、
前記撮像画像に基づき第1の特徴マップを生成し、該第1の特徴マップに基づき第1のマップとモデル出力とを生成する工程とを有し、
前記第1のマップは、前記撮像画像の輝度飽和領域における被写体が前記撮像において発生したぼけによって広がった領域を表すことを特徴とする画像処理方法。
【請求項3】
前記第1の特徴マップは、前記撮像画像の輝度飽和の影響を受けた領域とそれ以外の領域を切り分けるための情報が含まれていることを特徴とする請求項2に記載の画像処理方法。
【請求項4】
前記第1の特徴マップは、機械学習モデルを用いて生成されることを特徴とする請求項2または3に記載の画像処理方法。
【請求項5】
前記第1のマップは、機械学習モデルを用いて生成されることを特徴とする請求項1乃至4のいずれか一項に記載の画像処理方法。
【請求項6】
前記第1のマップは、前記輝度飽和領域を表す第2のマップに基づいて、生成されることを特徴する請求項1乃至5のいずれか一項に記載の画像処理方法。
【請求項7】
前記モデル出力は、前記撮像画像に対応する認識ラベルまたは信号列の少なくとも一方を含むことを特徴とする請求項1乃至6のいずれか一項に記載の画像処理方法。
【請求項8】
前記モデル出力は、先鋭化された前記撮像画像、前記ぼけとは異なるぼけを有する画像、及び前記撮像画像に対応する被写体空間のデプスマップのうち少なくとも一つを含むことを特徴とする請求項1乃至7のいずれか一項に記載の画像処理方法。
【請求項9】
前記撮像画像に基づいて前記第1のマップを生成する際に実行される線型和の回数は、前記撮像画像に基づいて前記モデル出力を生成する際に実行される線型和の回数以下であることを特徴とする請求項1乃至8のいずれか一項に記載の画像処理方法。
【請求項10】
前記第1のマップに基づいて、前記撮像画像と前記モデル出力とを合成することで出力画像を生成する工程を更に有することを特徴とする請求項1乃至9のいずれか一項に記載の画像処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ぼけの発生した画像に対して、機械学習モデルを用いた認識または回帰のタスクを実行する画像処理方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
非特許文献1には、機械学習モデルの1つである畳み込みニューラルネットワーク(CNN:Convolutional Neural Network)を用いて、撮像画像のぼけを先鋭化する方法が開示されている。撮像画像の輝度飽和値以上の信号値を有する画像をぼかすことで訓練データセットを生成し、訓練データセットでCNNを訓練することで、輝度飽和領域の周辺でも弊害を抑制して、ぼけ先鋭化を行うことができる。
【先行技術文献】
【非特許文献】
【0003】
Li Xu,et al.,Deep Convolutional Neural Network for Image Deconvolution,Advances in Neural Information Processing Systems 27,NIPS2014
【発明の概要】
【発明が解決しようとする課題】
【0004】
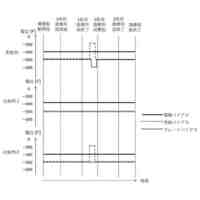
しかし、非特許文献1に開示された方法では、輝度飽和と無関係な位置の被写体にアーティファクト(偽構造)が発生する可能性がある。アーティファクトとは、具体的には、実際の被写体の構造とは異なる局所的な信号値の減少または増大である。なお、アーティファクトとその発生理由の詳細については後述する。ぼけ先鋭化以外のぼけが発生した画像に対するタスクにおいても、同様に輝度飽和の影響によってタスクの精度が低下する。
【0005】
そこで本発明は、ぼけの発生した画像に対する機械学習を用いた認識または回帰のタスクにおいて、輝度飽和によるタスクの精度低下を抑制することが可能な画像処理方法などを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一側面としての画像処理方法は、撮像により得られた撮像画像を取得する工程と、前記撮像画像に基づき第1のマップを生成する工程と、前記機械学習モデルを用いて、前記撮像画像及び前記第1のマップに基づきモデル出力を生成する工程とを有し、前記第1のマップは、前記撮像画像の輝度飽和領域における被写体が前記撮像において発生したぼけによって広がった領域である。
【0007】
本発明の他の目的及び特徴は、以下の実施例において説明される。
【発明の効果】
【0008】
本発明によれば、ぼけの発生した画像に対する機械学習を用いた認識または回帰のタスクにおいて、輝度飽和によるタスクの精度低下を抑制することが可能な画像処理方法などを提供することができる。
【図面の簡単な説明】
【0009】
実施例1における機械学習モデルの構成図である。
実施例1乃至3における被写体と撮像画像との関係、および第1のマップの説明図である。
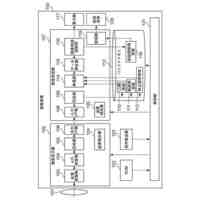
実施例1における画像処理システムのブロック図である。
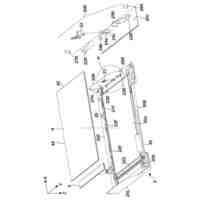
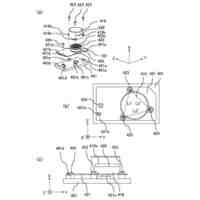
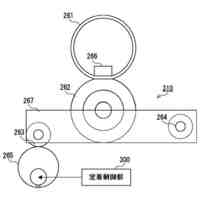
実施例1における画像処理システムの外観図である。
実施例1におけるアーティファクトの説明図である。
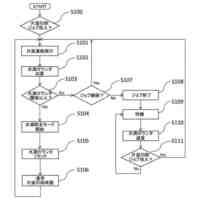
実施例1乃至3における機械学習モデルの訓練のフローチャートである。
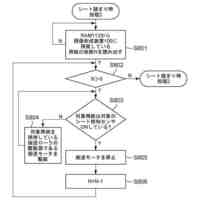
実施例1、2におけるモデル出力の生成のフローチャートである。
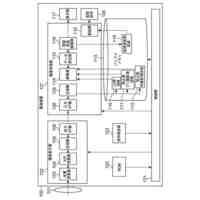
実施例2における画像処理システムのブロック図である。
実施例2における画像処理システムの外観図である。
実施例2における機械学習モデルの構成図である。
実施例3における画像処理システムのブロック図である。
実施例3における画像処理システムの外観図である。
実施例3における機械学習モデルの構成図である。
実施例3におけるモデル出力の生成のフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施例について、図面を参照しながら詳細に説明する。各図において、同一の部材については同一の参照符号を付し、重複する説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
成形体
12日前
キヤノン株式会社
定着装置
5日前
キヤノン株式会社
記録装置
8日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
記録装置
13日前
キヤノン株式会社
読取装置
12日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
定着装置
12日前
キヤノン株式会社
光走査装置
5日前
キヤノン株式会社
露光ヘッド
5日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像読取装置
8日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
定着用回転体
9日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ