TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024037367
公報種別
公開特許公報(A)
公開日
2024-03-19
出願番号
2022142172
出願日
2022-09-07
発明の名称
走行制御装置
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/22 20060101AFI20240312BHJP(水工;基礎;土砂の移送)
要約
【課題】走行モータの加速度の制限を、左右の走行操作部の操作内容の差異に応じた適切な制限にする。
【解決手段】走行装置11bは、左走行装置11bLおよび右走行装置11bRを備える。左走行操作部31Lは、左走行装置11bLを操作する。右走行操作部31Rは、右走行装置11bRを操作する。走行モータ26は、走行装置11bを駆動する。コントローラ40は、左走行操作部31Lおよび右走行操作部31Rの操作内容に応じて走行モータ26を制御する。コントローラ40は、左走行操作部31Lの操作内容と右走行操作部31Rの操作内容との差異の判定を行い、走行モータ26の加速度の制限を上記の差異に応じて変える。
【選択図】図7
特許請求の範囲
【請求項1】
左走行装置および右走行装置を有する走行装置と、
前記左走行装置を操作するための左走行操作部と、
前記右走行装置を操作するための右走行操作部と、
前記走行装置を駆動する走行モータと、
前記左走行操作部および前記右走行操作部の操作内容に応じて前記走行モータを制御するコントローラと、
を備え、
前記コントローラは、前記左走行操作部の操作内容と前記右走行操作部の操作内容との差異に関する判定を行い、前記走行モータの加速度の制限を前記差異に応じて変える、
走行制御装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の走行制御装置であって、
前記左走行操作部と前記右走行操作部とが互いに同じ操作方向に操作され、かつ、前記左走行操作部の操作量と前記右走行操作部の操作量との差分である左右操作量差分が所定差分値未満である操作を、走行直進操作とし、
前記左走行操作部と前記右走行操作部との少なくとも一方が操作される操作であって前記走行直進操作でない操作を、ステアリング操作としたとき、
前記コントローラは、前記走行直進操作が行われるときの前記走行モータの加速度の制限よりも、前記ステアリング操作が行われるときの前記走行モータの加速度の制限を小さくする、
走行制御装置。
【請求項3】
請求項2に記載の走行制御装置であって、
前記ステアリング操作は、前記左走行操作部と前記右走行操作部とが互いに同じ操作方向に操作され、かつ、前記左右操作量差分が前記所定差分値以上である走行ステアリング操作を含み、
前記走行ステアリング操作が行われるとき、前記コントローラは、前記左右操作量差分が第1差分のときよりも、前記左右操作量差分が前記第1差分よりも大きい第2差分のときに、前記走行モータの加速度の制限を小さくする、
走行制御装置。
【請求項4】
請求項3に記載の走行制御装置であって、
前記走行ステアリング操作が行われるとき、前記コントローラは、前記左右操作量差分が大きくなるにしたがって、前記走行モータの加速度の制限を小さくする、
走行制御装置。
【請求項5】
請求項1~4のいずれか1項に記載の走行制御装置であって、
動力源に回転駆動されることで前記走行モータに油を供給するポンプを備え、
前記走行モータは、前記ポンプから油を供給されることで回転駆動し、
前記コントローラは、前記左走行操作部および前記右走行操作部の操作内容に応じて前記ポンプの吐出流量を制御し、
前記コントローラは、単位時間当たりの前記ポンプの吐出流量の変化量であるポンプ吐出流量変化量の制限を前記差異に応じて変えることで、前記走行モータの加速度の制限を前記差異に応じて変える、
走行制御装置。
【請求項6】
請求項5に記載の走行制御装置であって、
前記ポンプの容量は、変更可能であり、
前記コントローラは、前記左走行操作部および前記右走行操作部の操作内容に応じて前記ポンプの容量を制御し、
前記コントローラは、前記ポンプの容量の単位時間当たりの変化量であるポンプ容量変化量の制限を変えることで、前記走行モータの加速度の制限を変える、
走行制御装置。
【請求項7】
請求項6に記載の走行制御装置であって、
前記コントローラは、前記ポンプの回転数に応じて、前記ポンプ容量変化量の制限の大きさを補正する、
走行制御装置。
【請求項8】
請求項7に記載の走行制御装置であって、
前記コントローラは、前記ポンプの回転数が第1回転数のときよりも、前記ポンプの回転数が前記第1回転数よりも大きい第2回転数のときに、前記ポンプ容量変化量の制限を大きくする、
走行制御装置。
【請求項9】
請求項8に記載の走行制御装置であって、
前記コントローラは、前記ポンプの回転数が大きくなるにしたがって、前記ポンプ容量変化量の制限を大きくする、
走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、左右の走行装置を制御する走行制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
例えば特許文献1に、従来の走行制御装置が記載されている。同文献に記載の発明では、走行操作部(同文献における走行操作レバー)が操作された場合に、操作に対する走行モータの応答性を、コントローラが一時的に遅らせる。これにより、走行操作部で誤操作が行われても、建設機械が微小距離しか移動しないようにすることが図られている(同文献の要約書および明細書の段落0013などを参照)。
【先行技術文献】
【特許文献】
【0003】
特開2000-319940号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
同文献に記載の発明は、左右の走行操作部(同文献では走行左操作レバー、走行右操作レバー)を備えている。走行モータの加速度を制限する(同文献では応答性を遅らせる)必要性は、左右の走行操作部の操作内容の差異によって変わる場合がある。しかし、同文献に記載の発明では、走行モータの加速度を制限する際に、左右の走行操作部の操作内容の差異は考慮されていない。そのため、走行モータの加速度の制限を、左右の走行操作部と右走行操作部との操作内容の差異に応じた制限にすることが望まれている。
【0005】
そこで、本発明は、走行モータの加速度の制限を、左右の走行操作部の操作内容の差異に応じた適切な制限にすることができる、走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
走行制御装置は、走行装置と、左走行操作部と、右走行操作部と、走行モータと、コントローラと、を備える。前記走行装置は、左走行装置および右走行装置を有する。前記左走行操作部は、前記左走行装置を操作するためのものである。前記右走行操作部は、前記右走行装置を操作するためのものである。前記走行モータは、前記走行装置を駆動する。前記コントローラは、前記左走行操作部および前記右走行操作部の操作内容に応じて前記走行モータを制御する。前記コントローラは、前記左走行操作部の操作内容と前記右走行操作部の操作内容との差異の判定を行い、前記走行モータの加速度の制限を前記差異に応じて変える。
【発明の効果】
【0007】
上記構成により、走行モータの加速度の制限を、左右の走行操作部の操作内容の差異に応じた適切な制限にすることができる。
【図面の簡単な説明】
【0008】
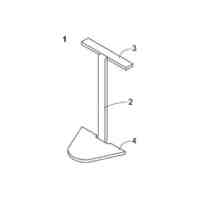
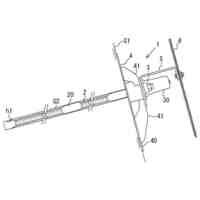
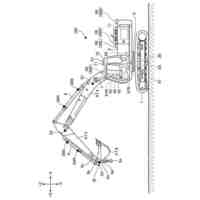
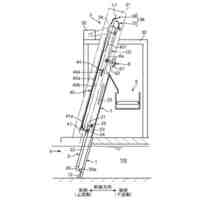
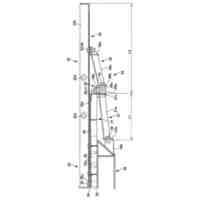
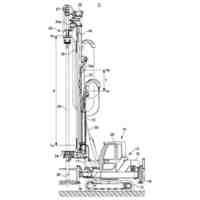
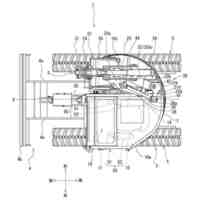
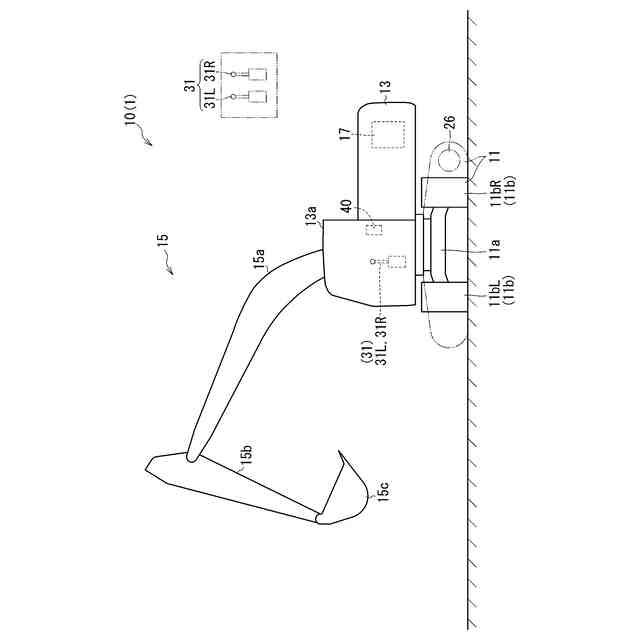
走行制御装置1の作業機械10を横から見た図である。
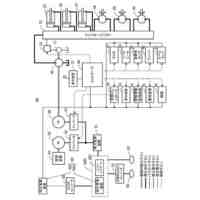
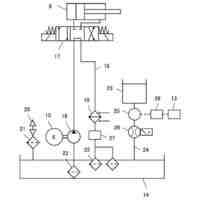
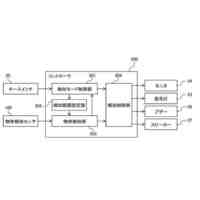
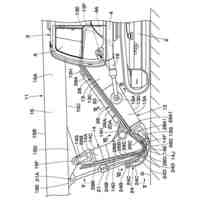
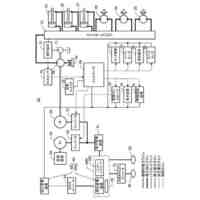
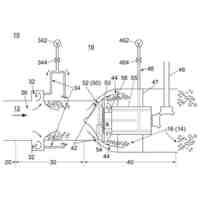
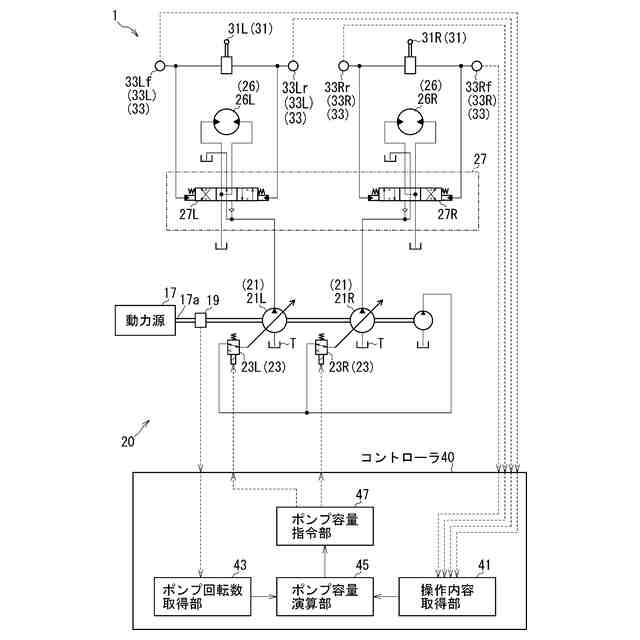
図1に示す走行制御装置1の油圧回路20などを示す図である。
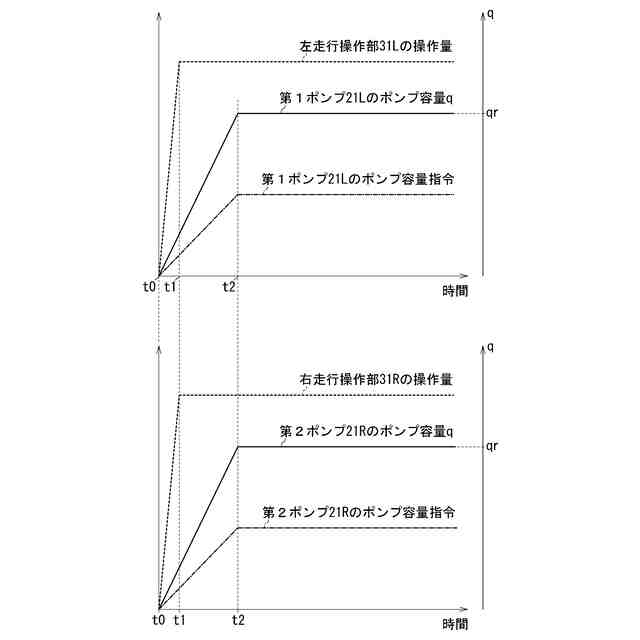
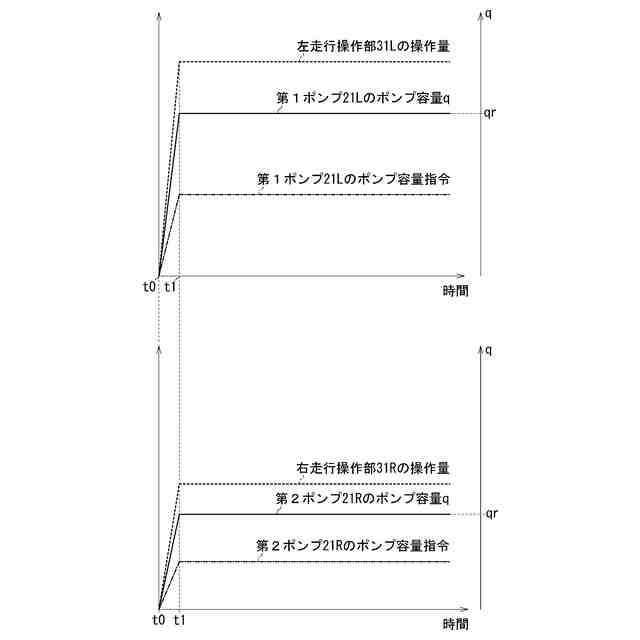
図2に示すポンプ21のポンプ容量変化量Δqが制限された場合の、ポンプ21の容量の時間的変化などを示すグラフである。
図2に示すポンプ21のポンプ容量変化量Δqが制限されない場合の、ポンプ21の容量の時間的変化などを示すグラフである。
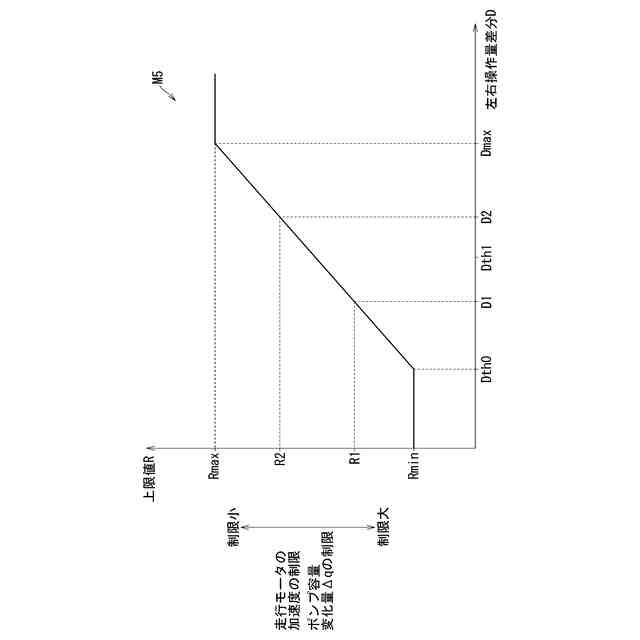
図2に示す走行操作部31の左右操作量差分Dと、ポンプ21のポンプ容量変化量Δqの上限値Rと、の関係を示すグラフである。
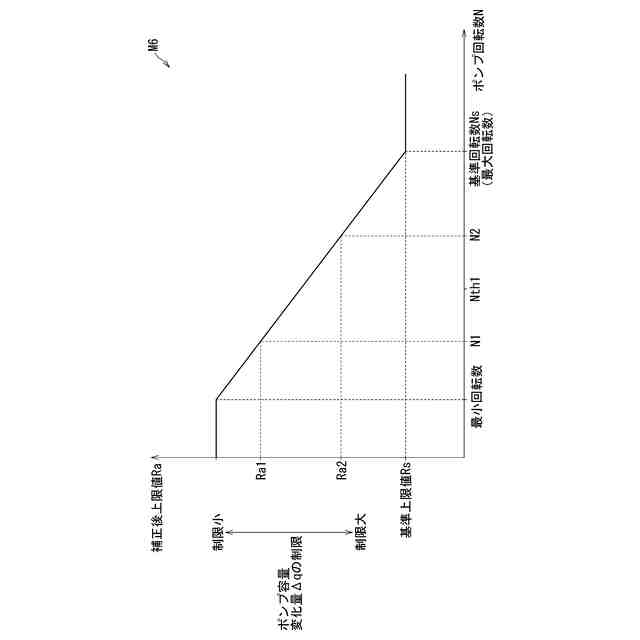
図2に示すポンプ21のポンプ回転数Nと、ポンプ21のポンプ容量変化量Δqの補正後上限値Raと、の関係を示すグラフである。
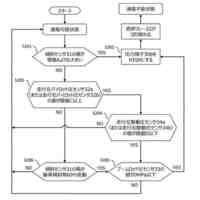
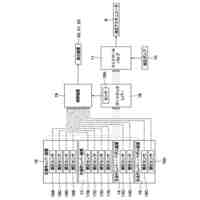
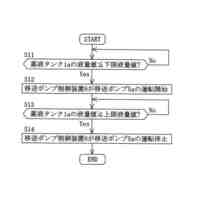
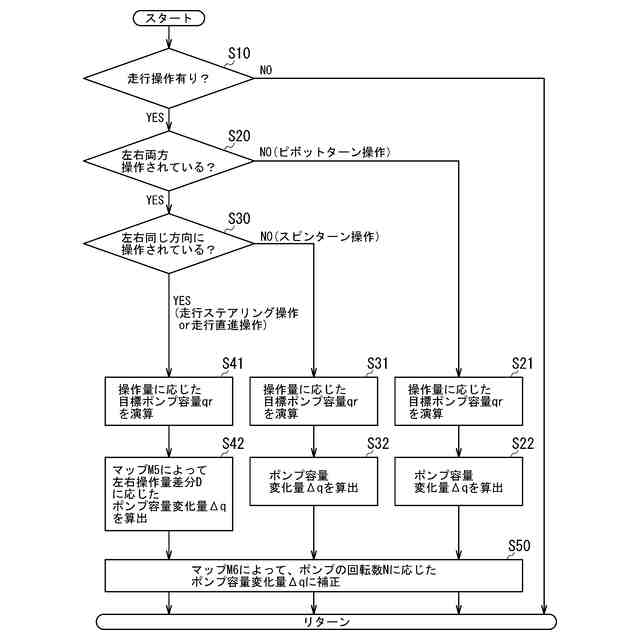
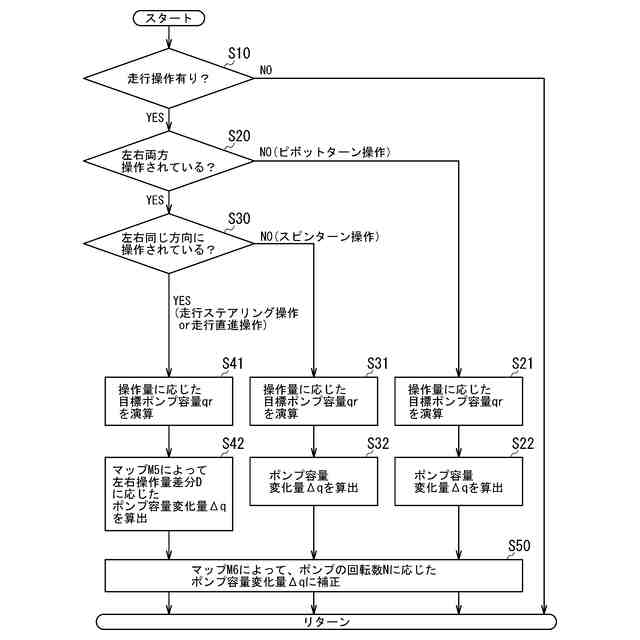
図2に示すコントローラ40の作動を示すフローチャートである。
【発明を実施するための形態】
【0009】
図1~図7を参照して、走行制御装置1について説明する。
【0010】
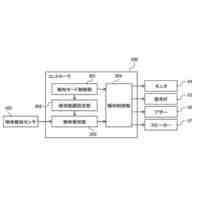
走行制御装置1は、図2に示す走行モータ26を制御し、走行装置11b(図1参照)を制御する装置(走行制御システム)である。走行制御装置1は、作業機械10(図1参照)と、走行操作部31と、操作量検出部33と、コントローラ40と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
杭頭接合部用部材
10日前
株式会社SKT
掘削ロッド
12日前
前澤工業株式会社
除塵機
11日前
住友建機株式会社
電動ショベル
2日前
日鉄建材株式会社
斜面安定化構造
3日前
個人
洪水防止堤防 又は 津波防止堤防
9日前
株式会社エスイー
対土石流構造物
9日前
住友建機株式会社
ショベル
9日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
建設機械
9日前
日立建機株式会社
作業機械
9日前
日立建機株式会社
作業機械
9日前
日立建機株式会社
作業機械
10日前
住友重機械工業株式会社
ショベル
2日前
株式会社丸順
土工機械のアタッチメント
16日前
日立建機株式会社
建設機械用部品
9日前
株式会社ジオック技研
既設杭の引き抜き方法
18日前
株式会社丸島アクアシステム
除塵装置
19日前
日立建機株式会社
電動式建設機械
18日前
日立建機株式会社
電動式建設機械
17日前
株式会社日立建機ティエラ
建設機械
16日前
株式会社日立建機ティエラ
建設機械
16日前
株式会社日立建機ティエラ
建設機械
16日前
日本車輌製造株式会社
チュービング装置
16日前
日立建機株式会社
作業機
17日前
日本車輌製造株式会社
杭打機の制御装置
12日前
日本車輌製造株式会社
杭打機の制御装置
12日前
住友建機株式会社
電動ショベル及びプログラム
2日前
日立建機株式会社
建設機械
16日前
株式会社タイセン工業
支柱支持構造及び支持部材
9日前
株式会社ケー・エフ・シー
注入薬液移送システム
2日前
株式会社小松製作所
作業機械
10日前
ヤンマーホールディングス株式会社
建設機械
18日前
日立建機株式会社
深礎掘削機
17日前
八千代エンジニヤリング株式会社
気泡発生システム
4日前
日立建機株式会社
作業機械
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ