TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024043568
公報種別
公開特許公報(A)
公開日
2024-04-01
出願番号
2023061963
出願日
2023-04-06
発明の名称
切羽面液圧支保架台位置精度チェック方法
出願人
山東科技大学
代理人
個人
主分類
E21D
23/16 20060101AFI20240325BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】切羽面液圧支保架台位置精度チェック方法を提供する。
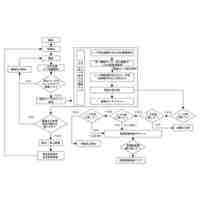
【解決手段】切羽面液圧支保架台位置精度チェック方法は、対象支保に対する位置検出誤差Δと、L1水準閾値δ1と、L2水準閾値δ2と、L3水準閾値δ3と、それぞれ定義するステップS1と、(1)連続的な複数の対象支保の間で、Δ≦δ1の場合に、検出結果がL1水準であると判定し、(2)対象支保がδ1<Δ≦δ2の場合に、検出結果がL2水準であると判定し、(3)対象支保がδ2<Δ≦δ3の場合に、検出結果がL3水準であると判定し、(4)対象支保がΔ>δ3の場合に、検出結果がL4水準であると判定する、ステップS2と、を含む。切羽面液圧支保群の直線度に対し、隣接する支保の位置精度チェック及び間隔をおく支保の累積誤差検査を行うことによって、液圧支保に対する位置記述の正確性を高め、切羽面液圧支保群の位置の直線度を確保することができる。
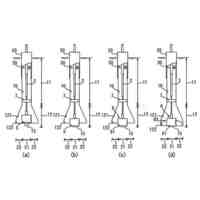
【選択図】図11
特許請求の範囲
【請求項1】
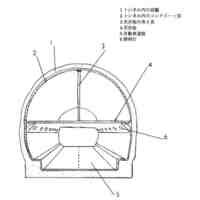
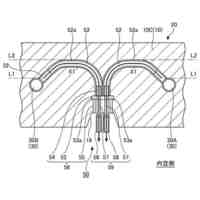
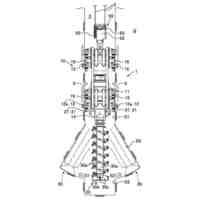
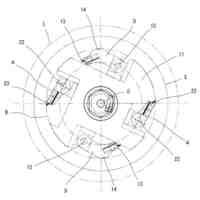
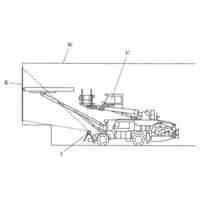
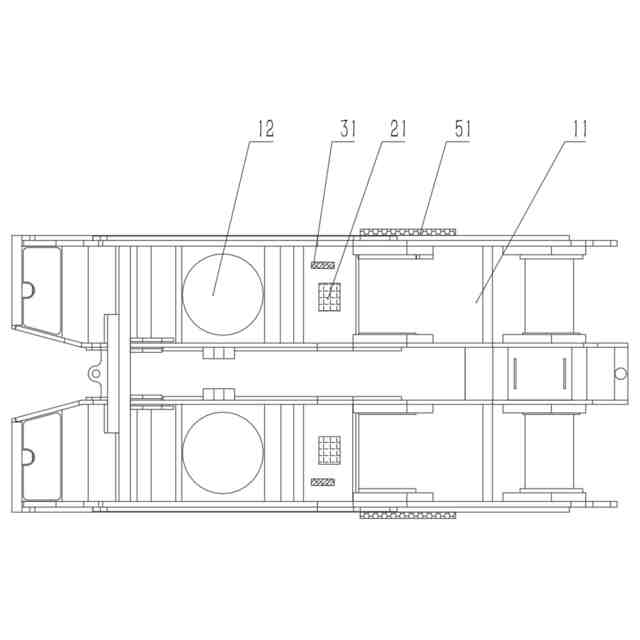
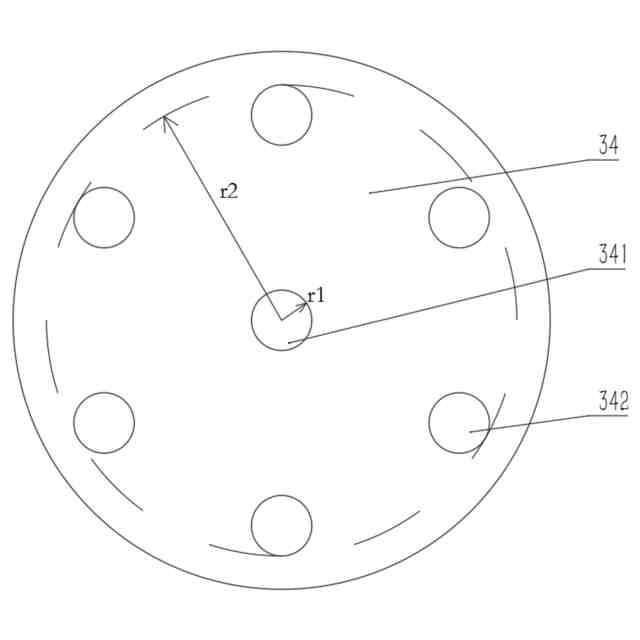
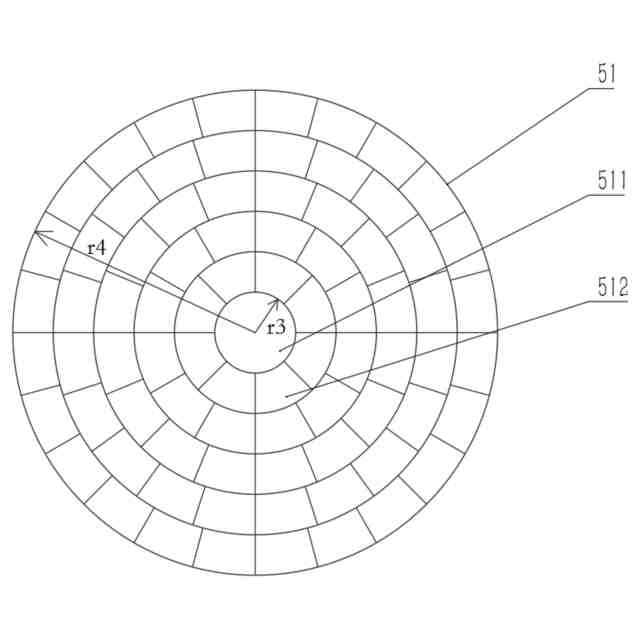
切羽面液圧支保架台位置精度チェック方法であって、ここで、端部の液圧支保を全体基準とし、先行の隣接する液圧支保に対して後続液圧支保を対象支保とし、後続の隣接する液圧支保に対して先行液圧支保を基準支保とし、架台(11)には、レーザ照射装置とレーザ受光装置とが設けられており、前記レーザ照射装置は、対象支保に向かって設けられたレーザ照射器(34)を含み、前記レーザ照射器(34)の円心位置において中心強光源(341)が設けられ、中心強光源(341)の外側において環状弱光源(342)が周方向に沿って均等に配置され、前記中心強光源(341)の半径がr1とし、環状弱光源(342)のエッジ包絡線の包絡半径がr2とし、レーザ受光装置は、基準支保に向かって設けられた第1レーザ受光器(51)を含み、前記第1レーザ受光器(51)の円心位置において中心受光領域(511)が設けられ、第1レーザ受光器(51)の残りの領域においてレーザ受光モジュール(512)が埋められ、前記中心受光領域(511)の半径がr3とし、第1レーザ受光器(51)の半径がr4とし、中心強光源(341)のレーザを受光する際に、照射された中心受光領域(511)及び/又はレーザ受光モジュール(512)はハイレベル信号を発生し、環状弱光源(342)のレーザを受光する際に、照射された中心受光領域(511)及び/又はレーザ受光モジュール(512)はローレベル信号を発生し、レーザが照射されていない際に、中心受光領域(511)及びレーザ受光モジュール(512)はレベル信号を発生しない、切羽面液圧支保架台位置精度チェック方法。
続きを表示(約 2,100 文字)
【請求項2】
S1.対象支保の位置検出誤差Δ、L1水準閾値δ1(δ1=r1+r3)、L2水準閾値δ2(δ2=r1+r4)、L3水準閾値δ3(δ3=r2+r4)と定義する。
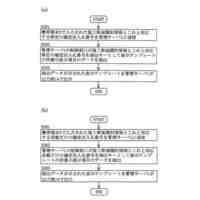
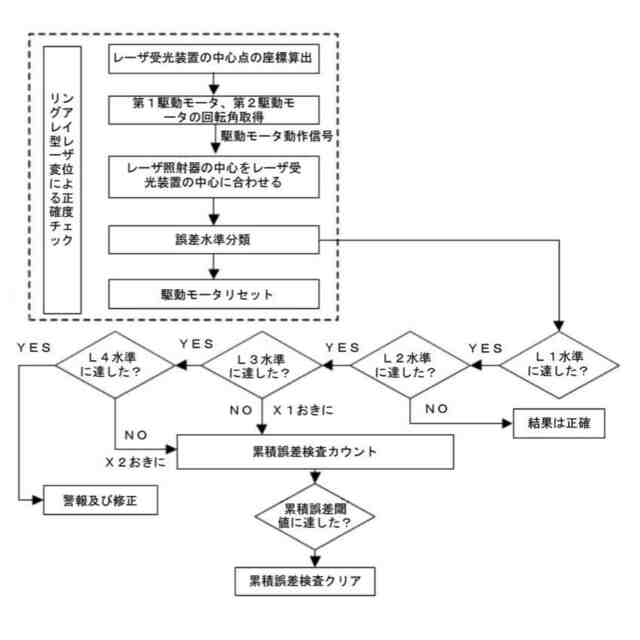
S2.対象支保のポーズ検出精度に対し、誤差水準を分類する、
(1)連続的な複数の対象支保の間で、Δ≦δ1の場合に、検出結果がL1水準であると判定し、
(2)対象支保がδ1<Δ≦δ2の場合に、検出結果がL2水準であると判定し、
(3)対象支保がδ2<Δ≦δ3の場合に、検出結果がL3水準であると判定し、
(4)対象支保がΔ>δ3の場合に、検出結果がL4水準であると判定する、ステップS2と、を含む、請求項1に記載の切羽面液圧支保架台位置精度チェック方法。
【請求項3】
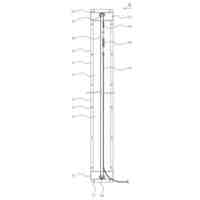
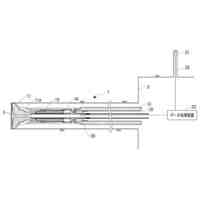
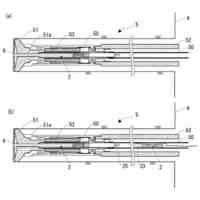
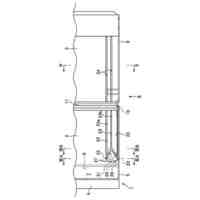
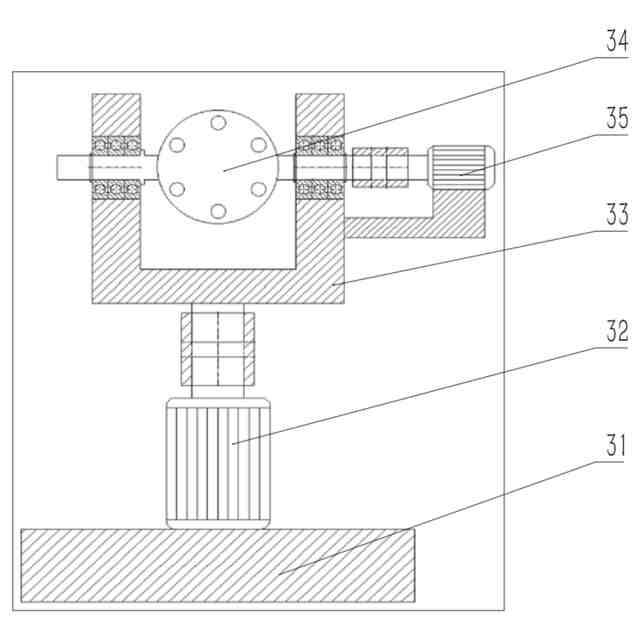
前記レーザ照射装置は、支持ベース(31)と、第1モータ(32)と、支持台(33)と、レーザ照射器(34)と、第2モータ(35)と、をさらに含み、前記支持ベース(31)が架台(11)に固定して連結され、第1モータ(32)が垂直方向に沿って支持ベース(31)に設けられ、支持台(33)が第1モータ(32)の上方に連結されると共に、第1モータ(32)の駆動によって水平方向に回動可能であり、レーザ照射器(34)が支持台(33)に回動可能に設けられると共に、第2モータ(35)が水平方向に沿って支持台(33)に取り付けられ、第2モータ(35)がレーザ照射器(34)を回動駆動し、架台(11)には、第2レーザ受光器(43)を含む累積誤差検査装置がさらに設けられている、第1レーザ受光器(51)と同じ構成を有する、請求項2に記載の切羽面液圧支保架台位置精度チェック方法。
【請求項4】
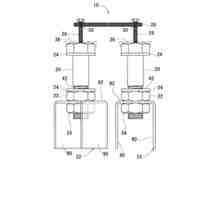
架台(11)には、第3モータ(41)と、伸長軸(42)と、第2レーザ受光器(43)とを含む累積誤差検査装置をさらに設けられており、前記第3モータ(41)が水平方向に沿って架台(11)に設けられると共に、伸長軸(42)を回動駆動し、第2レーザ受光器(43)が伸長軸(42)に固定して連結され、前記第2レーザ受光器(43)が、請求項3に記載の切羽面液圧支保架台位置精度チェック方法。
【請求項5】
誤差水準分類を行った後、累積誤差検査を行い、ここで、累積誤差検査を行うことは、
第2レーザ受光器(43)の中心座標をD
1j
(D
1jx
, D
1jy
, D
1jz
)と定義する場合、式(1)によって得られた2つの結果のうち、対象支保架台(11)から明らかに外れた座標を排除することで、第2レーザ受光器(43)の中心座標D
1j
(D
1jx
, D
1jy
, D
1jz
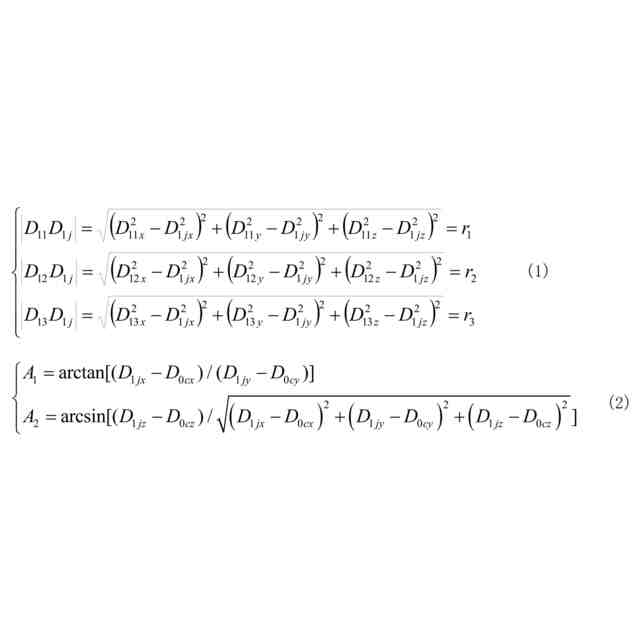
)を得、レーザ照射器(34)の基準支保座標系での座標をD
0c
(D
0cx
, D
0cy
, D
0cz
)と定義し、第2レーザ受光器(43)の中心強光源を中心受光領域(511)に合わせる際に、第1モータ(32)及び第2モータ(35)の回転の角度がそれぞれA
1
及びA
2
となる必要があり、A
1
及びA
2
は式(2)に示すようになるステップS3を含む、請求項3に記載の切羽面液圧支保架台位置精度チェック方法。
JPEG
2024043568000006.jpg
63
170
【請求項6】
最大許容誤差をΔ1と定義し、Δ1値を予め設定しておき、
(1)L1水準誤差結果については、検出結果が十分に正確であり、誤差検査を行う必要がないと判定し、
(2)L2水準誤差結果に対しては、検出結果が比較的に正確であり、X1台の液圧支保おきに累積誤差検査を行い、X1=[Δ1/δ2]となると判定し、
(3)L3水準誤差結果については、検出結果が比較的粗く、X2台の液圧支保おきに累積誤差検査を行い、X2=[Δ1/δ3]となると判定し、
(4)L4水準誤差結果については、検出が故障したと判定し、プロセッサは、操作者が手動で修復するように指導するために故障信号を送信する、請求項5に記載の切羽面液圧支保架台位置精度チェック方法。
【請求項7】
L2水準誤差結果については、後続の液圧支保に対するチェック結果にL3水準結果及びL4水準結果が存在しない場合に、後続の結果をL2水準に合わせて処理し、L3水準誤差結果については、先行支保にL2水準結果、請求項6に記載の切羽面液圧支保架台位置精度チェック方法。
【請求項8】
がすでに存在する場合に、先行のL2水準結果をL3水準に一括して処理する、請求項6に記載の切羽面液圧支保位置精度チェック方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は液圧支保位置姿勢検出分野に関し、特に切羽面液圧支保位置精度チェック方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
現在、液圧支保の天板、底板の姿勢検出にはすでに多くの監視方法が知られており、多くの場合、傾斜角センサやストラップダウン慣性航法などの方式が使用されているが、傾斜角センサを用いて天板、底板で液圧支保の姿勢や角度を検出する場合に、その傾斜角誤差が累積して増大し、さらに、傾斜角センサによる液圧支保の姿勢検出には、角度の急激な変化に対してひずみが生じ、かつ、精度が一般的に高くないなど、いくつかの課題が存在している。従来の液圧支保に対する位置姿勢調整を行った後、その位置姿勢を確認するための精度チェック方法が不足しており、作業信頼性に悪影響を与える。
【発明の概要】
【発明が解決しようとする課題】
【0003】
本発明は、上記の問題を解決し、切羽面液圧支保架台位置精度チェック方法を提供することを目的とし、採用される技術的方案は以下のとおりである。
【課題を解決するための手段】
【0004】
切羽面液圧支保架台位置精度チェック方法であって、ここで、端部の液圧支保を全体基準とし、先行の隣接する液圧支保に対して後続液圧支保を対象支保とし、後続の隣接する液圧支保に対して先行液圧支保を基準支保としと、架台には、レーザ照射装置とレーザ受光装置とが設けられており、前記レーザ照射装置は、対象支保に向かって設けられたレーザ照射器を含み、前記レーザ照射器の円心位置において中心強光源が設けられ、中心強光源の外側において環状弱光源が周方向に沿って均等に配置され、前記中心強光源の半径がr1とし、環状弱光源のエッジ包絡線の包絡半径がr2とし、レーザ受光装置は、基準支保に向かって設けられた第1レーザ受光器を含み、前記第1レーザ受光器の円心位置において中心受光領域が設けられ、第1レーザ受光器の残りの領域においてレーザ受光モジュールが埋められ、前記中心受光領域の半径がr3とし、第1レーザ受光器の半径がr4とし、中心強光源のレーザを受光する際に、照射された中心受光領域及び/又はレーザ受光モジュールはハイレベル信号を発生し、環状弱光源のレーザを受光する際に、照射された中心受光領域及び/又はレーザ受光モジュールはローレベル信号を発生し、レーザが照射されていない際に、中心受光領域及びレーザ受光モジュールはレベル信号を発生しない。
【0005】
上記の方案に基づいて、切羽面液圧支保架台位置精度チェック方法は、
S1.対象支保の位置検出誤差Δ、L1水準閾値δ1(δ1=r1+r3)、L2水準閾値δ2(δ2=r1+r4)、L3水準閾値δ3(δ3=r2+r4)を定義する。
【0006】
S2.対象支保のポーズ精度に対し、誤差水準を分類する、
(1)連続的な複数の対象支保の間で、Δ≦δ1の場合に、検出結果がL1水準であると判定し、
(2)対象支保がδ1<Δ≦δ2の場合に、検出結果がL2水準であると判定し、
【0007】
(3)対象支保がδ2<Δ≦δ3の場合に、検出結果がL3水準であると判定し、
(4)対象支保がΔ>δ3の場合に、検出結果がL4水準であると判定する、ステップS2と、を含む。
【0008】
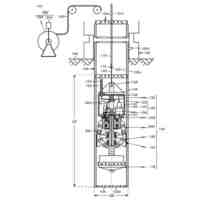
上記の方案に基づいて、前記レーザ照射装置は、支持ベースと、第1モータと、支持台と、レーザ照射器と、第2モータと、をさらに含み、前記支持ベースが架台に固定して連結され、第1モータが垂直方向に沿って支持ベースに設けられ、支持台が第1モータの上方に連結されると共に、第1モータの駆動によって水平方向に回動可能であり、レーザ照射器が支持台に回動可能に設けられると共に、第2モータが水平方向に沿って支持台に取り付けられ、第2モータがレーザ照射器を回動駆動し、架台には、第3モータと、伸長軸と、第2レーザ受光器と、を含む累積誤差検査装置がさらに設けられており、前記第3モータが水平方向に沿って架台に設けられると共に、伸長軸を回動駆動し、第2レーザ受光器が伸長軸に固定して連結され、前記第2レーザ受光器が、第1レーザ受光器と同じ構成を有する。
【0009】
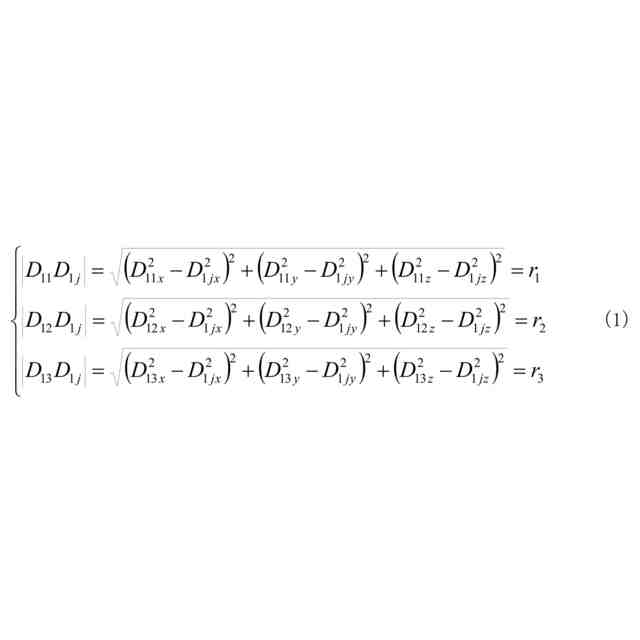
上記の方案に基づいて、誤差水準分類を行った後、累積誤差検査を行い、ここで、累積誤差検査を行うことは、
第2レーザ受光器の中心座標をD
1j
(D
1jx
, D
1jy
, D
1jz
)と定義する場合、
【0010】
JPEG
2024043568000002.jpg
42
170
式(1)によって得られた2つの結果のうち、対象支保架台から明らかに外れた座標を排除することで、第2レーザ受光器の中心座標D
1j
(D
1jx
, D
1jy
, D
1jz
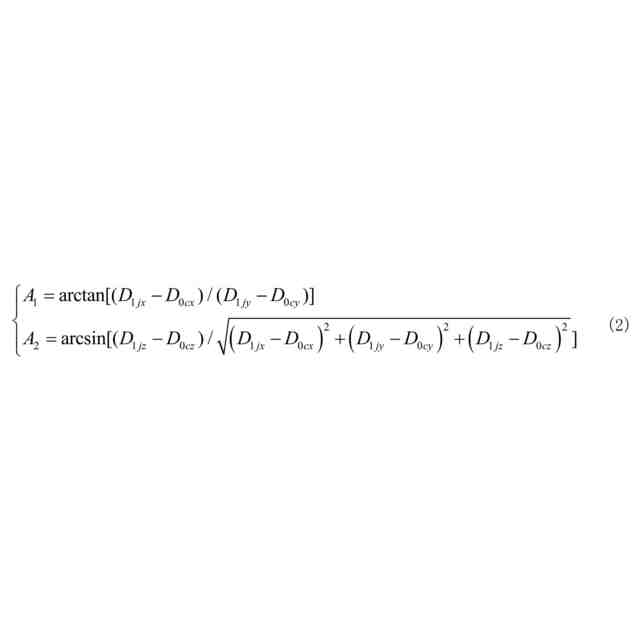
)を得、レーザ照射器の基準支保座標系での座標をD
0c
(D
0cx
, D
0cy
, D
0cz
)と定義し、中心強光源を第2レーザ受光器の中心受光領域に合わせる際に、第1モータ及び第2モータの回転の角度がそれぞれA
1
及びA
2
となる必要があり、A
1
及びA
2
は式(7)に示すようになるステップS3を含む。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
山東科技大学
切羽面液圧支保架台群状態検知記述方法
11か月前
山東科技大学
切羽面液圧支保架台位置精度チェック方法
11か月前
山東科技大学
非等方性を考慮した水平方向対流圏遅延分類方法
2か月前
山東科技大学
食品保存取出システム、方法及びスマート冷蔵庫
4か月前
山東科技大学
レーザードップラー振動測定に基づく外壁断熱層の空洞検出方法及び装置
3か月前
山東科技大学
数値制御工作機械の隣接する切削活動間の無負荷過程における主軸減速による省エネルギー方法
11か月前
山東科技大学
ショートウォール連続採掘連続充填における材料の流動パターンをシミュレーションする実験装置及び方法
6か月前
個人
高速道路トンネルの強靭化法
3か月前
株式会社エステック
掘削機及び掘削装置
2か月前
日本車輌製造株式会社
油圧ユニット
2か月前
株式会社奥村組
電力線通信設備を用いた推進方法
17日前
西松建設株式会社
土層分布検知方法
2か月前
鹿島建設株式会社
掘削方法
25日前
株式会社ケー・エフ・シー
注入材施工管理システム
3か月前
ニシオティーアンドエム株式会社
トンネル工事用作業装置
1か月前
システム計測株式会社
ケリーバ保持治具
2か月前
鹿島建設株式会社
トンネル掘削機
2か月前
個人
発電用掘削方法および発電用掘削装置
3か月前
鹿島建設株式会社
線状体敷設方法
25日前
大成建設株式会社
シールドトンネルとその施工方法
1か月前
株式会社Lavie
土木作業装置
1か月前
株式会社ケー・エフ・シー
補強注入構造及び地山補強工法
2か月前
個人
オープンシールド工法用コンクリート函体
2か月前
三重重工業株式会社
耐寒用導水樋
25日前
個人
オープンシールド工法用コンクリート函体
2か月前
大成建設株式会社
拡翼掘削機
3か月前
大成建設株式会社
切拡げ掘削面の支保構造の設計方法
3か月前
大成建設株式会社
支持ユニット
2か月前
株式会社安藤・間
移動式架台
1か月前
清水建設株式会社
泥土評価システム、泥土評価方法
1か月前
株式会社大林組
切羽前方探査方法
1か月前
株式会社大林組
岩石コア採取システム
1か月前
日本コンクリート工業株式会社
掘削装置
今日
清水建設株式会社
制御装置、制御方法、およびプログラム
2か月前
大成建設株式会社
中折れシールド掘削機
2か月前
佐藤工業株式会社
山岳トンネルの切羽監視方法及び監視システム
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ