TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024055457
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2022162402
出願日
2022-10-07
発明の名称
工作機械の運転支援装置および工作機械の運転支援方法
出願人
株式会社アマダ
代理人
個人
,
個人
,
個人
,
個人
主分類
G05B
19/409 20060101AFI20240411BHJP(制御;調整)
要約
【課題】作業者が工作機械で行う作業を簡易且つ効率良く実行するための支援を行う、工作機械の運転支援装置を提供する。
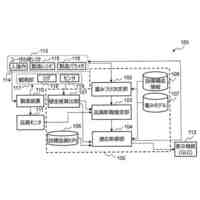
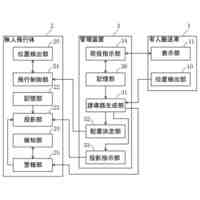
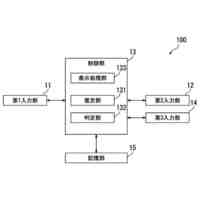
【解決手段】工作機械の運転支援装置(NC装置20)は、支援情報記憶部21と発話内容認識部241と工程情報取得部242と支援情報取得部243と動作制御部244とを備える。支援情報記憶部21は、工作機械に対する動作指示内容ごと、および工作機械が実行する作業工程ごとに予め設定された、作業者に対する支援情報を記憶する。発話内容認識部241は作業者からの発話内容を認識する。工程情報取得部242は現在実行対象としている作業工程の情報を取得する。支援情報取得部243は、作業者から認識された動作指示および取得された作業工程に対応する支援情報を支援情報記憶部21から取得する。動作制御部244は、取得した支援情報に基づいて、工作機械または作業者が工作機械の操作のために用いる装置を動作させる。
【選択図】図2
特許請求の範囲
【請求項1】
制御対象の工作機械に対する動作指示内容ごと、および前記工作機械が実行する作業工程ごとに予め設定された、前記工作機械を操作する作業者の作業を支援するための支援情報を記憶する支援情報記憶部と、
前記作業者からの発話内容を認識する発話内容認識部と、
前記工作機械が実行する複数の作業工程の中で、現在実行対象としている作業工程の情報を取得する工程情報取得部と、
前記発話内容認識部により、前記作業者からの発話内容として前記工作機械に対する動作指示が認識されると、認識された動作指示の内容および前記工程情報取得部で取得された作業工程に対応する支援情報を前記支援情報記憶部から取得する支援情報取得部と、
前記支援情報取得部が取得した支援情報に基づいて、前記工作機械または前記作業者が前記工作機械の操作のために用いる装置を動作させる動作制御部と
を備えた工作機械の運転支援装置。
続きを表示(約 1,200 文字)
【請求項2】
前記支援情報記憶部は、前記支援情報として、前記工作機械に対する動作指示内容ごとおよび前記工作機械が実行する作業工程ごとに予め設定された、前記工作機械の所定動作の前処理に関する前処理情報を記憶し、
前記支援情報取得部は、前記発話内容認識部により、前記作業者からの発話内容として前記工作機械に対する動作指示内容が認識されると、認識された動作指示内容および前記工程情報取得部で取得された作業工程の情報に対応する前処理情報を前記支援情報記憶部から取得し、
前記動作制御部は、前記支援情報取得部で取得した前処理情報に基づく処理を実行する、請求項1に記載の工作機械の運転支援装置。
【請求項3】
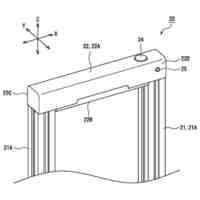
前記工作機械は板金の曲げ加工機であり、
前記支援情報記憶部は、所定の作業工程における曲げ加工の角度補正指示に関する前処理情報として、前記曲げ加工機を曲げ加工の角度補正作業に応じた状態にするための情報を記憶し、
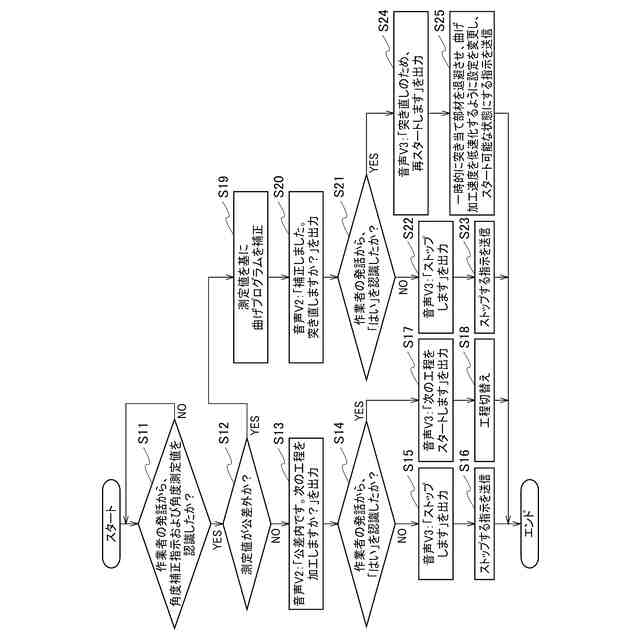
前記支援情報取得部は、前記発話内容認識部が前記作業者からの発話内容として曲げ加工の角度補正指示を認識し、前記工程情報取得部が現在実行対象としている作業工程の情報として前記所定の作業工程の情報を取得すると、前記支援情報記憶部から、前記曲げ加工機を曲げ加工の角度補正作業に応じた状態にするための情報を取得し、
前記動作制御部は、前記支援情報取得部が取得した情報に基づいて、前記曲げ加工機を曲げ加工の角度補正作業に応じた状態にするための動作を実行させる、請求項2に記載の工作機械の運転支援装置。
【請求項4】
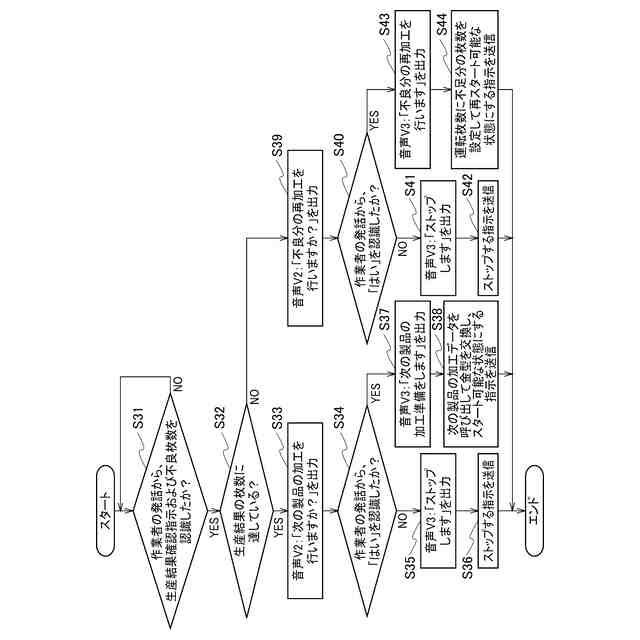
前記動作制御部は、前記発話内容認識部により、前記作業者からの発話内容として前記工作機械に対する動作指示が認識されると、認識された動作指示の内容と、前記工程情報取得部で取得された作業工程と、前記作業者との対話処理により認識した次の作業に関する前記作業者の意向とに対応する支援情報を前記支援情報記憶部から取得する、請求項1に記載の工作機械の運転支援装置。
【請求項5】
工作機械の運転支援装置が、
制御対象の工作機械に対する動作指示内容ごと、および前記工作機械が実行する作業工程ごとに予め設定された、前記工作機械を操作する作業者の作業を支援するための支援情報を記憶し、
前記工作機械が実行する複数の作業工程の中で、現在実行対象としている作業工程の情報を取得し、
前記作業者からの発話内容として前記工作機械に対する動作指示を認識すると、認識した動作指示の内容および取得した作業工程の情報に対応する支援情報を記憶した中から取得し、
取得した支援情報に基づいて、前記工作機械または前記作業者が前記工作機械の操作のために用いる装置を動作させる、工作機械の運転支援方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、工作機械の運転支援装置および工作機械の運転支援方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
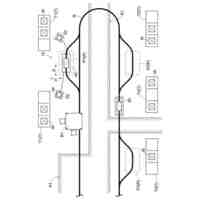
工作機械を使用する際、作業者は通常、手動作業を伴って加工作業を進めるため、作業者の両手が手動作業のためにふさがっていることが多い。例えば、板金(ワーク)を曲げ加工するためにプレスブレーキを使用する際には、作業者がワークを両手で把持したり、計測器を用いたりしながら作業を進めることがある。そのため、作業を次工程に進めるための手動によるボタン操作、または制御装置の表示部に表示された作業に関する提供情報の確認がし辛くなる場合がある。
【0003】
これに鑑み、作業者からの作業に関する発話を音声認識し、認識した内容に基づいて工作機械を動作させたり、作業者に提供する情報を音声で出力させたりする制御装置がある(特許文献1参照)。このような制御装置を用いることで、作業者の両手が加工作業のためにふさがっていても、容易に作業に関する情報を認識し、次工程に進めるための指示を工作機械に与えることができる。
【先行技術文献】
【特許文献】
【0004】
特開2020-42420号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、作業者による作業に関する内容の発話に要する時間は、ボタン操作に要する時間よりも長くなる場合が多い。また、作業者による発話の内容を音声認識してこれに対応する提供情報を特定し、特定した提供情報を音声出力することに要する時間は、作業者が表示部に移動して、表示部に表示された提供情報を視認する時間よりも長くなる場合が多い。
【0006】
そのため、音声情報のやりとりを利用して工作機械での作業を進めるようにすると、作業者の手動操作や移動の回数を低減させることが可能になる一方で、各処理に要する時間が長くなり、結果として生産性が低下するという問題がある。これに鑑み、作業者が簡易且つ効率良く工作機械で行う作業を実行できるよう支援することが望まれている。
【課題を解決するための手段】
【0007】
1またはそれ以上の実施形態の一態様の工作機械の運転支援装置は、制御対象の工作機械に対する動作指示内容ごと、および前記工作機械が実行する作業工程ごとに予め設定された、前記工作機械を操作する作業者の作業を支援するための支援情報を記憶する支援情報記憶部と、前記作業者からの発話内容を認識する発話内容認識部と、前記工作機械が実行する複数の作業工程の中で、現在実行対象としている作業工程の情報を取得する工程情報取得部と、前記発話内容認識部により、前記作業者からの発話内容として前記工作機械に対する動作指示が認識されると、認識された動作指示の内容および前記工程情報取得部で取得された作業工程に対応する支援情報を前記支援情報記憶部から取得する支援情報取得部と、前記支援情報取得部が取得した支援情報に基づいて、前記工作機械または前記作業者が前記工作機械の操作のために用いる装置を動作させる動作制御部とを備える。
【0008】
1またはそれ以上の実施形態の一態様の工作機械の運転支援方法は、工作機械の運転支援装置が、制御対象の工作機械に対する動作指示内容ごと、および前記工作機械が実行する作業工程ごとに予め設定された、前記工作機械を操作する作業者の作業を支援するための支援情報を記憶し、前記工作機械が実行する複数の作業工程の中で、現在実行対象としている作業工程の情報を取得し、前記作業者からの発話内容として前記工作機械に対する動作指示を認識すると、認識した動作指示の内容および取得した作業工程の情報に対応する支援情報を記憶した中から取得し、取得した支援情報に基づいて、前記工作機械または前記作業者が前記工作機械の操作のために用いる装置を動作させる。
【0009】
上述した工作機械の運転支援装置および工作機械の運転支援方法は、作業者に対し、工作機械で行う作業を簡易且つ効率良く実行するための支援を行うことができる。
【発明の効果】
【0010】
1またはそれ以上の実施形態の工作機械の運転支援装置および工作機械の運転支援方法によれば、作業者が工作機械で行う作業を簡易且つ効率良く実行するための支援を行うことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
流量制御装置
24日前
ミネベアミツミ株式会社
入力装置
15日前
株式会社エクセディ
作業ロボット
3日前
トヨタ自動車株式会社
自動走行搬送車
23日前
三菱電機株式会社
移動体制御装置
2日前
エイブリック株式会社
ボルテージレギュレータ
23日前
株式会社クボタ
故障診断装置
22日前
岩田工機株式会社
加工装置
2日前
株式会社デンソー
制御装置
28日前
リックス株式会社
状態検出装置
18日前
株式会社デンソー
制御装置
28日前
村田機械株式会社
搬送車システム
8日前
株式会社GSユアサ
電力変換装置
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
28日前
東洋電装株式会社
移動検出装置および鞍乗車両
1か月前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
株式会社デンソー
ペダル装置
28日前
多摩川精機株式会社
突入電流防止回路
8日前
株式会社ダイフク
無人航空機の搬送システム
1か月前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
株式会社ディスコ
加工装置
8日前
株式会社日立製作所
設備診断装置及び設備診断方法
15日前
清水建設株式会社
自律移動ロボット
15日前
清水建設株式会社
自律移動ロボット
15日前
三菱ロジスネクスト株式会社
誘導システム
17日前
株式会社IHI
加工装置および加工方法
18日前
サイレックス・テクノロジー株式会社
通信端末、および、走行状況表示方法
9日前
ニデック株式会社
ロット管理システム、ロット管理方法及び表示装置
22日前
キオクシア株式会社
製造ラインの管理方法
1か月前
ローム株式会社
スレーブ回路およびそれを用いた遠隔制御システム
2日前
株式会社日立製作所
計画ロジック評価支援システムおよび方法
24日前
ニデック株式会社
制御装置、走行装置、制御方法及び制御プログラム
28日前
株式会社東芝
コントローラ
1か月前
沖電気工業株式会社
ロボット、情報処理方法およびプログラム
1か月前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
28日前
住友重機械工業株式会社
移動体の運転支援装置及び自動運転システム
15日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ