TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024058738
公報種別
公開特許公報(A)
公開日
2024-04-30
出願番号
2022166019
出願日
2022-10-17
発明の名称
撮像装置の制御装置、方法及びプログラム
出願人
キヤノン株式会社
代理人
個人
主分類
G03B
17/56 20210101AFI20240422BHJP(写真;映画;光波以外の波を使用する類似技術;電子写真;ホログラフイ)
要約
【課題】フォーカス処理を含むショット動作を、適切なフォーカス処理を実行しつつ、指定時間で完了させられるようにする。
【解決手段】撮影領域を可変にする駆動部(107、110、111)を備えた撮像装置を制御する制御装置であって、駆動部(107、110、111)の目標位置を取得する第1の取得手段(118)と、駆動部(107、110、111)を目標位置に移動させるとともに、フォーカス処理を実行する時間として設定された指定時間を取得する第2の取得手段(118)と、撮像装置が備える測光手段の測光結果に基づいて、フォーカス処理に要する時間であるフォーカス処理時間を決定する決定手段(118)と、指定時間とフォーカス処理時間とに基づいて、駆動部(107、110、111)を目標位置に移動させるための移動時間を算出する演算手段(118)とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
撮影領域を可変にする駆動部を備えた撮像装置を制御する制御装置であって、
前記駆動部の目標位置を取得する第1の取得手段と、
前記駆動部を前記目標位置に移動させるとともに、フォーカス処理を実行する時間として設定された指定時間を取得する第2の取得手段と、
前記撮像装置が備える測光手段の測光結果に基づいて、前記フォーカス処理に要する時間であるフォーカス処理時間を決定する決定手段と、
前記指定時間と前記フォーカス処理時間とに基づいて、前記駆動部を前記目標位置に移動させるための移動時間を算出する演算手段とを備えたことを特徴とする撮像装置の制御装置。
続きを表示(約 1,500 文字)
【請求項2】
前記移動時間で前記駆動部を前記目標位置に移動させた後、前記フォーカス処理を実行するように制御する制御手段を備えたことを特徴とする請求項1に記載の撮像装置の制御装置。
【請求項3】
前記撮像装置は、前記駆動部として、パン駆動部、チルト駆動部、及びズーム駆動部を備え、
前記目標位置は、前記パン駆動部の目標位置、前記チルト駆動部の目標位置、及び前記ズーム駆動部の目標位置であることを特徴とする請求項1又は2に記載の撮像装置の制御装置。
【請求項4】
前記演算手段は、前記パン駆動部の前記目標位置、前記チルト駆動部の前記目標位置、及び前記ズーム駆動部の前記目標位置と、前記パン駆動部の現在位置、前記チルト駆動部の現在位置、及び前記ズーム駆動部の現在位置と、前記移動時間とに基づいて、前記パン駆動部、前記チルト駆動部、及び前記ズーム駆動部の駆動を同時に開始し、同時に終了する前記パン駆動部の移動速度、前記チルト駆動部の移動速度、及び前記ズーム駆動部の移動速度を算出することを特徴とする請求項3に記載の撮像装置の制御装置。
【請求項5】
前記撮像装置は、前記フォーカス処理として、コントラストオートフォーカスを実行することを特徴とする請求項1又は2に記載の撮像装置の制御装置。
【請求項6】
前記撮像装置は、前記フォーカス処理として、複数の方式のフォーカス処理を実行可能であり、
前記決定手段は、前記測光手段の測光結果に基づいて、前記複数の方式のフォーカス処理からフォーカス処理を選択した上で、前記フォーカス処理時間を決定することを特徴とする請求項1又は2に記載の撮像装置の制御装置。
【請求項7】
前記撮像装置は、前記フォーカス処理として、位相差オートフォーカスと、コントラストオートフォーカスとを実行可能であり、
前記決定手段は、前記測光手段の測光結果が明るい環境下であることを示すとき、位相差オートフォーカスを選択した上で、前記フォーカス処理時間を決定することを特徴とする請求項6に記載の撮像装置の制御装置。
【請求項8】
撮影領域を可変にする駆動部を備えた撮像装置を制御する制御方法であって、
前記駆動部の目標位置を取得するステップと、
前記駆動部を前記目標位置に移動させるとともに、フォーカス処理を実行する時間として設定された指定時間を取得するステップと、
前記撮像装置が備える測光手段の測光結果に基づいて、前記フォーカス処理に要する時間であるフォーカス処理時間を決定するステップと、
前記指定時間と前記フォーカス処理時間とに基づいて、前記駆動部を前記目標位置に移動させるための移動時間を算出するステップとを有することを特徴とする撮像装置の制御方法。
【請求項9】
撮影領域を可変にする駆動部を備えた撮像装置を制御するためのプログラムであって、
前記駆動部の目標位置を取得する処理と、
前記駆動部を前記目標位置に移動させるとともに、フォーカス処理を実行する時間として設定された指定時間を取得する処理と、
前記撮像装置が備える測光手段の測光結果に基づいて、前記フォーカス処理に要する時間であるフォーカス処理時間を決定する処理と、
前記指定時間と前記フォーカス処理時間とに基づいて、前記駆動部を前記目標位置に移動させるための移動時間を算出する処理とをコンピュータに実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ネットワークカメラ等の撮像装置の制御装置、方法及びプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
ネットワークカメラ等の撮像装置において、プリセットされた位置にパン、チルト、ズームそれぞれの駆動部を移動させる、ショット動作と呼ばれる機能を持つものがある。また、ショット動作において、フォーカス処理を実行するものがある。この場合、ショット動作の開始の指示を受けると、パン、チルト、ズームそれぞれの駆動部の駆動を同時に開始し、同時に終了するように制御して、その後、フォーカス処理を実行する流れとなる。
ショット動作では、指定時間で完了させることが求められる。しかしながら、フォーカス処理を含むショット動作では、フォーカス処理に要する時間は、環境の明るさによって変動することがあり、指定時間でショット動作を完了させられないケースが生じる。
【0003】
特許文献1には、現在位置から目的位置までの移動時間を指定し、その指定時間と、パン、チルト、ズーム、フォーカスなどの移動部材のそれぞれの移動距離から最適な移動速度を算出することで、同時駆動、同時終了させるようにすることが開示されている。
しかしながら、特許文献1のようにフォーカスの移動部材を目的位置まで移動させる処理では、被写体が移動する場合、ピント外れが生じることがあり、必ずしも適切なフォーカス処理にはならない。例えばネットワークカメラ等では、被写体として建物等の不動物体だけでなく、人等の移動物体も対象になる。そのため、被写体とカメラとの距離が時々刻々と変化し、フォーカスの移動部材を目的位置まで移動させる処理では、ピントが合わないケースが多く想定される。
【先行技術文献】
【特許文献】
【0004】
特開2004-325710号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記のような点に鑑みてなされたものであり、フォーカス処理を含むショット動作を、適切なフォーカス処理を実行しつつ、指定時間で完了させられるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明の撮像装置を制御する制御装置は、撮影領域を可変にする駆動部を備えた撮像装置を制御する制御装置であって、前記駆動部の目標位置を取得する第1の取得手段と、前記駆動部を前記目標位置に移動させるとともに、フォーカス処理を実行する時間として設定された指定時間を取得する第2の取得手段と、前記撮像装置が備える測光手段の測光結果に基づいて、前記フォーカス処理に要する時間であるフォーカス処理時間を決定する決定手段と、前記指定時間と前記フォーカス処理時間とに基づいて、前記駆動部を前記目標位置に移動させるための移動時間を算出する演算手段とを備えたことを特徴とする。
【発明の効果】
【0007】
本発明によれば、フォーカス処理を含むショット動作を、適切なフォーカス処理を実行しつつ、指定時間で完了させることが可能になる。
【図面の簡単な説明】
【0008】
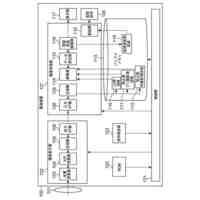
第1の実施形態に係るネットワークカメラの構成例を示すブロック図である。
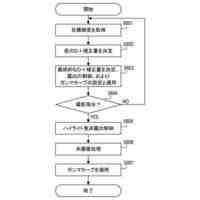
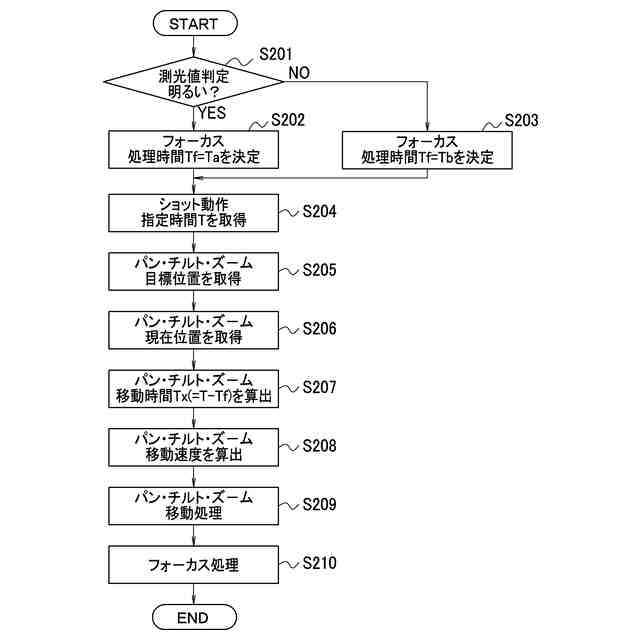
第1の実施形態においてネットワークカメラが実行する処理を示すフローチャートである。
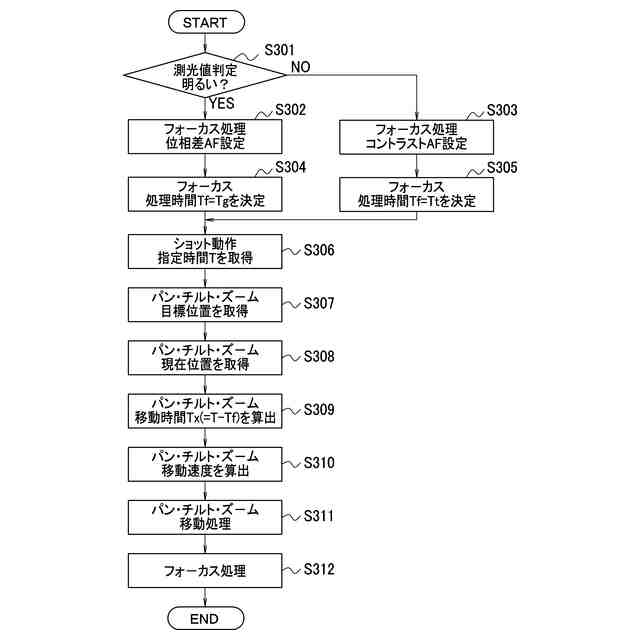
第2の実施形態においてネットワークカメラが実行する処理を示すフローチャである。
第2の実施形態におけるショット動作を説明するための図である。
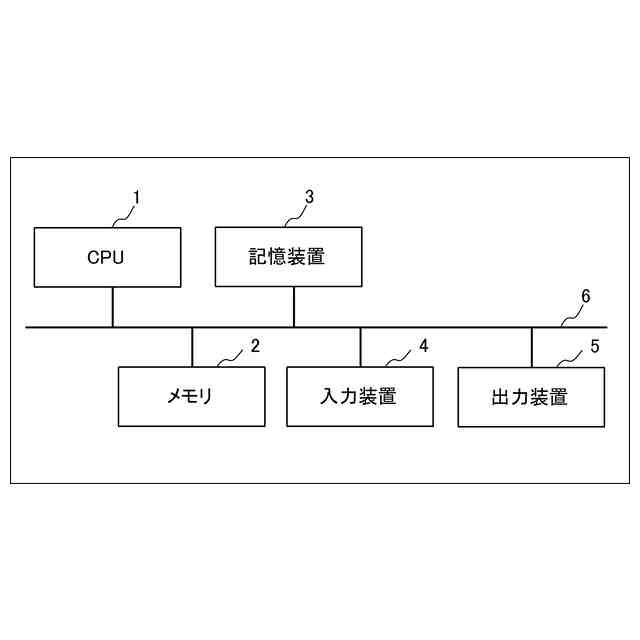
撮像装置の制御装置として機能する装置のハードウェア構成の例を示す図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して、本発明の好適な実施形態について説明する。
<第1の実施形態>
図1は、実施形態に係るネットワークカメラ100の構成例を示すブロック図である。
図1において、ネットワークカメラ100は、ネットワーク150を介して不図示のクライアント装置(情報処理装置)と相互に通信可能に接続される。
【0010】
ネットワークカメラ100は、レンズ101と、撮像素子102と、撮像制御回路103と、信号処理回路104と、メモリ転送回路105と、メモリ106と、ズーム駆動部107と、フォーカス駆動部108と、モータ制御部109とを備える。
レンズ101は、ズームレンズ、フォーカスレンズ、防振レンズ、絞り羽を含むレンズ群であり、システム制御部118の制御下で、ズームレンズの制御、フォーカスレンズの制御、防振レンズの制御、絞り羽の制御等が実行される。
ズーム駆動部107は、レンズ101に含まれるズームレンズを駆動する。ズーム駆動部107は、アクチュエータである電動モータを備える。
フォーカス駆動部108は、レンズ101に含まれるフォーカスレンズを駆動する。フォーカス駆動部108は、アクチュエータである電動モータを備える。
モータ制御部109は、システム制御部118の制御下で、ズーム駆動部107の電動モータ、フォーカス駆動部108の電動モータの制御を行う。本実施形態では、フォーカスレンズ及びフォーカス駆動部108を用いて、コントラストAF(オートフォーカス)を実行可能である。コントラストAFでは、撮像素子102から周期的に出力される撮像信号に基づいてコントラストデータからデフォーカス量を算出し、その値に基づいて合焦処理を行い、合焦したところでフォーカスレンズの駆動を停止する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
成形体
6日前
キヤノン株式会社
記録装置
2日前
キヤノン株式会社
記録装置
14日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
雲台装置
14日前
キヤノン株式会社
光学機器
21日前
キヤノン株式会社
読取装置
6日前
キヤノン株式会社
定着装置
6日前
キヤノン株式会社
制御装置
16日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
測距装置
15日前
キヤノン株式会社
定着装置
15日前
キヤノン株式会社
記録装置
7日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
情報処理装置
14日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
光電変換素子
14日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
定着用回転体
3日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像読取装置
2日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ