TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024038969
公報種別
公開特許公報(A)
公開日
2024-03-21
出願番号
2023003664
出願日
2023-01-13
発明の名称
数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法
出願人
山東科技大学
代理人
個人
主分類
G05B
19/416 20060101AFI20240313BHJP(制御;調整)
要約
【課題】工作機械のエネルギー利用率を向上させ、工作機械の頻繁な起動停止による主駆動システム及びモータに与える損失を回避する。
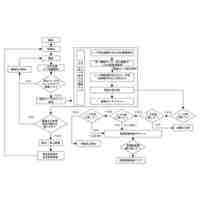
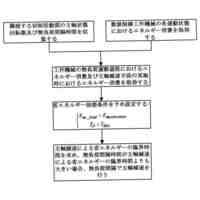
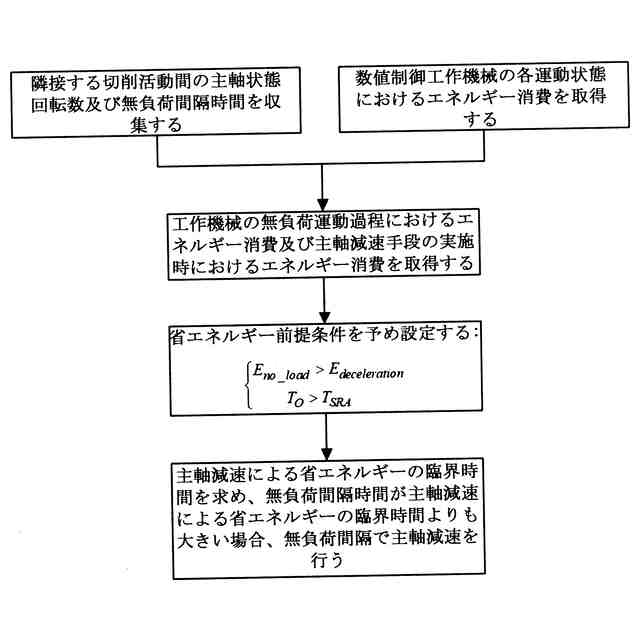
【解決手段】隣接する切削活動間の主軸回転数及び無負荷間隔時間を収集するステップと、数値制御工作機械の各運動状態におけるエネルギー消費を取得するステップと、主軸状態回転数及び工作機械の各運動状態におけるエネルギー消費に基づいて、工作機械の無負荷運動過程におけるエネルギー消費及び主軸減速手段の実施時におけるエネルギー消費を取得するステップと、省エネルギー前提条件を予め設定し、工作機械の無負荷運動過程におけるエネルギー消費、主軸減速手段の実施時におけるエネルギー消費及び無負荷間隔時間が省エネルギー前提条件を満たすと、主軸減速による省エネルギーの臨界時間を求め、無負荷間隔時間が主軸減速による省エネルギーの臨界時間よりも大きい場合、無負荷間隔で主軸減速を行うステップと、を含む。
【選択図】図1
特許請求の範囲
【請求項1】
隣接する切削活動間の主軸状態回転数及び無負荷間隔時間を収集するステップと、
数値制御工作機械の各運動状態におけるエネルギー消費を取得するステップと、
前記主軸状態回転数及び前記数値制御工作機械の各運動状態におけるエネルギー消費に基づいて、工作機械の無負荷運動過程におけるエネルギー消費及び主軸減速手段の実施時におけるエネルギー消費を取得するステップと、
省エネルギー前提条件を予め設定し、前記工作機械の無負荷運動過程におけるエネルギー消費、主軸減速手段の実施時におけるエネルギー消費及び前記無負荷間隔時間が前記省エネルギー前提条件を満たすと、主軸減速による省エネルギーの臨界時間を求め、前記無負荷間隔時間が前記主軸減速による省エネルギーの臨界時間よりも大きい場合、無負荷間隔で主軸減速を行うステップと、を含む、
ことを特徴とする数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法。
続きを表示(約 2,800 文字)
【請求項2】
前記主軸状態回転数は、主軸初期回転数と、主軸目標回転数と、主軸減速後の回転数と、を含むことを特徴とする請求項1に記載の数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法。
【請求項3】
前記数値制御工作機械の各運動状態におけるエネルギー消費は、工作機械の基本モジュールによるエネルギー消費と、工作機械の主軸の定速回転運動によるエネルギー消費と、工作機械の主軸加速運動におけるエネルギー消費と、を含み、
前記工作機械の基本モジュールによるエネルギー消費は、以下の式に示され、
TIFF
2024038969000022.tif
19
168
そのうち、E
standby
は、工作機械の基本モジュールによるエネルギー消費であり、P
standby
は、工作機械の基本モジュールの動作を維持するときの電力であり、P
standby_i
は、実験装置の第i番目に収集した工作機械の基本モジュールの電力値であり、Nは、データ収集の回数であり、T
standby
は、工作機械の基本モジュールの動作を維持する時間であり、
前記工作機械の主軸の定速回転運動によるエネルギー消費は、以下の式に示され、
TIFF
2024038969000023.tif
14
168
そのうち、E
spindle
は、工作機械の主軸の定速回転運動によるエネルギー消費であり、P
spindle
は、工作機械の主軸の定速回転運動時の電力であり、nは、主軸回転数であり、A
sp
及びB
sp
は、式の係数であり、T
spindle
は、主軸の定速回転運動を維持する時間であり、
前記工作機械の主軸加速運動によるエネルギー消費は、以下の式に示され、
TIFF
2024038969000024.tif
23
170
そのうち、E
SRA
は、工作機械の主軸加速運動によるエネルギー消費であり、T
s
は、主軸システムが主軸に相当する加速トルクであり、αは、主軸角加速度であり、n
1
は、主軸初期回転数であり、n
2
は、主軸目標回転数であり、T
SRA1
は、主軸加速開始から電力ピーク時間帯までの時間であり、T
SRA2
は、電力ピークから定常電力時間帯までの移行時間であることを特徴とする請求項1に記載の数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法。
【請求項4】
工作機械の無負荷運動過程におけるエネルギー消費及び主軸減速手段の実施時におけるエネルギー消費を取得することは、
主軸回転加速過程の時間を取得するステップと、
前記主軸初期回転数、前記主軸目標回転数、前記数値制御工作機械の各運動状態におけるエネルギー消費、及び前記主軸回転加速過程の時間に基づいて、前記工作機械の無負荷運動過程におけるエネルギー消費を取得するステップと、
前記主軸減速後の回転数、前記主軸目標回転数、前記数値制御工作機械の各運動状態におけるエネルギー消費及び前記主軸回転加速過程の時間に基づいて、前記主軸減速手段の実施時におけるエネルギー消費を取得するステップと、を含むことを特徴とする請求項3に記載の数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法。
【請求項5】
前記主軸加速開始から電力ピーク時間帯までの時間、及び前記電力ピークから定常電力時間帯までの移行時間に基づいて、前記主軸回転加速過程の時間を求めることを特徴とする請求項4に記載の数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法。
【請求項6】
前記工作機械の無負荷運動過程におけるエネルギー消費は、以下の式に示され、
TIFF
2024038969000025.tif
41
170
そのうち、E
no_load
は、工作機械の無負荷運動過程におけるエネルギー消費であり、T
o
は、無負荷間隔時間であることを特徴とする請求項4に記載の数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法。
【請求項7】
前記主軸減速手段の実施時におけるエネルギー消費は、以下の式に示され、
TIFF
2024038969000026.tif
43
170
そのうち、E
deceleration
は、主軸減速手段の実施時におけるエネルギー消費であり、n
i
は、主軸減速後の回転数であることを特徴とする請求項4に記載の数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法。
【請求項8】
前記省エネルギー前提条件は、
前記主軸減速手段の実施時におけるエネルギー消費は、前記工作機械の無負荷運動過程におけるエネルギー消費よりも小さく、前記主軸回転加速過程の時間は、前記無負荷間隔時間よりも小さいことであることを特徴とする請求項4に記載の数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法。
【請求項9】
前記主軸減速による省エネルギーの臨界時間は、工作機械が加工動作状態のまま動作したときのエネルギー需要と、主軸が減速した後に目標回転数まで再加速するときのエネルギー需要とが等しくなるときに要する時間であることを特徴とする請求項1に記載の数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法。
【請求項10】
無負荷間隔において前記主軸減速を行うための省エネルギー量は、以下の式に示され、
TIFF
2024038969000027.tif
13
168
そのうち、E
saving
は、省エネルギー量であり、E
no_load
は、工作機械の無負荷運動過程のエネルギー消費であり、E
deceleration
は、主軸減速手段の実施時のエネルギー消費であることを特徴とする請求項1に記載の数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、機械製造技術の分野に属し、特に数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
数値制御工作機械は、機械製造業におけるエネルギー消費及び炭素排出の主要な行業として、省エネルギー・排出削減において、重要な役割を果たす。一方、多くの検討の結果から、工作機械設備のエネルギー平均利用率は、低くて、平均30%を下回ることが分かった。これにより、工作機械設備の省エネルギー問題を探究することは、極めて重要な理論指導意義と実際の応用価値を有し、機械製造業の省エネルギー・排出削減の円滑な推進に寄与する。
【0003】
数値制御工作機械は、ワークの加工過程に、切込み、逃げ、工具交換などの無負荷の運動中、主駆動システムが加工状態になく、完全にエネルギーを浪費するプロセスであり、工作機械設備のエネルギーの利用率を低下させる要因の1つである。このため、CN200810070302.0にて開示される「数値制御工作機械の隣接する作業ステップ
間の無負荷動作時における機械停止による省エネルギーの実施方法」と題された発明特許は、機械を停止させて再起動し、機械の製造過程における工作機械の無負荷動作中の時間とエネルギー消費を減少させることにより、省エネルギーを図る数値制御工作機械の無負荷動作時における機械停止による省エネルギー方法を開示する。CN202011128991.3にて開示される「数値制御工作機械の主軸動作停止による省エネルギーの臨界時間決定及び省エネルギー方法」と題された発明特許は、数値制御工作機械の無負荷動作時における主軸動作停止による省エネルギー方法」を提供し、主軸初期回転数と目標回転数に基づいて、主軸動作停止による省エネルギーの臨界時間と省エネルギー効果を算出することができる。
【0004】
上記数値制御工作機械の無負荷動作過程の省エネルギー方法は、工作機械停止による省エネルギーか、又は主軸動作停止による省エネルギーかが、いずれも省エネルギー効果を達成することができるが、実際の現場作業において、工作機械の頻繁な起動停止は、工作機械の主駆動システム及び工作機械モータに一定の衝撃を与え、ひいては工作機械の耐用年数に影響を及ぼす。工作機械の耐用年数を犠牲にした省エネルギー効果は、得より損の方が大きい。したがって、数値制御工作機械の無負荷動作過程におけるエネルギー浪費の問題に対して、効果的な省エネルギー解決策が現在のところ存在しない。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記技術的問題を解決するために、数値制御工作機械の無負荷動作時における主軸回転数を低下させて、工作機械の無負荷過程におけるエネルギー消費を減少させることにより、工作機械のエネルギー利用率を向上させ、さらに工作機械の頻繁な起動停止による主駆動システム及びモータに与える損失を回避する、数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法を提供する。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明にて提供される数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法は、
隣接する切削活動間の主軸状態回転数及び無負荷間隔時間を収集するステップと、
数値制御工作機械の各運動状態におけるエネルギー消費を取得するステップと、
前記主軸状態回転数及び前記数値制御工作機械の各運動状態におけるエネルギー消費に基づいて、工作機械の無負荷運動過程におけるエネルギー消費及び主軸減速手段の実施時におけるエネルギー消費を取得するステップと、
省エネルギー前提条件を予め設定し、前記工作機械の無負荷運動過程におけるエネルギー消費、主軸減速手段の実施時におけるエネルギー消費及び前記無負荷間隔時間が前記省エネルギー前提条件を満たすと、主軸減速による省エネルギーの臨界時間を求め、前記無負荷間隔時間が前記主軸減速による省エネルギーの臨界時間よりも大きい場合、無負荷間隔で主軸減速を行うステップと、を含む。
【0007】
さらに、前記主軸状態回転数は、主軸初期回転数と、主軸目標回転数と、主軸減速後の回転数と、を含む。
【0008】
さらに、前記数値制御工作機械の各運動状態におけるエネルギー消費は、工作機械の基本モジュールによるエネルギー消費と、工作機械の主軸の定速回転運動によるエネルギー消費と、工作機械の主軸加速運動におけるエネルギー消費と、を含み、
前記工作機械の基本モジュールによるエネルギー消費は、以下の式に示され、
【0009】
TIFF
2024038969000002.tif
17
168
【0010】
そのうち、E
standby
は、工作機械の基本モジュールによるエネルギー消費であり、P
standby
は、工作機械の基本モジュールの動作を維持するときの電力であり、P
standby_i
実験装置の第i番目に収集した工作機械の基本モジュールの電力値であり、Nは、データ収集の回数であり、T
tandby
は、工作機械の基本モジュールの動作を維持する時間であり、
前記工作機械の主軸の定速回転運動によるエネルギー消費は、以下の式に示され、
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
山東科技大学
切羽面液圧支保架台群状態検知記述方法
11か月前
山東科技大学
切羽面液圧支保架台位置精度チェック方法
11か月前
山東科技大学
非等方性を考慮した水平方向対流圏遅延分類方法
2か月前
山東科技大学
食品保存取出システム、方法及びスマート冷蔵庫
4か月前
山東科技大学
レーザードップラー振動測定に基づく外壁断熱層の空洞検出方法及び装置
3か月前
山東科技大学
数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法
11か月前
山東科技大学
ショートウォール連続採掘連続充填における材料の流動パターンをシミュレーションする実験装置及び方法
6か月前
個人
無人作業システム
1か月前
アズビル株式会社
制御装置
24日前
村田機械株式会社
産業機械
1か月前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
2か月前
コフロック株式会社
流量制御装置
25日前
トヨタ自動車株式会社
自律移動体
1か月前
トヨタ自動車株式会社
配送システム
2か月前
株式会社丸和製作所
入力機器
24日前
株式会社クボタ
作業車
1か月前
株式会社豊田自動織機
荷役車両
17日前
株式会社明電舎
車両
1か月前
株式会社フジキン
流量制御装置
24日前
株式会社フジキン
流体制御装置
2か月前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社シンテックホズミ
搬送ロボット
6日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社村田製作所
温度補償回路
1か月前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社ダイフク
物品搬送設備
10日前
株式会社ダイフク
物品搬送設備
1か月前
ローム株式会社
電源回路
2か月前
キヤノン株式会社
情報処理装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ