TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024041026
公報種別
公開特許公報(A)
公開日
2024-03-26
出願番号
2023062009
出願日
2023-04-06
発明の名称
切羽面液圧支保架台群状態検知記述方法
出願人
山東科技大学
代理人
個人
主分類
G01C
15/00 20060101AFI20240318BHJP(測定;試験)
要約
【課題】液圧支保に対する位置記述の正確性を高め、切羽面液圧支保群の位置の直線度を確保できる切羽面液圧支保架台群状態検知記述方法を提供する。
【解決手段】切羽面液圧支保架台群状態検知記述方法は、端部の液圧支保を全体基準とし、先行の隣接する液圧支保に対して後続液圧支保を対象支保とするステップと、液圧支保架台における、先行の隣接する液圧支保のカメラを向く側において、D1とD2とD3との3つの監視点を設置し、前記D1とD2とD3とは共線ではなく、二等辺三角形を形成することができず、D1とD2とを結ぶ線が架台のエッジラインに平行であるステップと、カメラによって後続の隣接する液圧支保の監視点を撮像し、撮像した画像をプロセッサに伝送するステップと、プロセッサによって各監視点の座標を解析し、対象液圧支保架台空間状態を得るステップと、を含む。
【選択図】図19
特許請求の範囲
【請求項1】
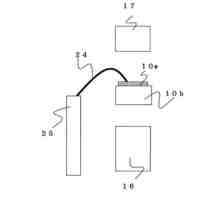
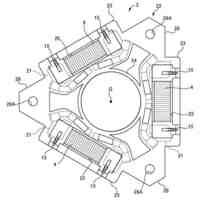
切羽面液圧支保架台群状態検知記述方法であって、ここで、液圧支保架台(11)に撮像装置が設けられており、前記撮像装置は隣接する液圧支保に向くカメラ(24)を含み、
前記切羽面液圧支保架台群状態検知記述方法は、
端部の液圧支保を全体基準とし、先行の隣接する液圧支保に対して後続液圧支保を対象支保とし、後続の隣接する液圧支保に対して先行液圧支保を基準支保とし、X方向を基準支保の幅方向と、Y方向を基準支保の長さ方向と、Z方向を基準支保の作業高さ方向とそれぞれ定義するステップS1と、
液圧支保架台(11)における、先行の隣接する液圧支保のカメラ(24)を向く側において、D1とD2とD3との3つの監視点を設置するステップであって、前記D1とD2とD3とは共線ではなく、二等辺三角形を形成することができず、D1とD2とを結ぶ線が架台(11)のエッジラインに平行であるステップS2と、
カメラ(24)によって後続の隣接する液圧支保の監視点を撮像し、撮像した画像をプロセッサに伝送するステップS3と、
プロセッサによって各監視点の座標を解析し、対象液圧支保架台空間状態を得るステップS4と、を含む、切羽面液圧支保架台群状態検知記述方法。
続きを表示(約 3,800 文字)
【請求項2】
前記ステップS4において各監視点を解析することは、
D
01
(D
01x
, D
01y
, D
01z
)、D
02
(D
02x
, D
02y
, D
02z
)、D
03
(D
03x
, D
03y
, D
03z
)が、基準支保におけるD1とD2とD3との3つの点の基準支保座標系X
0
での座標であり、D
11
(D
11x
, D
11y
, D
11z
)、D
12
(D
12x
, D
12y
, D
12z
)、D
13
(D
13x
, D
13y
, D
13z
)が、対象支保におけるD1とD2とD3との3つの点のX
0
での座標であると想定して、ベクトルD
01
D
02
、D
02
D
03
の基準支保座標系X
0
での法線ベクトルn
0
を構築する場合、n
0=
D
01
D
02
×D
02
D
03
となり、ベクトルD
11
D
12
、D
12
D
13
の基準支保座標系X
0
での法線ベクトルn
1
を構築する場合、n
1=
D
11
D
12
×D
12
D
13
となるステップS4-1と、
【請求項3】
端部の液圧支保を記述基準とし、端部の液圧支保架台(11)の重心D
g1
を中心とし、切羽面要件Ly及びLzを辺長とし、YOZ平面において記述平面を作成し、後続の各対象支保の座標を式(5)に従って記述平面にマッピングさせ、液圧支保架台空間の記述空間を形成し、各液圧支保のY方向及びZ方向の整列度合を観察するステップS5をさらに含む、請求項2に記載の切羽面液圧支保架台群状態検知記述方法。
【請求項4】
カメラ(24)のY方向における撮像範囲は、対象支保推移ステップLpをカバーすると共に、Y方向における動き閾値±Δyを含み、カメラ(24)のX方向における撮像範囲は、X方向における動き閾値-Δx1と+Δx2とを含み、カメラ(24)のZ方向における撮像範囲は、Z方向における動き閾値±Δzを含む、請求項1に記載の切羽面液圧支保架台群状態検知記述方法。
【請求項5】
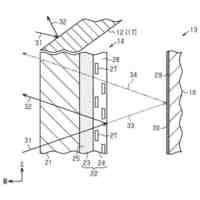
カメラ(24)の裏面にマークポイント(25)が設けられており、基準支保のカメラ(24)によって対象支保におけるマークポイント(25)を撮像した後、マークポイント(25)の座標を解析したうえ、監視点の座標を解析する、請求項1に記載の切羽面液圧支保架台群状態検知記述方法。
【請求項6】
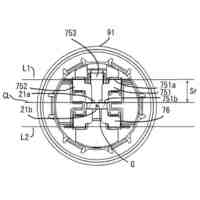
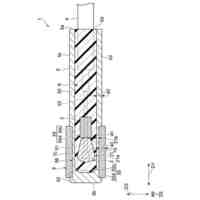
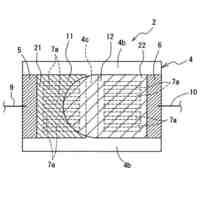
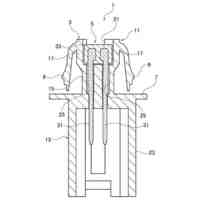
架台(11)には、レーザ照射装置とレーザ受光装置とが設けられており、前記レーザ照射装置は、対象支保に向かって設けられたレーザ照射器(34)を含み、前記レーザ照射器(34)の円心位置において中心強光源(341)が設けられ、中心強光源(341)の外側において環状弱光源(342)が周方向に沿って均等に配置され、前記中心強光源(341)の半径がr1とし、環状弱光源(342)のエッジ包絡線の包絡半径がr2とし、レーザ受光装置は、基準支保に向かって設けられた第1レーザ受光器(51)を含み、前記第1レーザ受光器(51)の円心位置において中心受光領域(511)が設けられ、第1レーザ受光器(51)の残りの領域においてレーザ受光モジュール(512)が埋められ、前記中心受光領域(511)の半径がr3とし、第1レーザ受光器(51)の半径がr4とし、中心強光源(341)のレーザを受光する際に、照射された中心受光領域(511)及び/又はレーザ受光モジュール(512)はハイレベル信号を発生し、環状弱光源(342)のレーザを受光する際に、照射された中心受光領域(511)及び/又はレーザ受光モジュール(512)はローレベル信号を発生し、レーザが照射されていない際に、中心受光領域(511)及びレーザ受光モジュール(512)はレベル信号を発生しない、請求項1に記載の切羽面液圧支保架台群状態検知記述方法。
【請求項7】
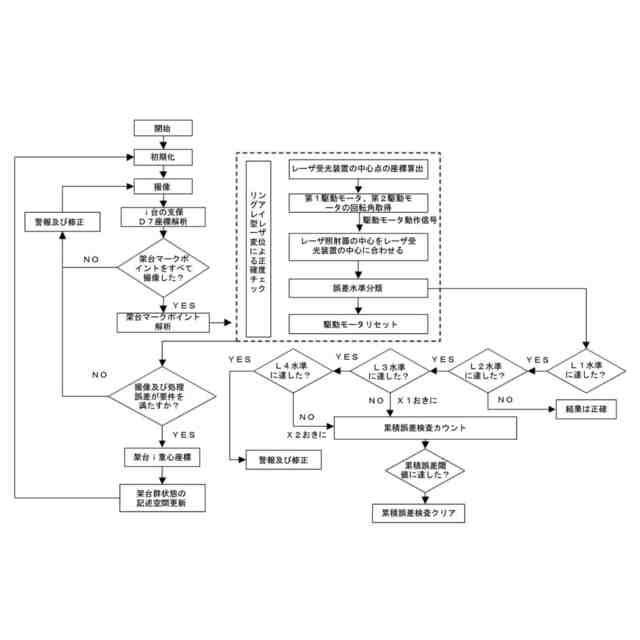
対象支保空間状態を得た後、対象支保姿勢検出精度に対して誤差水準分類を行い、ここで、誤差水準分類を行うことは、
対象支保に対する位置検出誤差Δと、L1水準閾値δ1(δ1=r1+r3)と、L2水準閾値δ2(δ2=r1+r4)と、L3水準閾値δ3(δ3=r2+r4)とをそれぞれ定義するステップS6-1と、
(1)連続的な複数の対象支保の間で、Δ≦δ1の場合に、検出結果がL1水準であると判定し、
(2)対象支保がδ1<Δ≦δ2の場合に、検出結果がL2水準であると判定し、
(3)対象支保がδ2<Δ≦δ3の場合に、検出結果がL3水準であると判定し、
(4)対象支保がΔ>δ3の場合に、検出結果がL4水準であると判定する、ステップS6-2と、を含む、請求項6に記載の切羽面液圧支保架台群状態検知記述方法。
【請求項8】
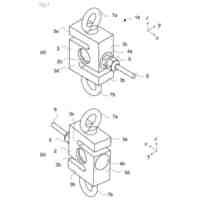
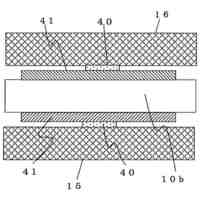
前記レーザ照射装置は、支持ベース(31)と、第1モータ(32)と、支持台(33)と、レーザ照射器(34)と、第2モータ(35)と、をさらに含み、前記支持ベース(31)が架台(11)に固定して連結され、第1モータ(32)が垂直方向に沿って支持ベース(31)に設けられ、支持台(33)が第1モータ(32)の上方に連結されると共に、第1モータ(32)の駆動によって水平方向に回動可能であり、レーザ照射器(34)が支持台(33)に回動可能に設けられると共に、第2モータ(35)が水平方向に沿って支持台(33)に取り付けられ、第2モータ(35)がレーザ照射器(34)を回動駆動し、
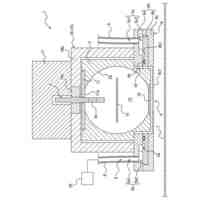
架台(11)には、第3モータ(41)と、伸長軸(42)と、第2レーザ受光器(43)とを含む累積誤差検査装置をさらに設けられており、前記第3モータ(41)が水平方向に沿って架台(11)に設けられると共に、伸長軸(42)を回動駆動し、第2レーザ受光器(43)が伸長軸(42)に固定して連結され、前記第2レーザ受光器(43)が、第1レーザ受光器(51)と同じ構成を有する、請求項7に記載の切羽面液圧支保架台群状態検知記述方法。
【請求項9】
誤差水準分類を行った後、累積誤差検査を行い、ここで、累積誤差検査を行うことは、
第2レーザ受光器(43)の中心座標をD
1j
(D
1jx
, D
1jy
, D
1jz
)と定義する場合、式(6)によって得られた2つの結果のうち、対象支保架台(11)から明らかに外れた座標を排除することで、第2レーザ受光器(43)の中心座標D
1j
(D
1jx
, D
1jy
, D
1jz
)を得、レーザ照射器(34)の基準支保座標系での座標をD
0c
(D
0cx
, D
0cy
, D
0cz
)と定義し、第2レーザ受光器(43)の中心強光源を中心受光領域(511)に合わせる際に、第1モータ(32)及び第2モータ(35)の回転の角度がそれぞれA
1
及びA
2
となる必要があり、A
1
及びA
2
は式(7)に示すようになるステップS7を含む、請求項8に記載の切羽面液圧支保架台群状態検知記述方法。
JPEG
2024041026000014.jpg
64
170
【請求項10】
最大許容誤差をΔ1と定義し、Δ1値を予め設定しておき、
(1)L1水準誤差結果については、検出結果が十分に正確であり、誤差検査を行う必要がないと判定し、
(2)L2水準誤差結果に対しては、検出結果が比較的に正確であり、X1台の液圧支保おきに累積誤差検査を行い、X1=[Δ1/δ2]となると判定し、
(3)L3水準誤差結果については、検出結果が比較的粗く、X2台の液圧支保おきに累積誤差検査を行い、X2=[Δ1/δ3]となると判定し、
(4)L4水準誤差結果については、検出が故障したと判定し、プロセッサは、操作者が手動で修復するように指導するために故障信号を送信する、請求項9に記載の切羽面液圧支保架台群状態検知記述方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は液圧支保位置姿勢検出分野に関し、特に切羽面液圧支保架台群状態検知記述方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
炭鉱総合採掘の自動化は無人化、省力化に進んでおり、より安全な採掘を実現するために、液圧支保の姿勢を監視し、軽微の場合は作業の進度に悪影響を与え作業効率を下げてしまい、深刻な場合は液圧支保が損壊し作業者の死傷を引き起こしてしまうなどの、液圧支保の誤動作による採掘への重大な安全上の事故や経済的損失を回避する必要がある。現在、液圧支保の天板、底板の姿勢検出にはすでに多くの監視方法が知られており、多くの場合、傾斜角センサやストラップダウン慣性航法などの方式が使用されているが、傾斜角センサを用いて天板、底板で液圧支保の姿勢や角度を検出する場合に、その傾斜角誤差が累積して増大し、さらに、傾斜角センサによる液圧支保の姿勢検出には、角度の急激な変化に対してひずみが生じ、かつ、精度が一般的に高くないなど、いくつかの課題が存在している。
【発明の概要】
【発明が解決しようとする課題】
【0003】
本発明は、上記の問題を解決し、切羽面液圧支保架台群状態検知記述方法を提供することを目的とし、採用される技術的方案は以下のとおりである。
【課題を解決するための手段】
【0004】
切羽面液圧支保架台群状態検知記述方法であって、ここで、液圧支保架台に撮像装置が設けられており、前記撮像装置は隣接する液圧支保に向くカメラを含み、
【0005】
切羽面液圧支保架台群状態検知記述方法は、
端部の液圧支保を全体基準とし、先行の隣接する液圧支保に対して後続液圧支保を対象支保とし、後続の隣接する液圧支保に対して先行液圧支保を基準支保とし、X方向を基準支保の幅方向と、Y方向を基準支保の長さ方向と、Z方向を基準支保の作業高さ方向とそれぞれ定義するステップS1と、
【0006】
液圧支保架台(11)における、先行の隣接する液圧支保のカメラを向く側において、D1とD2とD3との3つの監視点を設置するステップであって、前記D1とD2とD3とは共線ではなく、二等辺三角形を形成することができず、D1とD2とを結ぶ線が架台のエッジラインに平行であるステップS2と、
【0007】
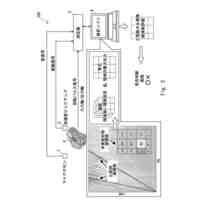
カメラによって後続の隣接する液圧支保の監視点を撮像し、撮像した画像をプロセッサに伝送するステップS3と、
【0008】
プロセッサによって各監視点の座標を解析し、対象液圧支保架台空間状態を得るステップS4と、を含む。
【0009】
上記の方案に基づいて、前記ステップS4において各監視点を解析することは、
D
01
(D
01x
, D
01y
, D
01z
)、D
02
(D
02x
, D
02y
, D
02z
)、D
03
(D
03x
, D
03y
, D
03z
)が、基準支保におけるD1とD2とD3との3つの点の基準支保座標系X
0
での座標であり、D
11
(D
11x
, D
11y
, D
11z
)、D
12
(D
12x
, D
12y
, D
12z
)、D
13
(D
13x
, D
13y
, D
13z
)が、対象支保におけるD1とD2とD3との3つの点のX
0
での座標であると想定して、ベクトルD
01
D
02
、D
02
D
03
の基準支保座標系X
0
での法線ベクトルn
0
を構築する場合、n
0=
D
01
D
02
×D
02
D
03
となり、ベクトルD
11
D
12
、D
12
D
13
の基準支保座標系X
0
での法線ベクトルn
1
を構築する場合、n
1=
D
11
D
12
×D
12
D
13
となるステップS4-1と、
【0010】
D
01
を通りn
0
をベクトル方向としてD4の点を構築する場合、基準支保座標系X
0
でのベクトルはD
04
=n
0
+D
01
となり、D
11
を通りn
1
をベクトル方向としてD4’の点を構築する場合、基準支保座標系X
0
でのベクトルはD
14
=n
1
+D
11
となるステップS4-2と、
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
甲神電機株式会社
漏電検出器
1か月前
株式会社大真空
センサ
26日前
甲神電機株式会社
電流検出器
1か月前
株式会社大真空
センサ
3日前
甲神電機株式会社
電流センサ
1か月前
東レ株式会社
液体展開用シート
18日前
ユニパルス株式会社
ロードセル
25日前
株式会社高橋型精
採尿具
1か月前
株式会社トプコン
測量装置
1か月前
株式会社トプコン
植物センサ
14日前
アズビル株式会社
湿度センサ
11日前
アズビル株式会社
熱式流量計
1か月前
キヤノン電子株式会社
サーボ加速度計
18日前
キヤノン電子株式会社
サーボ加速度計
18日前
キヤノン電子株式会社
サーボ加速度計
18日前
株式会社ミツトヨ
変位測定装置
10日前
株式会社クボタ
作業車両
17日前
株式会社小野測器
回転計測装置
10日前
株式会社東芝
センサ
10日前
豊田合成株式会社
表示装置
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
アズビル株式会社
検査用プローブ
4日前
シャープ株式会社
収納装置
1か月前
トヨタ自動車株式会社
異音解析方法
10日前
トヨタ自動車株式会社
画像検査装置
26日前
株式会社東京久栄
水中移動体用採水器
1か月前
トヨタ自動車株式会社
NVH解析装置
10日前
TDK株式会社
温度センサ
1か月前
横河電機株式会社
光源装置
1か月前
株式会社大真空
センサ及びその製造方法
25日前
日鉄テクノロジー株式会社
衝突試験装置
今日
キヤノン株式会社
撮像装置
10日前
ローム株式会社
MEMSデバイス
1か月前
公立大学法人大阪
蛍光X線分析装置
26日前
矢崎総業株式会社
サーミスタ
18日前
ヒロセ電機株式会社
磁気センサ装置
3日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ