TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024053399
公報種別
公開特許公報(A)
公開日
2024-04-15
出願番号
2022159648
出願日
2022-10-03
発明の名称
屈曲構造体及びその半製品
出願人
日本発條株式会社
代理人
個人
,
個人
主分類
B25J
17/00 20060101AFI20240408BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】屈曲構造体に付勢力を付与する場合に、芯材に加わる荷重を緩和して屈曲動作の異常を抑制することが可能な屈曲構造体を提供する。
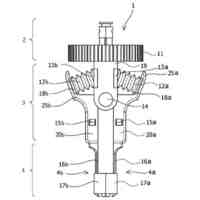
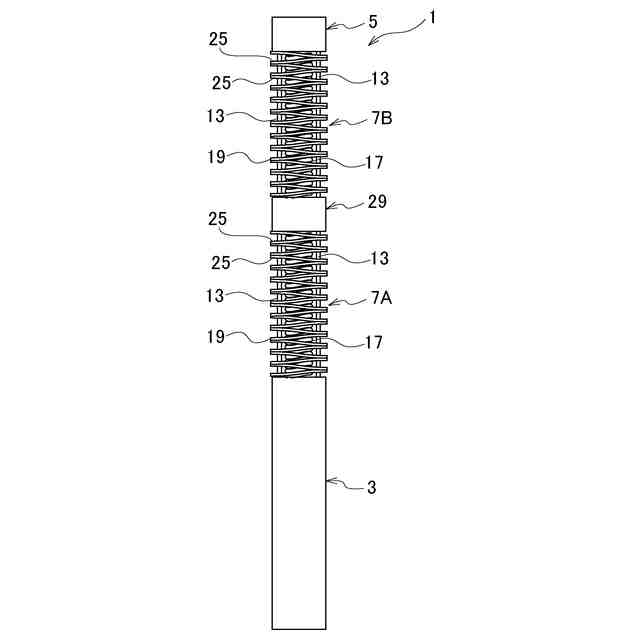
【解決手段】軸方向の圧縮力に抗し屈曲を許容する可撓性を有する芯材17と、芯材17と並列に位置し軸方向に圧縮可能な弾性部材19と、芯材17及び弾性部材19の軸方向の一側を受ける基部3と、芯材17及び弾性部材19の軸方向の他側を受ける可動部5とを備え、芯材17は、弾性部材19が基部3及び可動部5に受けられた非圧縮の状態で、基部3及び可動部5受け部3b及び5b間の軸方向の長さよりも短い軸方向の長さを有し、弾性部材19は、基部3及び可動部5の間隔に応じた軸方向の荷重を受けて圧縮され付勢力を付与する。
【選択図】図5
特許請求の範囲
【請求項1】
伸展状態から屈曲状態へ屈曲可能な屈曲構造体であって、
軸方向の圧縮力に抗し前記屈曲を許容する可撓性を有する芯材と、
該芯材と並列に位置し前記軸方向に圧縮可能な弾性部材と、
前記芯材及び前記弾性部材の軸方向の一側を受ける受け部を有する一側受部材と、
前記芯材及び前記弾性部材の前記軸方向の他側を受ける受け部を有する他側受部材と、を備え、
前記芯材は、前記弾性部材が前記一側受部材及び前記他側受部材に受けられた非圧縮の状態で、前記一側受部材及び前記他側受部材の前記芯材を受ける前記受け部間の前記軸方向の長さよりも短い前記軸方向の長さを有し、
前記弾性部材は、前記一側受部材と前記他側受部材との間隔に応じた前記軸方向の荷重を受けて圧縮され付勢力を付与する、
屈曲構造体。
続きを表示(約 880 文字)
【請求項2】
請求項1の屈曲構造体であって、
前記芯材は、前記一側受部材及び前記他側受部材の当接する前記受け部間に非圧縮の状態で介在する、
屈曲構造体。
【請求項3】
請求項1又は2の屈曲構造体であって、
前記弾性部材は、前記芯材の前記軸方向の長さと前記受け部間の前記軸方向の長さとの差以上に圧縮された、
屈曲構造体。
【請求項4】
請求項1又は2の屈曲構造体であって、
前記芯材は、外コイルばね及び前記外コイルばねの内側に配置された内コイルばねを備えた多重可撓体であり、前記内コイルばねの素線が前記外コイルばねの素線間に嵌合する、
屈曲構造体。
【請求項5】
請求項1又は2の屈曲構造体であって、
前記一側受部材と前記他側受部材との間隔を調整する間隔調整部を備えた、
屈曲構造体。
【請求項6】
請求項5の屈曲構造体であって、
前記間隔調整部は、前記一側受部材に一側が固定され他側が前記他側受部材を通して配策され前記伸展状態から屈曲状態へ屈曲を操作するための複数の索状部材を備え、前記索状部材が前記間隔の調整に用いられる、
屈曲構造体。
【請求項7】
伸展状態から屈曲状態へ屈曲可能な屈曲構造体の半製品であって、
軸方向の圧縮力に抗し前記屈曲を許容する可撓性を有する芯材と、
該芯材と並列に位置し軸方向に圧縮可能な弾性部材と、
前記芯材及び前記弾性部材の軸方向の一側を受ける受け部を有する一側受部材と、
前記芯材及び前記弾性部材の前記軸方向の他側を受ける受け部を有する他側受部材と、を備え、
前記弾性部材は、前記一側受部材及び前記他側受部材に受けられた非圧縮の状態であり、
前記芯材は、前記一側受部材及び前記他側受部材の前記芯材を受ける前記受け部間の前記軸方向の長さよりも短い前記軸方向の長さを有する、
屈曲構造体の半製品。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット等に供される屈曲構造体及びその半製品に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
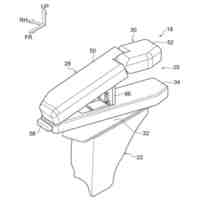
ロボット、マニピュレーター、アクチュエーター等には、屈曲・伸展を可能とする関節機能部を備えたものがある。このような関節機能部には、例えば、特許文献1のような屈曲構造体が用いられる。
【0003】
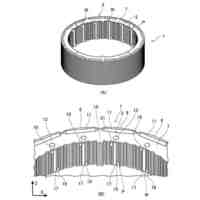
特許文献1の屈曲構造体は、一側受部材及び他側部材である基部及び可動部間に、芯材である内コイル部及び外コイル部、並びにその径方向外側に弾性部材であるベローズが配置されている。
【0004】
この屈曲構造体は、可動部に結合された駆動ワイヤーを軸方向に引張ることで、屈曲動作を行うようになっている。また、屈曲動作の際には、内外コイル部により軸方向の不用意な圧縮を抑制して動作が安定する。
【0005】
このような屈曲構造体では、基部及び可動部間を軸方向で相互に離れるように付勢する付勢力が付与され、駆動ワイヤーのたるみが防止されている。この付勢力は、基部及び可動部間の間隔に応じた荷重により内外コイル部及びベローズを軸方向に圧縮することで設定することが可能である。
【0006】
しかし、付勢力を設定する際の荷重は、芯材である内外コイル部によって主に受けられることになる。この結果、内外コイル部の可撓性に影響を与え、屈曲構造体の屈曲動作に異常を生じさせるおそれがあった。
【0007】
かかる問題は、内外コイル部に代えて密着ばねや柱状体等の他の芯材を用いた場合にも、同様に生じていた。
【先行技術文献】
【特許文献】
【0008】
特開2020-26021号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
解決しようとする問題点は、屈曲構造体に付勢力を付与する場合に屈曲構造体の屈曲動作に異常を生じさせるおそれがあった点である。
【課題を解決するための手段】
【0010】
本発明は、伸展状態から屈曲状態へ屈曲可能な屈曲構造体であって、軸方向の圧縮力に抗し前記屈曲を許容する可撓性を有する芯材と、該芯材と並列に位置し前記軸方向に圧縮可能な弾性部材と、前記芯材及び前記弾性部材の軸方向の一側を受ける受け部を有する一側受部材と、前記芯材及び前記弾性部材の前記軸方向の他側を受ける受け部を有する他側受部材と、を備え、前記芯材は、前記弾性部材が前記一側受部材及び前記他側受部材に受けられた非圧縮の状態で、前記一側受部材及び前記他側受部材の前記芯材を受ける前記受け部間の前記軸方向の長さよりも短い前記軸方向の長さを有し、前記弾性部材は、前記一側受部材と前記他側受部材との間隔に応じた前記軸方向の荷重を受けて圧縮され付勢力を付与する、屈曲構造体を提供する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本発條株式会社
電気接続構造
今日
日本発條株式会社
車両用シート
1日前
日本発條株式会社
積層鉄心及びその製造方法
今日
日本発條株式会社
アームレスト及び車両用シート
2日前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
21日前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
個人
ロボットシステム
4か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
4か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
グリッパ
1か月前
学校法人立命館
ロボットハンド
1か月前
個人
プーリーキー抜き治具
1か月前
CKD株式会社
電動把持装置
今日
株式会社不二越
予測システム
2か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社中村製作所
トルクドライバー
1か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
8日前
工機ホールディングス株式会社
作業機
2か月前
株式会社豆蔵
ロボットハンド
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ