TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024042614
公報種別
公開特許公報(A)
公開日
2024-03-28
出願番号
2022147457
出願日
2022-09-15
発明の名称
フォーカス制御装置、撮像装置およびフォーカス制御方法
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G02B
7/28 20210101AFI20240321BHJP(光学)
要約
【課題】適切なピント追従判定が行うフォーカス制御装置を提供する。
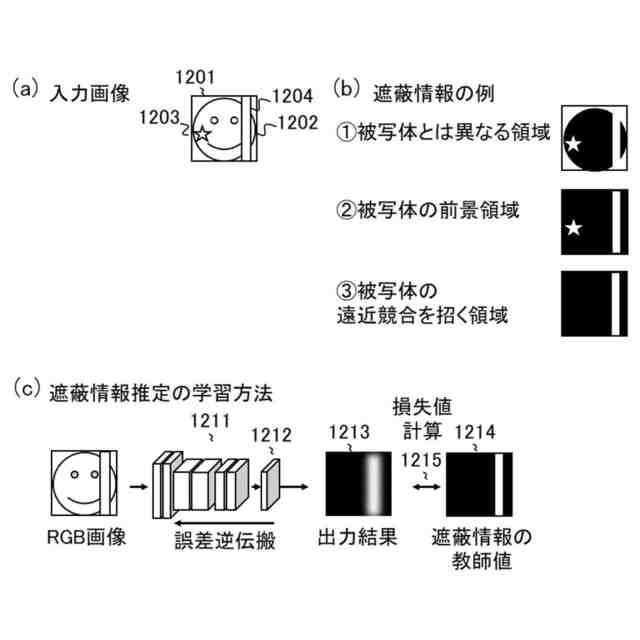
【解決手段】フォーカス制御装置は、撮像画角内においてデフォーカス量を検出する検出領域内の被写体に対するピント追従を行う。フォーカス制御装置は、デフォーカス量に関する情報を用いてピント追従を行うか否かを判定するピント追従判定を行う判定手段2121と、撮像により生成された画像データから被写体に対する遮蔽物に関する情報を取得する取得手段2125とを有する。判定手段は、検出領域において取得された遮蔽物に関する情報を用いてピント追従判定を行う。
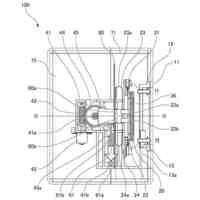
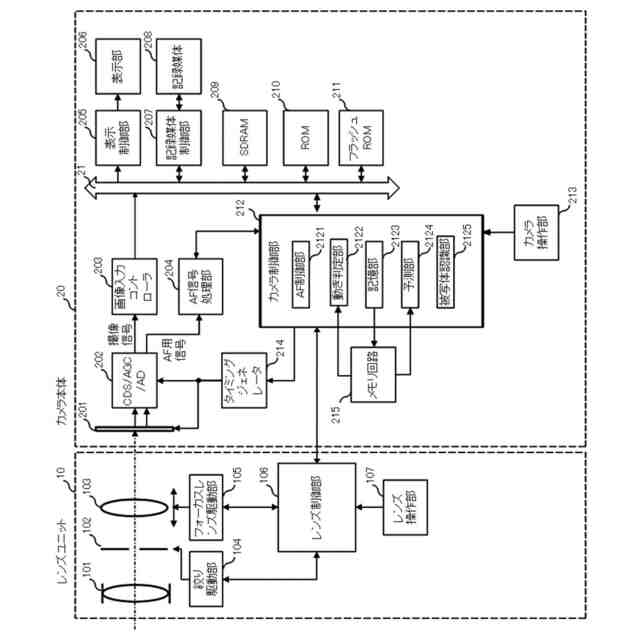
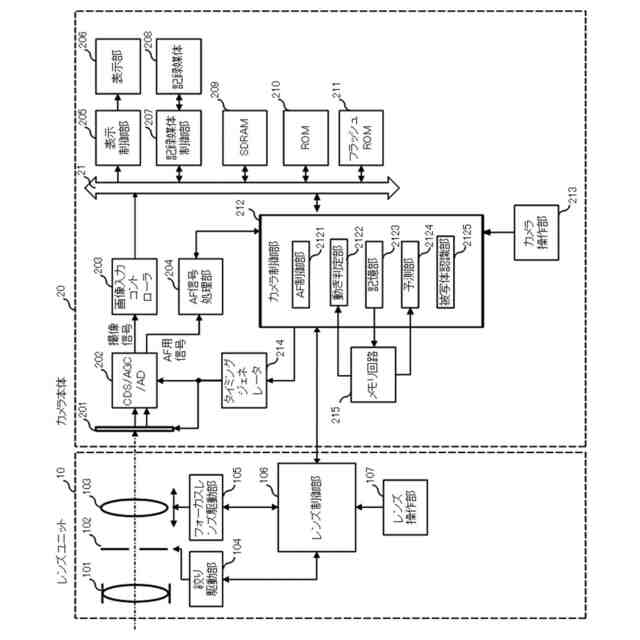
【選択図】図1
特許請求の範囲
【請求項1】
撮像画角内においてデフォーカス量を検出する検出領域内の被写体に対するピント追従を行うフォーカス制御装置であって、
前記デフォーカス量に関する情報を用いて前記ピント追従を行うか否かを判定するピント追従判定を行う判定手段と、
撮像により生成された画像データから前記被写体に対する遮蔽物に関する情報を取得する取得手段とを有し、
前記判定手段は、前記検出領域において取得された前記遮蔽物に関する情報を用いて前記ピント追従判定を行うことを特徴とするフォーカス制御装置。
続きを表示(約 1,700 文字)
【請求項2】
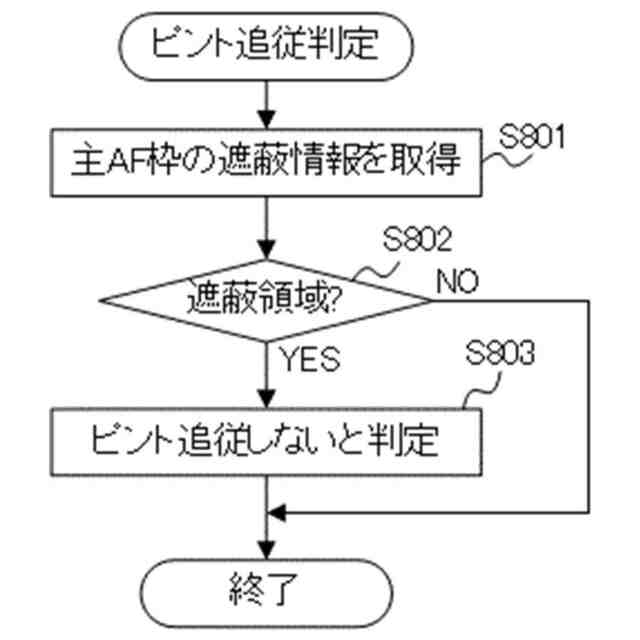
前記判定手段は、前記検出領域で前記遮蔽物に関する情報が取得されない場合は前記ピント追従を行うと判定し、前記検出領域で前記遮蔽物に関する情報が取得された場合は前記ピント追従を行わないと判定することを特徴とする請求項1に記載のフォーカス制御装置。
【請求項3】
前記判定手段は、前記検出領域で取得された前記遮蔽物に関する情報が前記遮蔽物が特定被写体であることを示す場合は前記特定被写体に対する前記ピント追従を行うと判定し、前記検出領域で取得された前記遮蔽物に関する情報が前記遮蔽物が前記特定被写体ではないことを示す場合は前記ピント追従を行わないと判定することを特徴とする請求項1に記載のフォーカス制御装置。
【請求項4】
前記判定手段は、前記検出領域で取得された前記遮蔽物に関する情報が前記遮蔽物が特定被写体であることを示し、かつ前記ピント追従を行う被写体の切り替えが許容されている場合に前記特定被写体に対する前記ピント追従を行うと判定することを特徴とする請求項3に記載のフォーカス制御装置。
【請求項5】
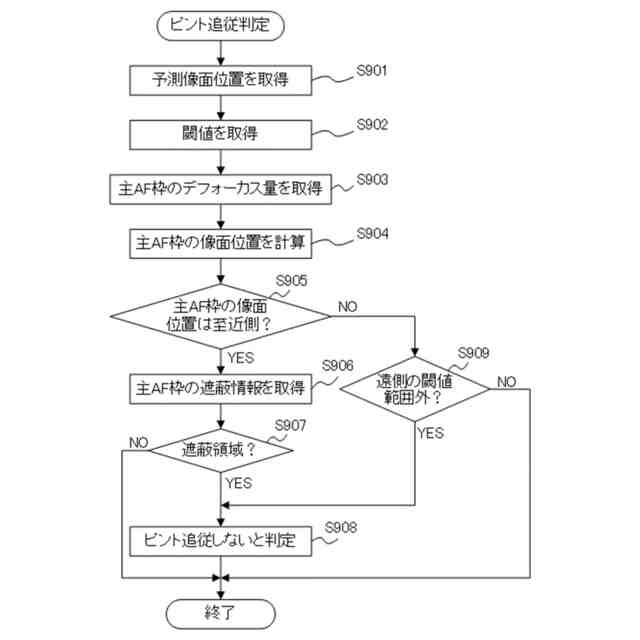
前記判定手段は、前記検出領域で取得された前記デフォーカス量に関する情報が前記被写体よりも近側を示す場合に、前記遮蔽物に関する情報を取得することを特徴とする請求項1に記載のフォーカス制御装置。
【請求項6】
前記フォーカス制御装置は、前記デフォーカス量に関する情報が所定範囲内である場合に前記ピント追従を行い、
前記判定手段は、前記検出領域で取得された前記デフォーカス量に関する情報が前記所定範囲よりも遠側を示す場合は、前記遮蔽物に関する情報を用いずに前記ピント追従判定を行うことを特徴とする請求項1に記載のフォーカス制御装置。
【請求項7】
前記取得手段は、
前記画像データのフレームごとに前記遮蔽物に関する情報を取得することが可能であり、
前記遮蔽物に関する情報が取得されたフレームにおける前記デフォーカス量に関する情報を記憶し、
前記遮蔽物に関する情報が取得されないフレームにおいて、前記記憶されたデフォーカス量に関する情報を用いて前記遮蔽物に関する情報を取得することを特徴とする請求項1に記載のフォーカス制御装置。
【請求項8】
前記取得手段は、前記遮蔽物に関する情報が取得されないフレームにおいて、前記記憶されたデフォーカス量に関する情報との差分または前記記憶されたデフォーカス量に関する情報を用いて予測したデフォーカス量に関する情報との差分が所定値以下となる前記デフォーカス量に関する情報に基づいて前記遮蔽物に関する情報を取得することを特徴とする請求項7に記載のフォーカス制御装置。
【請求項9】
前記取得手段は、コンボリューショナル・ニューラル・ネットワークを用いて前記遮蔽物に関する情報を取得することを特徴とする請求項1に記載のフォーカス制御装置。
【請求項10】
前記検出領域内の被写体が動体か非動体かを判定する動体判定手段と、
フォーカス制御を行う制御手段とを有し、
前記制御手段は、
前記ピント追従を行うと判定された場合において、前記検出領域内の被写体が非動体であると判定されたときは該非動体に対して検出されたデフォーカス量に基づいて前記フォーカス制御を行い、動体であると判定されたときは該動体に対して検出されたデフォーカス量を用いて予測したデフォーカス量に基づいて前記フォーカス制御を行い、
前記ピント追従を行わないと判定された場合において、前記検出領域内の被写体が非動体であると判定されたときは前記フォーカス制御を行わず、動体であると判定されたときは前記ピント追従を行わないと判定された際の前記デフォーカス量を用いずに予測したデフォーカス量を用いて前記フォーカス制御を行うことを特徴とする請求項1に記載のフォーカス制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、デジタルカメラ等の撮像装置において用いられる焦点検出技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
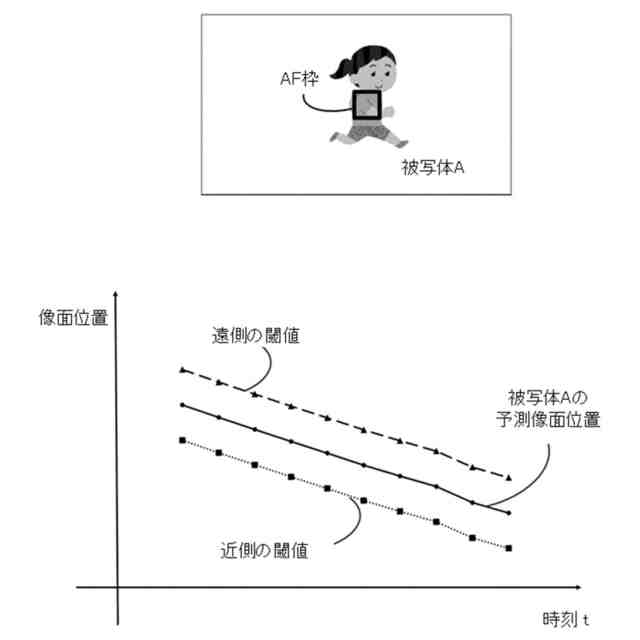
被写体に対する撮像光学系のデフォーカス量の検出結果に基づいて撮像光学系に対して行われるフォーカス制御には、移動被写体に対するフォーカシングに適したサーボモードがある。サーボモードでは、特許文献1にて開示されているように、過去の複数の時刻での像面位置の変化に対応する関数を求め、該関数から次の時刻での予測像面位置を求める動体予測を行って移動被写体に対するピント追従を行う。
【0003】
特許文献2には、予測像面位置に対する許容デフォーカス量を設定し、検出デフォーカス量が許容デフォーカス量以下か否かにより検出デフォーカス量に基づくピント追従を行うか行わないかの判定(ピント追従判定)を行うフォーカス制御が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2001-021794号公報
特開2019―020716号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
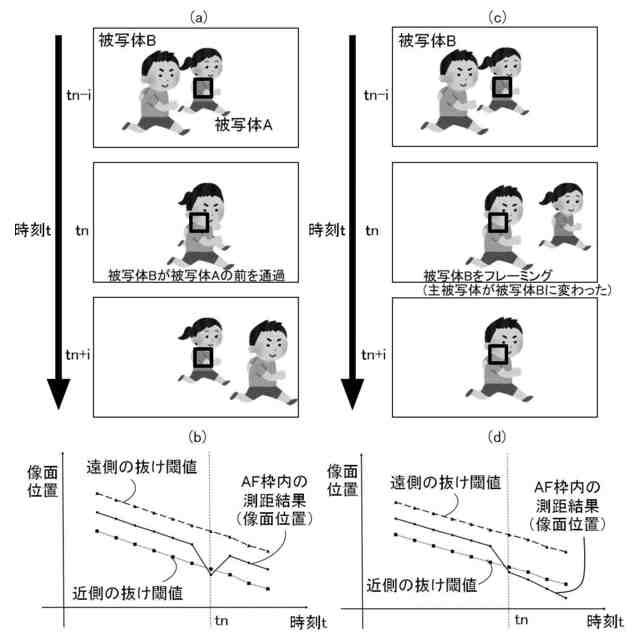
ピント追従判定は、カメラのユーザが撮像対象としてフレーミングしている主被写体の手前を障害物が通過したり主被写体に対するフレーミングを失敗したりした場合でも不用意なピント移動を生じさせないために行われる。しかしながら、ピント追従判定においてユーザの意思に反したピント追従を行うか否かの判定がなされる場合がある。例えば、主被写体に近い手前位置を通過した障害物に対する検出デフォーカス量が許容デフォーカス量以下であれば障害物に対してピント追従が行われる。また、ユーザが意図してデフォーカス差が大きい別の主被写体に対してフレーミングした場合に、その新たな主被写体にピント追従が行われない。このように、検出デフォーカス量だけで正しいピント追従判定を行うのが困難な場合がある。
【0006】
本発明は、適切なピント追従判定が行えるようにしたフォーカス制御装置およびフォーカス制御方法を提供する。
【課題を解決するための手段】
【0007】
本発明の一側面としてのフォーカス制御装置は、撮像画角内においてデフォーカス量を検出する検出領域内の被写体に対するピント追従を行う。該フォーカス制御装置は、デフォーカス量に関する情報を用いてピント追従を行うか否かを判定するピント追従判定を行う判定手段と、撮像により生成された画像データから被写体に対する遮蔽物に関する情報を取得する取得手段とを有する。判定手段は、検出領域において取得された遮蔽物に関する情報を用いてピント追従判定を行うことを特徴とする。なお、上記フォーカス制御装置を有する光学機器も、本発明の他の一側面を構成する。
【0008】
また本発明の他の一側面としてのフォーカス制御方法は、撮像画角内においてデフォーカス量を検出する検出領域内の被写体に対するピント追従を行う。該フォーカス制御方法は、デフォーカス量に関する情報を用いてピント追従を行うか否かを判定するピント追従判定を行うステップと、撮像により生成された画像データから被写体に対する遮蔽物に関する情報を取得するステップとを有する。ピント追従判定を行うステップにおいて、検出領域において取得された遮蔽物に関する情報を用いてピント追従判定を行うことを特徴とする。なお、コンピュータに上記フォーカス制御方法に従う処理を実行させるプログラムも、本発明の他の一側面を構成する。
【発明の効果】
【0009】
本発明によれば、適切なピント追従判定を行うことができる。
【図面の簡単な説明】
【0010】
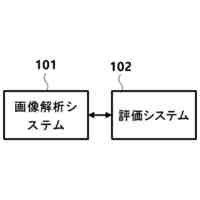
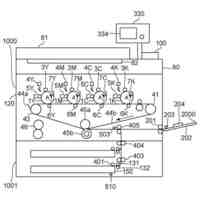
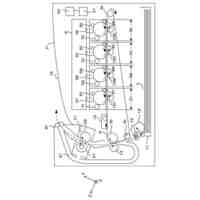
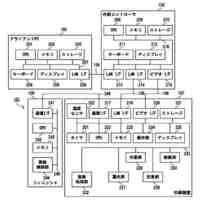
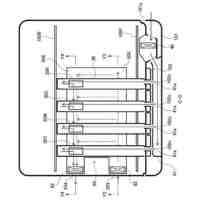
実施例1のレンズ交換式カメラシステムの構成を示すブロック図。
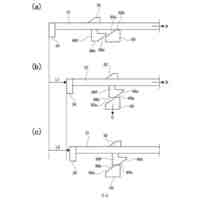
実施例1における遮蔽情報を説明する図。
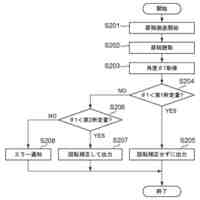
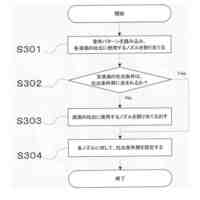
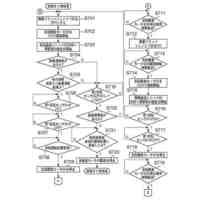
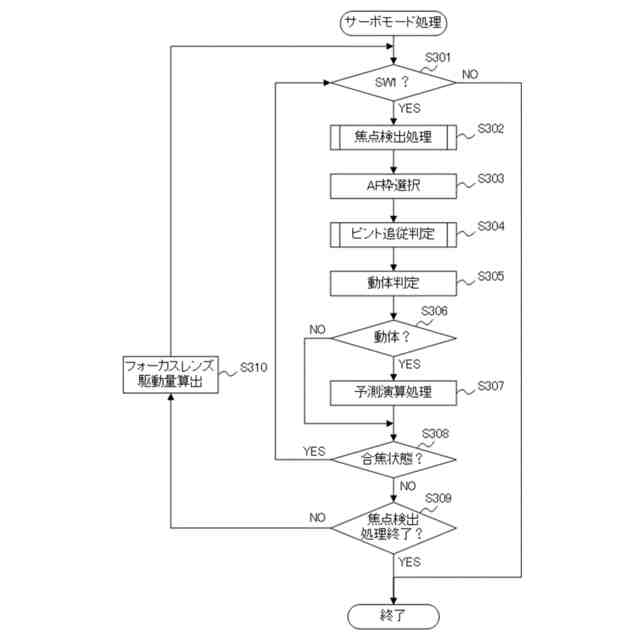
実施例1におけるサーボモード処理を示すフローチャート。
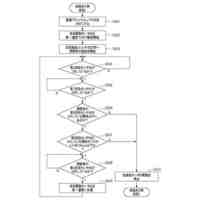
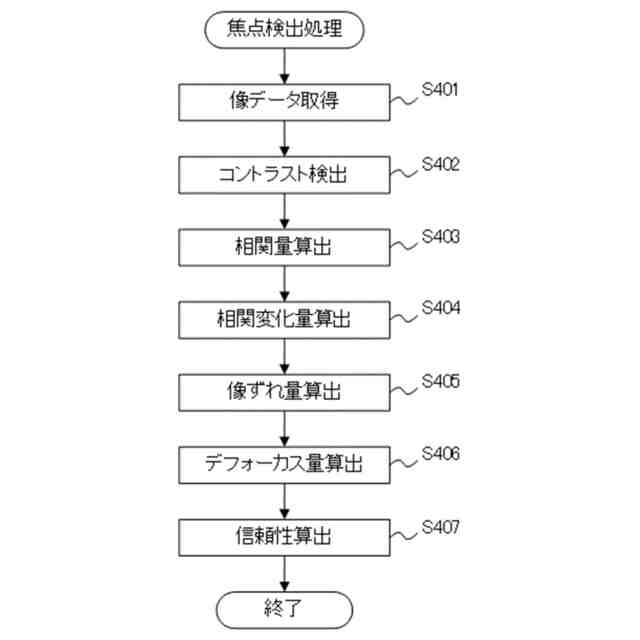
実施例1における焦点検出処理を示すフローチャート。
実施例1における被写体像面位置の変化を示す図。
実施例1における被写体に対するフレーミングの変化を示す図。
図6における遮蔽情報を示す図。
遮蔽情報のみを用いたピント追従判定を示すフローチャート。
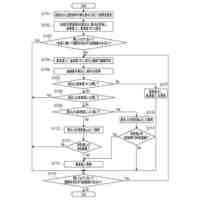
実施例1におけるピント追従判定を示すフローチャート。
実施例2におけるピント追従判定を示すフローチャート。
実施例2において遮蔽領域が検出被写体である場合と検出被写体でない場合の遮蔽情報を示す図。
実施例2における被写体A、B、Cの時系列変化と遮蔽情報を示す図。
実施例2において時刻tnにて被写体Aが検出されなくなった場合の遮蔽情報を示す図。
図13における像面位置を示す図。
実施例2において遮蔽領域のデフォーカス量を探索する範囲を説明する図。
実施例2において時刻tnでの遮蔽領域の像面位置Pnの予測を説明する図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
13日前
キヤノン株式会社
トナー
13日前
キヤノン株式会社
梱包箱
20日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
発光装置
6日前
キヤノン株式会社
表示装置
19日前
キヤノン株式会社
電子機器
4日前
キヤノン株式会社
評価方法
21日前
キヤノン株式会社
光学機器
4日前
キヤノン株式会社
記録装置
18日前
キヤノン株式会社
撮像装置
13日前
キヤノン株式会社
記録装置
11日前
キヤノン株式会社
カメラ装置
4日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
有機発光素子
11日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
21日前
キヤノン株式会社
画像形成装置
21日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
液滴吐出装置
4日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ