TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024049157
公報種別
公開特許公報(A)
公開日
2024-04-09
出願番号
2022155450
出願日
2022-09-28
発明の名称
時系列データ評価装置、時系列データ評価用プログラム及び時系列データ評価方法
出願人
東芝情報システム株式会社
,
国立大学法人京都大学
代理人
個人
,
個人
,
個人
主分類
G06F
17/18 20060101AFI20240402BHJP(計算;計数)
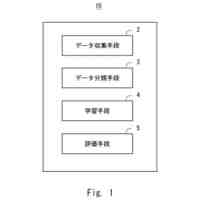
要約
【課題】高精度で処理速度の高速化を図る。
【解決手段】ξ
t
∈A
i
となる確率p(i)を算出する確率算出部201と、前記分割区間A
i
(i=1,2,・・・,M)を更にQ等分に分割した細分割区間B
i
(i=1,2,・・・,M×Q)を設定して、この細分割区間における測度を用いて分割エントロピーを求める分割エントロピー算出部202と、前記確率p(i)と前記分割エントロピーの乗算について、前記分割区間範囲の総和演算を行う総和演算部203とを具備する。
【選択図】図5
特許請求の範囲
【請求項1】
τを直線上で定義された写像τを
TIFF
2024049157000043.tif
16
55
とし、初期値ξ
0
∈Iに対して、
ξ
t
=τ(ξ
t-1
)=τ
t
(ξ
0
),t=1,2,・・・,n
によるn回の反復によって得られた、合計n+1個の時系列データを
{ξ
0
,ξ
1
,ξ
2
,・・・,ξ
n
}
とし、ξ
t
が含まれる区間IをM等分した分割区間を、A
i
(i=1,2,・・・,M)で表したとき、分割区間は、以下の式(1)を満たすとき、
TIFF
2024049157000044.tif
22
134
c
1
(i),p(i)を、以下の式(2)、式(4)とし、
c
1
(i)=#{ξ
t
∈A
i
|t=0,1,2,・・・,n-1}・・・(2)
TIFF
2024049157000045.tif
20
80
ξ
t
∈A
i
となる確率p(i)を算出する確率算出部と、
前記分割区間A
i
(i=1,2,・・・,M)を更にQ等分に分割した細分割区間B
i
(i=1,2,・・・,M×Q)を設定して、この細分割区間における測度を用いて分割エントロピーを求める分割エントロピー算出部と、
前記確率p(i)と前記分割エントロピーの乗算について、前記分割区間範囲の総和演算を行う総和演算部と
を具備することを特徴とする時系列データ評価装置。
続きを表示(約 2,400 文字)
【請求項2】
前記分割エントロピー算出部は、前記細分割区間における外測度を用いて外測度エントロピーを算出する外測度エントロピー算出部を具備することを特徴とする請求項1に記載の時系列データ評価装置。
【請求項3】
前記分割エントロピー算出部は、前記細分割区間における内測度を用いて内測度エントロピーを算出する内測度エントロピー算出部を具備することを特徴とする請求項2に記載の時系列データ評価装置。
【請求項4】
前記分割エントロピー算出部は、前記外測度エントロピーと前記内測度エントロピーとの平均値を分割エントロピーとして総和演算に用いることを特徴とする請求項3に記載の時系列データ評価装置。
【請求項5】
前記分割区間A
i
(i=1,2,・・・,M)を更にW等分に分割した写像前細分割区間C
i
(i=1,2,・・・,M×W)について、実データが存在する写像前細分割区間の数をv
i
とし、写像前細分割区間内における実データ存在率w
i
を、w
i
=v
i
/Wにより求める実データ存在率算出部を具備し、
前記分割エントロピー算出部は、前記外測度エントロピーと前記内測度エントロピーを、前記実データ存在率w
i
により補正した補正外測度エントロピーと補正内測度エントロピーを作成し、この補正外測度エントロピーと補正内測度エントロピーとの平均値を分割エントロピーとして総和演算に用いることを特徴とする請求項4に記載の時系列データ評価装置。
【請求項6】
コンピュータを、
τを直線上で定義された写像τを
TIFF
2024049157000046.tif
18
59
とし、初期値ξ
0
∈Iに対して、
ξ
t
=τ(ξ
t-1
)=τ
t
(ξ
0
),t=1,2,・・・,n
によるn回の反復によって得られた、合計n+1個の時系列データを
{ξ
0
,ξ
1
,ξ
2
,・・・,ξ
n
}
とし、ξ
t
が含まれる区間IをM等分した分割区間を、A
i
(i=1,2,・・・,M)で表したとき、分割区間は、以下の式(1)を満たすとき、
TIFF
2024049157000047.tif
22
135
c
1
(i),p(i)を、以下の式(2)、式(4)とし、
c
1
(i)=#{ξ
t
∈A
i
|t=0,1,2,・・・,n-1}・・・(2)
TIFF
2024049157000048.tif
20
78
ξ
t
∈A
i
となる確率p(i)を算出する確率算出部、
前記分割区間A
i
(i=1,2,・・・,M)を更にQ等分に分割した細分割区間B
i
(i=1,2,・・・,M×Q)を設定して、この細分割区間における測度を用いて分割エントロピーを求める分割エントロピー算出部、
前記確率p(i)と前記分割エントロピーの乗算について、前記分割区間範囲の総和演算を行う総和演算部
として機能させることを特徴とする時系列データ評価用プログラム。
【請求項7】
前記分割エントロピー算出部として機能する前記コンピュータを、前記細分割区間における外測度を用いて外測度エントロピーを算出する外測度エントロピー算出部として機能させることを特徴とする請求項6に記載の時系列データ評価用プログラム。
【請求項8】
前記分割エントロピー算出部として機能する前記コンピュータを、前記細分割区間における内測度を用いて内測度エントロピーを算出する内測度エントロピー算出部として機能させることを特徴とする請求項7に記載の時系列データ評価用プログラム。
【請求項9】
前記分割エントロピー算出部として機能する前記コンピュータを、前記外測度エントロピーと前記内測度エントロピーとの平均値を分割エントロピーとして総和演算に用いるように機能させることを特徴とする請求項8に記載の時系列データ評価用プログラム。
【請求項10】
前記コンピュータを、更に、
前記分割区間A
i
(i=1,2,・・・,M)を更にW等分に分割した写像前細分割区間C
i
(i=1,2,・・・,M×W)について、実データが存在する写像前細分割区間の数をv
i
とし、写像前細分割区間内における実データ存在率w
i
を、w
i
=v
i
/Wにより求める実データ存在率算出部として機能させ、
前記コンピュータを前記分割エントロピー算出部として、前記外測度エントロピーと前記内測度エントロピーを、前記実データ存在率w
i
により補正した補正外測度エントロピーと補正内測度エントロピーを作成し、この補正外測度エントロピーと補正内測度エントロピーとの平均値を分割エントロピーとして総和演算に用いるように機能させることを特徴とする請求項9に記載の時系列データ評価用プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、時系列データ評価装置、時系列データ評価用プログラム及び時系列データ評価方法に関するものである。
続きを表示(約 3,900 文字)
【背景技術】
【0002】
従来、時系列データのカオス度合を定量化する場合には、リアプノフ指数に如何に近似させた曲線を作り出せるかが競われている。即ち、カオスの測定/定量化手段として、古くより、リアプノフ指数と呼ばれる指標が用いられている。リアプノフ指数は、データ生成源の方程式の特徴に基づき計算されるため、データ生成源(データを生成する方程式等)が未知の場合は、大量のデータと煩雑な手続きを経由して推定する必要があり、容易に得られるものではなかった。特に、リアルタイム処理を行う場合にリアプノフ指数を採用することは、困難であり、実際的には不可能であった。
【0003】
上記のリアプノフ指数に対し、カオス尺度と称される以下の手法が知られている。カオス尺度においては、τを直線上で定義された写像を
TIFF
2024049157000002.tif
16
75
とし、初期値ξ
0
∈Iに対して、
ξ
t
=τ(ξ
t-1
)=τ
t
(ξ
0
),t=1,2,・・・,n
によるn回の反復によって得られた、合計n+1個の時系列データを
{ξ
0
,ξ
1
,ξ
2
,・・・,ξ
n
}
とし、ξ
t
が含まれる区間IをM等分した分割区間を、A
i
(i=1,2,・・・,M)で表したとき、分割区間は、以下の式(1)を満たすとき、
TIFF
2024049157000003.tif
16
149
c
1
(i),c
2
(i,j)から、p(i),p(i,j),p(j|i)を、算出する。
c
1
(i)=#{ξ
t
∈A
i
|t=0,1,2,・・・,n-1}・・・(2)
c
2
(i,j)=#{ξ
t
∈A
i
,ξ
t+1
∈A
j
|t=0,1,2,・・・,n-1}・・・(3)
上記の式(2)に関しては図1(a)にカウンタc
1
(i)の写像領域と区間番号を示し、上記の式(3)に関しては図1(b)にカウンタc
2
(i,j)の写像領域と区間番号を示す。
TIFF
2024049157000004.tif
49
129
上記において、p(i)はξ
t
∈A
i
となる確率であり、p(i,j)は、ξ
t
∈A
i
,ξ
t+1
∈A
j
となる確率であり、p(j|i)は、ξ
t
∈A
i
,ξ
t+1
∈A
j
となる条件付き確率である。
【0004】
上記を前提とし、カオス尺度Hは、以下の定義式(7)に対して、式(8)により計算される。
TIFF
2024049157000005.tif
34
120
ただし、
0log0=0
とする。以上は、非特許文献1に記載されたカオス尺度を説明したものである。
【0005】
上記カオス尺度に対し、発明者らは修正カオス尺度なる指標を提起し、時系列データのカオス度合を定量化することを試みた(特許文献1参照)。以下、修正カオス尺度について説明する。τを直線上で定義された写像τを
TIFF
2024049157000006.tif
15
59
とし、初期値ξ
0
∈Iに対して、
ξ
t
=τ(ξ
t-1
)=τ
t
(ξ
0
),t=1,2,・・・,n
によるn回の反復によって得られた、合計n+1個の時系列データを
{ξ
0
,ξ
1
,ξ
2
,・・・,ξ
n
}
とし、ξ
t
が含まれる区間IをM等分した分割区間を、A
i
(i=1,2,・・・,M)で表したとき、分割区間は、以下の式(1)を満たすとき、
TIFF
2024049157000007.tif
21
158
c
1
(i),c
2
(i,j)から、p(i),p(i,j),p(j|i)を、算出する。
c
1
(i)=#{ξ
t
∈A
i
|t=0,1,2,・・・,n-1}・・・(2)
c
2
(i,j)=#{ξ
t
∈A
i
,ξ
t+1
∈A
j
|t=0,1,2,・・・,n-1}・・・(3)
図1(a)にカウンタc
1
(i)の写像領域と区間番号を示し、図1(b)にカウンタc
2
(i,j)の写像領域と区間番号を示す。
TIFF
2024049157000008.tif
54
122
上記において、p(i)はξ
t
∈A
i
となる確率であり、p(i,j)は、ξ
t
∈A
i
,ξ
t+1
∈A
j
となる確率であり、p(j|i)は、ξ
t
∈A
i
,ξ
t+1
∈A
j
となる条件付き確率である。
ここまでは、カオス尺度と同様であり、以下が修正カオス尺度に固有なものである。
【0006】
分割区間A
i
(i=1,2,・・・,M)を更にQ等分に分割した細分割区間B
i
(i=1,2,・・・,M×Q)を設定する。図2に、分割区間A
i
と実データが存在する細分割区分B
i
、の関係が示されている。
TIFF
2024049157000009.tif
38
144
である。この式は、分割区間A
i
(i=1,2,・・・,M)と、これを更にQ等分に分割した細分割区間B
i
関係を示している。
【0007】
ここで、図3に示すように、実測度の分割区間A
i
と実測度の細分割区間B
i
、及び細分割区間について有測度区間の測度を1とした場合に、分割区間A
i
において有測度の細分割区間B
i
が占める割合q(i,j)を、以下のc
3
(i,j),u
3
(i,j),u
2
(i,j)から求める。この割合q(i,j)は、「ノルム比」と称されるものである。
c
3
(i,j)=#{ξ
t
∈A
i
,ξ
t+1
∈B
j
|t=0,1,2,・・・,n-1}・・・(10)
TIFF
2024049157000010.tif
46
115
【0008】
修正カオス尺度H
*
は、以下の定義式(14)に対して、式(16)に示す数式として得られる。
TIFF
2024049157000011.tif
71
152
【0009】
上記のカオス尺度Hを求める計算式と、修正カオス尺度H
*
を求める計算式を比較すると、修正カオス尺度H
*
を求める計算式はカオス尺度Hを求める計算式に対し、
TIFF
2024049157000012.tif
20
102
が加わったものであることが判る。
以上は、特許文献1に記載された修正カオス尺度を説明したものである。
【0010】
更に、発明者らは時系列データのカオス度合を定量化する手法として特許文献2に記載の手法と特許文献3に記載の手法を提供した。特許文献2に記載の手法は、修正カオス尺度の場合と同じように細分割区間(M×Q分割)を導入し、細分割単位で分割エントロピーを計算するものである。修正カオス尺度の場合に式(17)を加えたのに対し、特許文献2に記載の手法では、
TIFF
2024049157000013.tif
15
74
を加える。また、この特許文献2に記載の手法は計算アルゴリズムかシンプルであるという特徴を有しており、かつ、修正カオス尺度の手法とほぼ同程度の性能を有している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
乗降調査装置
1か月前
個人
プロジェクター
15日前
個人
管理装置
20日前
日本精機株式会社
投影装置
1か月前
キヤノン電子株式会社
周辺機器
7日前
日本精機株式会社
投影システム
1か月前
個人
求人マッチングサーバ
7日前
カゴメ株式会社
営農支援プログラム
6日前
カゴメ株式会社
営農支援プログラム
6日前
17LIVE株式会社
サーバ
1か月前
カゴメ株式会社
営農支援プログラム
6日前
カゴメ株式会社
営農支援プログラム
6日前
アスエネ株式会社
水管理の方法
7日前
株式会社ゼロボード
価格決定システム
1か月前
株式会社ワコム
電子ペン
2日前
トヨタ自動車株式会社
検査装置
20日前
株式会社ワコム
電子ペン
今日
CKD株式会社
遠隔支援システム
7日前
株式会社寺岡精工
システム
2日前
株式会社NGA
画像投稿システム
20日前
株式会社アジラ
姿勢推定システム
1か月前
大日本印刷株式会社
作業台
5日前
個人
ポイント増量アプリ「太陽光銭サー」
14日前
日本信号株式会社
自転車貸出システム
1か月前
株式会社小野測器
移動量計測システム
9日前
株式会社小野測器
移動量計測システム
27日前
BH株式会社
商品販売システム
7日前
株式会社三富
取引管理システム
15日前
日本電気株式会社
勤務管理装置
1か月前
個人
言語翻訳システム及びプログラム
27日前
日本信号株式会社
所持物検査装置
1か月前
トヨタ自動車株式会社
サーバ装置
1か月前
富士通株式会社
プロセッサ
29日前
日本電気株式会社
端末及び認証システム
1か月前
トヨタ自動車株式会社
燃料購入システム
1か月前
個人
集配システムと保管システム
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ