TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024049235
公報種別
公開特許公報(A)
公開日
2024-04-09
出願番号
2022155578
出願日
2022-09-28
発明の名称
画像処理装置、ステレオカメラ装置及び画像処理方法
出願人
京セラ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G06T
7/593 20170101AFI20240402BHJP(計算;計数)
要約
【課題】被写体までの距離をより精度良く測定することができる技術を提供する。
【解決手段】画像処理装置は、取得部と、制御部とを備える。制御部は、複数の平面射影変換によって基準画像の第1基準画素の座標を参照画像に含まれる複数の参照画素の座標に変換し、座標を変換した複数の参照画素のうちで第1基準画素と同じ被写体を含む参照画素を特定し、第1基準画素と特定した参照画素とを対応付ける対応付け処理を実行する。制御部は、複数の平面射影変換の逆変換によって第1基準画素に対応付けた参照画素の座標を基準画像に含まれる複数の基準画素の座標に変換し、座標を変換した複数の基準画素のうちで第1基準画素に対応付けた参照画素と同じ被写体を含む第2基準画素を特定し、第1基準画素と第2基準画素とに基づいて、第1基準画素と参照画素との対応付けが誤対応であるか否かを判定する判定処理を実行する。
【選択図】図1
特許請求の範囲
【請求項1】
基準位置で撮像により生成された基準画像のデータと、前記基準画像とは異なる位置で撮像により生成された参照画像のデータとを取得する取得部と、
複数の平面射影変換によって前記基準画像の第1基準画素の座標を前記参照画像に含まれる複数の参照画素の座標に変換し、座標を変換した前記複数の参照画素のうちで前記第1基準画素と同じ被写体を含む参照画素を特定し、前記第1基準画素と特定した前記参照画素とを対応付ける対応付け処理を実行する制御部と、を備え、
前記制御部は、
前記複数の平面射影変換の逆変換によって前記第1基準画素に対応付けた前記参照画素の座標を前記基準画像に含まれる複数の基準画素の座標に変換し、座標を変換した前記複数の基準画素のうちで前記第1基準画素に対応付けた前記参照画素と同じ被写体を含む第2基準画素を特定し、前記第1基準画素と前記第2基準画素とに基づいて、前記第1基準画素と前記参照画素との対応付けが誤対応であるか否かを判定する判定処理を実行し、
前記複数の平面射影変換は、前記基準画像を生成したカメラへの光線であって、複数の仮想平面のそれぞれに位置する複数の仮想点を通る光線を、前記参照画像を生成したカメラへの光線であって、前記複数の仮想点を通る光線に変換する、
画像処理装置。
続きを表示(約 1,300 文字)
【請求項2】
前記基準画像及び前記参照画像は、広角レンズによって撮像された画像である、請求項1に記載の画像処理装置。
【請求項3】
前記制御部は、前記判定処理において、
前記参照画像を生成したカメラへの光線であって、前記第1基準画素に対応付けられた前記参照画素を通る光線のデータを取得し、
取得した前記光線を前記複数の平面射影変換の逆変換によって前記基準画像を生成したカメラへの光線に変換し、変換した前記光線を前記基準画像に投影することにより、前記複数の基準画素の座標を取得する、請求項2に記載の画像処理装置。
【請求項4】
前記制御部は、前記判定処理において、前記第1基準画素と前記第2基準画素との間の距離が閾値以上であると判定した場合、前記第1基準画素と前記参照画素との対応付けが誤対応であると判定する、請求項1に記載の画像処理装置。
【請求項5】
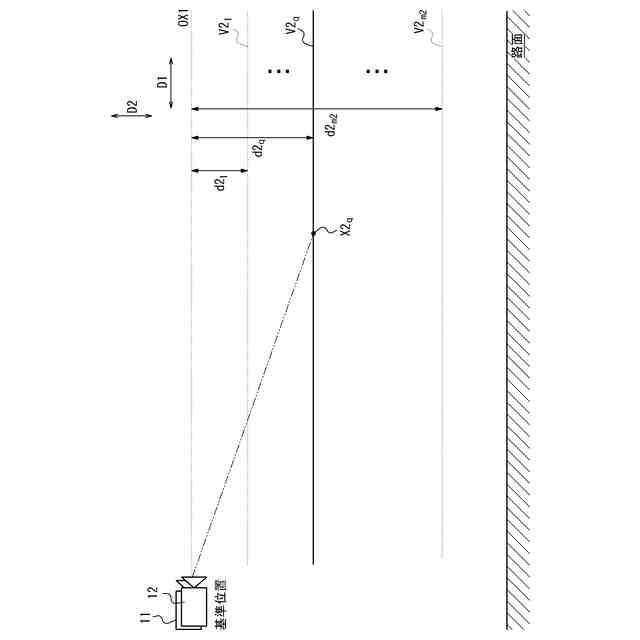
前記仮想平面の法線方向は、前記基準画像を生成したカメラの光軸方向に基づいて設定され、
前記制御部は、前記第1基準画素に含まれる被写体までの距離を、前記基準位置から、前記第1基準画素に対応付けられた前記参照画素の座標の取得に用いられた前記仮想平面までの距離に基づいて取得する、請求項1に記載の画像処理装置。
【請求項6】
前記複数の仮想平面は、第1仮想平面及び第2仮想平面の両方を含み、
前記第1仮想平面の法線方向は、前記基準画像を生成したカメラの光軸方向である第1方向に一致し、
前記第1仮想平面は、前記第1方向に沿って前記基準位置から第1距離離れて位置し、
前記第2仮想平面の法線方向は、前記第1方向とは異なる第2方向に一致し、
前記第2仮想平面は、前記第2方向に沿って前記基準位置から第2距離離れて位置する、請求項1に記載の画像処理装置。
【請求項7】
前記制御部は、
前記対応付け処理において、前記第1基準画素の特徴量及び前記複数の参照画素の特徴量を抽出し、抽出した前記第1基準画素の特徴量と前記複数の参照画素のそれぞれの特徴量との間の類似度をそれぞれ示す複数のコスト値を算出し、前記複数のコスト値に基づいて、前記第1基準画素と同じ被写体を含む参照画素を特定し、
前記判定処理において、前記対応付け処理にて算出した前記複数のコスト値に基づいて、前記第1基準画素に対応付けた前記参照画素と同じ被写体を含む第2基準画素を特定する、請求項1に記載の画像処理装置。
【請求項8】
前記制御部は、前記被写体までの距離の情報に基づいた画素値を有する距離画素を含む距離画像を生成する、請求項5に記載の画像処理装置。
【請求項9】
前記制御部は、前記誤対応であると判定した前記第1基準画素に対応する前記距離画素を無効にする、請求項8に記載の画像処理装置。
【請求項10】
前記制御部は、複数の前記距離画素のうち、無効にした前記距離画素の画素値を、他の前記距離画素の画素値によって補間する、請求項9に記載の画像処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、画像処理装置、ステレオカメラ装置及び画像処理方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
特許文献1には、第1の視野及び第1の光軸を有する第1のカメラと、第2の視野及び第2の光軸を有する第2のカメラとを備える撮像システムが開示されている。特許文献1には、第1の視野及び第2の視野が少なくとも部分的に重複し、組み合わされた視野を形成することが記載されている。
【先行技術文献】
【特許文献】
【0003】
特表2020-522906号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
被写体までの距離をより精度良く測定することが求められる。
【0005】
かかる点に鑑みてなされた本開示の目的は、被写体までの距離をより精度良く測定することができる技術を提供することにある。
【課題を解決するための手段】
【0006】
本開示の一実施形態に係る画像処理装置は、
基準位置で撮像により生成された基準画像のデータと、前記基準画像とは異なる位置で撮像により生成された参照画像のデータとを取得する取得部と、
複数の平面射影変換によって前記基準画像の第1基準画素の座標を前記参照画像に含まれる複数の参照画素の座標に変換し、座標を変換した前記複数の参照画素のうちで前記第1基準画素と同じ被写体を含む参照画素を特定し、前記第1基準画素と特定した前記参照画素とを対応付ける対応付け処理を実行する制御部と、を備え、
前記制御部は、
前記複数の平面射影変換の逆変換によって前記第1基準画素に対応付けた前記参照画素の座標を前記基準画像に含まれる複数の基準画素の座標に変換し、座標を変換した前記複数の基準画素のうちで前記第1基準画素に対応付けた前記参照画素と同じ被写体を含む第2基準画素を特定し、前記第1基準画素と前記第2基準画素とに基づいて、前記第1基準画素と前記参照画素との対応付けが誤対応であるか否かを判定する判定処理を実行し、
前記複数の平面射影変換は、前記基準画像を生成したカメラへの光線であって、複数の仮想平面のそれぞれに位置する複数の仮想点を通る光線を、前記参照画像を生成したカメラへの光線であって、前記複数の仮想点を通る光線に変換する。
【0007】
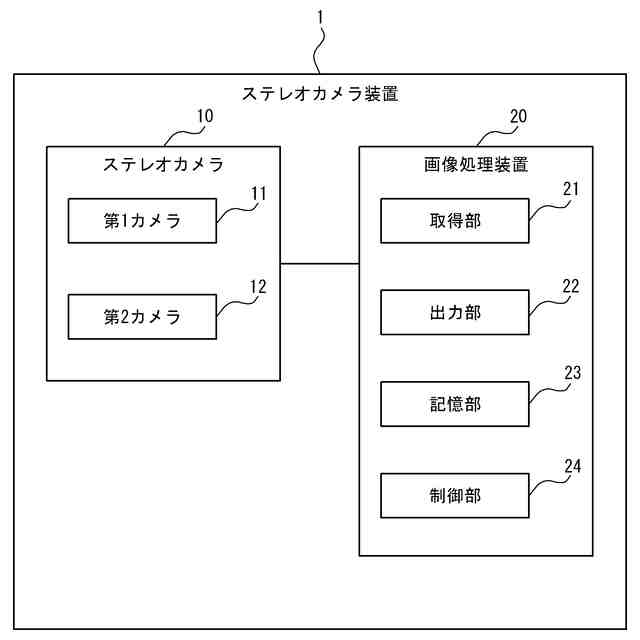
本開示の一実施形態に係るステレオカメラ装置は、
基準位置で撮像により基準画像を生成する第1カメラと、前記基準画像とは異なる位置で撮像により参照画像を生成する第2カメラとを含むステレオカメラと、
複数の平面射影変換によって前記基準画像の第1基準画素の座標を前記参照画像に含まれる複数の参照画素の座標に変換し、座標を変換した前記複数の参照画素のうちで前記第1基準画素と同じ被写体を含む参照画素を特定し、前記第1基準画素と特定した前記参照画素とを対応付ける対応付け処理を実行する画像処理装置と、を備え、
前記画像処理装置は、
前記複数の平面射影変換の逆変換によって前記第1基準画素に対応付けた前記参照画素の座標を前記基準画像に含まれる複数の基準画素の座標に変換し、座標を変換した前記複数の基準画素のうちで前記第1基準画素に対応付けた前記参照画素と同じ被写体を含む第2基準画素を特定し、前記第1基準画素と前記第2基準画素とに基づいて、前記第1基準画素と前記参照画素との対応付けが誤対応であるか否かを判定する判定処理を実行し、
前記複数の平面射影変換は、複数の仮想平面のそれぞれに位置する複数の仮想点を通る前記第1カメラへの光線を前記複数の仮想点を通る前記第2カメラへの光線に変換する。
【0008】
本開示の一実施形態に係る画像処理方法は、
基準位置で撮像により生成された基準画像のデータと、前記基準画像とは異なる位置で撮像により生成された参照画像のデータとを取得することと、
複数の平面射影変換によって前記基準画像の第1基準画素の座標を前記参照画像に含まれる複数の参照画素の座標に変換し、座標を変換した前記複数の参照画素のうちで前記第1基準画素と同じ被写体を含む参照画素を特定し、前記第1基準画素と特定した前記参照画素とを対応付ける対応付け処理を実行することと、
前記複数の平面射影変換の逆変換によって前記第1基準画素に対応付けた前記参照画素の座標を前記基準画像に含まれる複数の基準画素の座標に変換し、座標を変換した前記複数の基準画素のうちで前記第1基準画素に対応付けた前記参照画素と同じ被写体を含む第2基準画素を特定し、前記第1基準画素と前記第2基準画素とに基づいて、前記第1基準画素と前記参照画素との対応付けが誤対応であるか否かを判定する判定処理を実行することと、を含み、
前記複数の平面射影変換は、前記基準画像を生成したカメラへの光線であって、複数の仮想平面のそれぞれに位置する複数の仮想点を通る光線を、前記参照画像を生成したカメラへの光線であって、前記複数の仮想点を通る光線に変換する。
【発明の効果】
【0009】
本開示の一実施形態によれば、被写体までの距離をより精度良く測定することができる技術を提供することができる。
【図面の簡単な説明】
【0010】
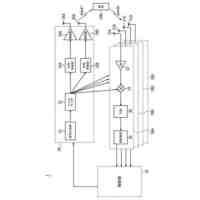
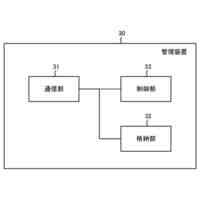
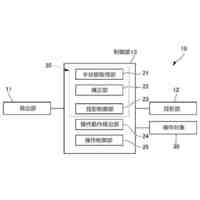
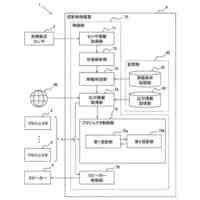
本開示の一実施形態に係るステレオカメラ装置の概略構成を示すブロック図である。
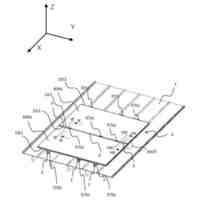
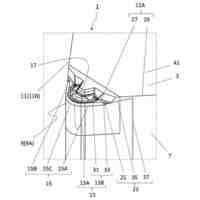
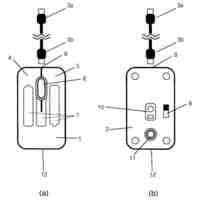
図1に示すステレオカメラ装置が搭載される移動体を模式的に示す側面図である。
図1に示すステレオカメラ装置が搭載される移動体を模式的に示す正面図である。
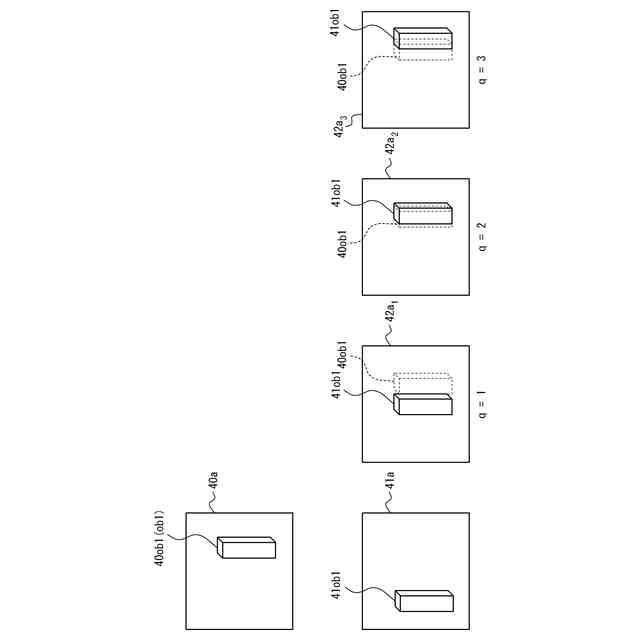
第1仮想画像及び第1仮想平面を説明するための図である。
第1仮想画像における第1被写体の位置を説明するための図である。
第2仮想画像及び第2仮想平面を説明するための図である。
第2仮想画像における第2被写体の位置を説明するための図である。
距離画像の一例を示す図である。
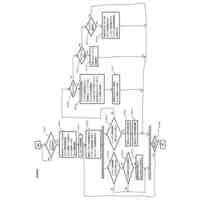
対応付け処理の手順を示すフローチャートである。
対応付け処理の手順を示すフローチャートである。
誤対応の判定処理の手順を示すフローチャートである。
誤対応の判定処理の手順を示すフローチャートである。
魚眼レンズによって撮像された画像を説明するための図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
京セラ株式会社
圧電素子
7日前
京セラ株式会社
通信制御方法
7日前
京セラ株式会社
電力管理装置及び電力管理方法
2日前
京セラ株式会社
電力管理装置及び電力管理方法
2日前
京セラ株式会社
電力管理装置及び電力管理方法
2日前
京セラ株式会社
太陽電池アレイ、カバー部品及びカバー固定具
9日前
京セラ株式会社
電子機器、電子機器の制御方法、及びプログラム
今日
京セラ株式会社
電子機器、電子機器の制御方法、及びプログラム
今日
京セラ株式会社
切削インサート、切削工具及び切削加工物の製造方法
7日前
京セラ株式会社
放熱部材
1日前
京セラ株式会社
放熱部材
1日前
京セラ株式会社
半導体基板
今日
京セラ株式会社
半導体基板
今日
京セラ株式会社
電力管理システム及び電力管理方法
9日前
京セラ株式会社
半導体デバイスの製造方法、半導体基板
9日前
京セラ株式会社
商品管理システム、管理装置、及び商品管理方法
1日前
京セラ株式会社
表面弾性波素子用の複合基板およびその製造方法
13日前
京セラ株式会社
通信制御方法、ユーザ装置、チップセット、プログラム、基地局及びシステム
1日前
京セラ株式会社
通信制御方法、移動IABノード、プログラム、チップセット及びセルラ通信システム
1日前
個人
乗降調査装置
16日前
個人
管理装置
今日
個人
自動販売機
23日前
個人
コメント配信システム
1か月前
個人
リユース統合システム
1か月前
日本精機株式会社
投影装置
16日前
個人
広告提供方法
1か月前
日本精機株式会社
投影システム
17日前
個人
釣PAID降水確率ポイント
1か月前
株式会社SUBARU
車両
1か月前
小林クリエイト株式会社
RFタグ
23日前
個人
情報処理装置及びプログラム
1か月前
個人
チラシ掲載位置表示システム
1か月前
個人
モノづくり知識情報システム
1か月前
株式会社SUBARU
車両
24日前
17LIVE株式会社
サーバ
16日前
株式会社協同印刷
防災・災害マウス
29日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ