TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024053335
公報種別
公開特許公報(A)
公開日
2024-04-15
出願番号
2022159534
出願日
2022-10-03
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
E02F
3/43 20060101AFI20240408BHJP(水工;基礎;土砂の移送)
要約
【課題】自動放土制御において作業効率の良い目標放土高さを適切に設定する作業機械を提供する。
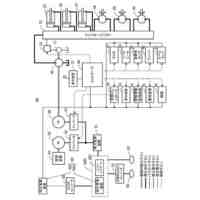
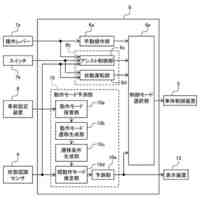
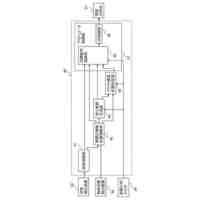
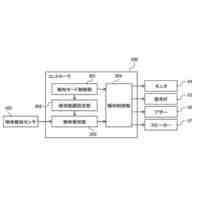
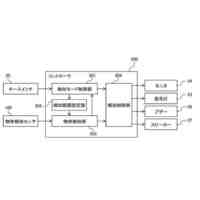
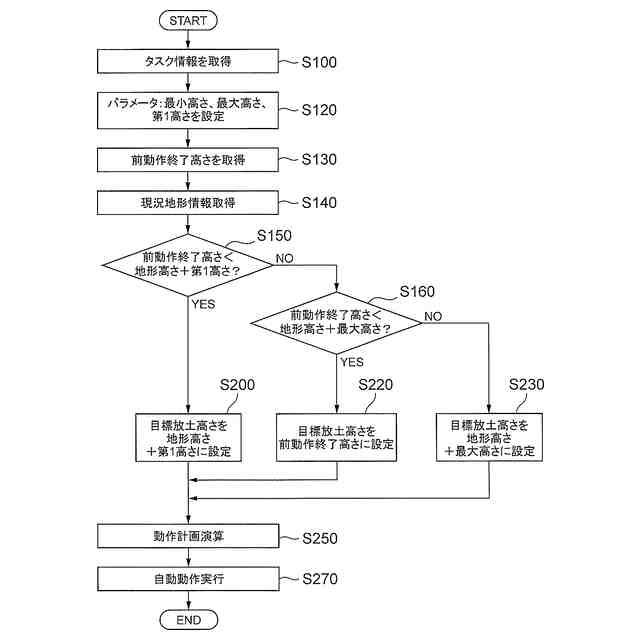
【解決手段】現況地形を取得する現況地形取得部102と作業機械の前動作終了位置を取得する前動作終了位置取得部105とを備え、現況地形と前動作終了位置との高さ方向の位置関係に基づいて目標放土高さを設定し、自動放土動作を実行する。
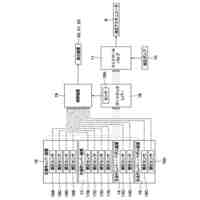
【選択図】図2
特許請求の範囲
【請求項1】
車体と、前記車体に設けられる作業装置と、
前記作業装置の動作を制御する制御装置とを備えた作業機械において、
前記作業装置の姿勢を検出する作業装置姿勢検出装置と、
前記車体の位置を検出する車体位置検出装置とをさらに備え、
前記制御装置は、
地形検出装置から放土領域内の現況地形を取得する現況地形取得部と、
前記作業装置姿勢検出装置と前記車体位置検出装置とから前記作業機械の前動作終了位置を取得する前動作終了位置取得部と、
前記放土領域内の前記現況地形と前記前動作終了位置との高さ方向の位置関係に基づいて前記作業機械の作業装置の目標放土高さを設定する目標放土高さ設定部と、
前記目標放土高さに基づいて前記作業機械の作業装置の目標位置及び動作軌道を含む動作計画を作成する動作計画部と、
前記動作計画に基づいて前記作業装置の自動動作の実行を制御する自動動作制御部と、を有することを特徴とする作業機械。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の作業機械において、
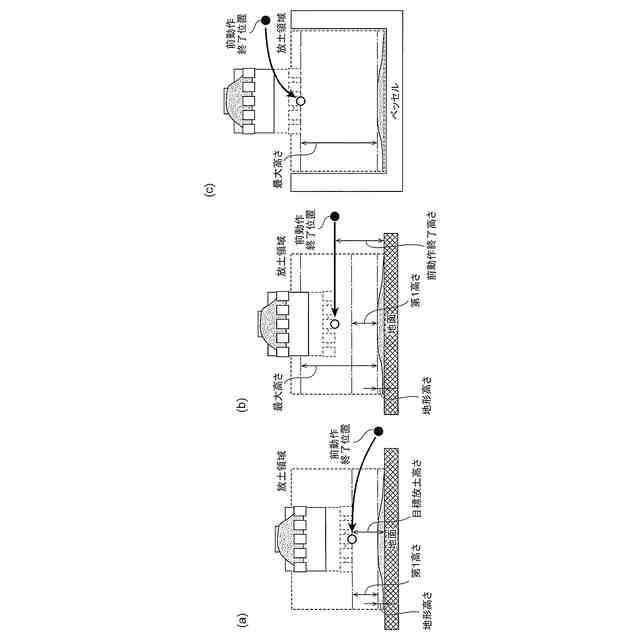
前記制御装置は、前記現況地形からの放土高さに最小高さ、最大高さ、前記最小高さよりも高く前記最大高さよりも低い第1高さを設定するパラメータ設定部を有し、
前記目標放土高さ設定部は、前記現況地形取得部と前記前動作終了位置取得部と前記パラメータ設定部からの情報に基づき、前記前動作終了位置取得部において演算された前動作終了高さが前記現況地形から前記第1高さ未満の場合は前記現況地形からの距離が前記第1高さとなる高さに前記目標放土高さを設定し、前記前動作終了高さが前記現況地形から前記第1高さ以上で前記最大高さ未満の場合は前記前動作終了高さに前記目標放土高さを設定し、前記前動作終了高さが前記現況地形から前記最大高さ以上の場合は前記現況地形からの距離が前記最大高さとなる高さに前記目標放土高さを設定することを特徴とする作業機械。
【請求項3】
請求項2に記載の作業機械において、
前記制御装置は、
前記放土領域内の初期地形形状を記憶する記憶部と、
前記記憶部と前記現況地形取得部からの情報から、前記放土領域内の各位置における放土済み土砂高さを演算する土砂高さ演算部と、を備え、
前記パラメータ設定部は、第1閾値をさらに設定し、
前記目標放土高さ設定部は、前記前動作終了高さが前記現況地形から前記第1高さ未満の場合において水平面内の目標放土位置における土砂高さが前記第1閾値未満の場合は前記現況地形からの距離が前記第1高さとなる高さに前記目標放土高さを設定し、前記土砂高さが前記第1閾値以上の場合に前記前動作終了高さが前記現況地形から前記最小高さ未満の場合は前記現況地形からの距離が前記最小高さとなる高さに前記目標放土高さを設定し、前記土砂高さが前記第1閾値以上の場合に前記前動作終了高さが前記現況地形から前記最小高さ以上の場合は前記前動作終了高さに前記目標放土高さを設定することを特徴とする作業機械。
【請求項4】
請求項3に記載の作業機械において、
前記制御装置は、
障害物・進入禁止領域検出装置から車体周囲の障害物の情報または進入禁止領域の情報を取得する取得部と、
前記動作計画部において計画された前記動作軌道上における車体と車体上方の障害物との接触または車体の車体上方の進入禁止領域への進入を判定する判定部と、
前記判定部において車体上方の障害物との接触または車体上方の進入禁止領域への進入があると判定される場合には前記目標放土高さ設定部において設定された前記目標放土高さを設定済みの前記目標放土高さより低い高さである第2高さに修正し、前記判定部において車体上方の障害物との接触または車体上方の進入禁止領域への進入があると判定される限り前記第2高さをより低い高さに更新し、前記判定部において車体上方の障害物との接触または車体上方の進入禁止領域への進入が無いと判定される場合に前記第2高さに前記目標放土高さを設定する目標放土高さ修正部と、を備えることを特徴とする作業機械。
【請求項5】
請求項4に記載の作業機械において、
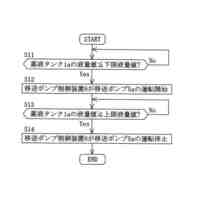
前記目標放土高さ修正部は、前記目標放土高さにおいて前記第2高さをより低い高さに更新した結果、前記現況地形からの距離が前記最小高さよりも低い高さとなった場合には実行中の自動動作を一時停止することを特徴とする作業機械。
【請求項6】
車体と、前記車体に設けられる作業装置と、
前記作業装置の動作を制御する制御装置とを備えた作業機械において、
前記作業装置の姿勢を検出する作業装置姿勢検出装置と、
前記車体の位置を検出する車体位置検出装置とをさらに備え、
前記制御装置は、
地形検出装置から作業領域内の現況地形を取得する現況地形取得部と、
前記作業機械の前動作終了位置を取得する前動作終了位置取得部と、
前記作業領域内の前記現況地形と前記前動作終了位置との高さ方向の位置関係に基づいて前記作業機械の作業装置の目標高さを設定する目標高さ設定部と、
前記目標高さに基づいて前記作業機械の作業装置の目標位置及び動作軌道を含む動作計画を作成する動作計画部と、
前記動作計画に基づいて前記作業装置の自動動作の実行を制御する自動動作制御部と、を有することを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば自動放土制御を行う作業機械に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
油圧アクチュエータで駆動される作業装置(例えばフロント作業装置)を備える作業機械(例えば油圧ショベル)によって土砂を掘削し、運搬装置(例えばベッセル)を備える運搬車両(例えばダンプトラック)に土砂を放土する掘削放土作業がある。
【0003】
このような掘削放土作業を自動制御で行うための研究が行われている。指定された位置に土砂を放土する際、放土された土砂は重力に従い落下するため、放土高さがある程度異なっていても同じ位置に放土された土砂の山が生成される。そのため、自動掘削放土作業における放土動作では、水平方向における放土位置を決定することに加えて鉛直方向における放土高さも適切に決定する必要がある。
【0004】
国際公開第2021/054436号(特許文献1)にはダンプトラックの位置を認識してショベルの放土動作の目標軌道を生成する技術が開示されている。この特許文献1では、ダンプトラックの荷台の底面に沿って所定の高さに目標軌道を生成している。
【先行技術文献】
【特許文献】
【0005】
国際公開第2021/054436号
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記特許文献1に記載の技術を用いてダンプトラックに対する放土高さを決定することは可能である。しかし、作業装置を放土位置へ移動する動作の開始位置、すなわち、例えば前動作となる掘削作業の終了位置を考慮していないため、前動作の終了位置によっては作業装置の無駄な上げ動作または下げ動作が発生し、作業効率が低下する可能性がある。一方で、ダンプトラックのベッセルに対して高い位置から放土するほどダンプトラックへの放土の衝撃は大きくなり、ダンプトラックを破損させてしまう可能性がある。そのため、放土高さは運搬装置(例えばベッセル)を破損させない高さの範囲内で、作業装置を放土位置へ移動する動作における作業装置の上げ動作または下げ動作が必要最小限となる高さであることが望ましい。
【0007】
本発明は、上記課題を解決することを目的としてなされたものであり、前動作終了高さと放土位置における地形高さとの位置関係に基づいて目標放土高さを適切に設定する作業機械を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明の作業機械は、車体と、前記車体に設けられる作業装置と、前記作業装置の動作を制御する制御装置とを備えた作業機械において、前記作業装置の姿勢を検出する作業装置姿勢検出装置と、前記車体の位置を検出する車体位置検出装置とをさらに備え、前記制御装置は、地形検出装置から放土領域内の現況地形を取得する現況地形取得部と、前記作業装置姿勢検出装置と前記車体位置検出装置とから前記作業機械の前動作終了位置を取得する前動作終了位置取得部と、前記放土領域内の前記現況地形と前記前動作終了位置との高さ方向の位置関係に基づいて前記作業機械の作業装置の目標放土高さを設定する目標放土高さ設定部と、前記目標放土高さに基づいて前記作業機械の作業装置の目標位置及び動作軌道を含む動作計画を作成する動作計画部と、前記動作計画に基づいて前記作業装置の自動動作の実行を制御する自動動作制御部と、を有することを特徴とする。
【発明の効果】
【0009】
本発明によれば、前動作終了高さと放土位置における地形高さとの位置関係に基づいて目標放土高さを適切に設定する作業機械を提供することができる。
【0010】
上記した以外の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
今日
日立建機株式会社
建設機械
15日前
日立建機株式会社
車両管理システム
2日前
個人
杭頭接合部用部材
22日前
株式会社SKT
掘削ロッド
24日前
協和工業株式会社
除塵システム
1日前
住友建機株式会社
電動ショベル
14日前
前澤工業株式会社
除塵機
23日前
日鉄建材株式会社
斜面安定化構造
15日前
株式会社エスイー
対土石流構造物
21日前
個人
洪水防止堤防 又は 津波防止堤防
21日前
住友建機株式会社
ショベル
21日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
建設機械
21日前
ヤンマーホールディングス株式会社
作業車両
2日前
日立建機株式会社
作業機械
22日前
日立建機株式会社
作業機械
28日前
株式会社丸順
土工機械のアタッチメント
28日前
住友重機械工業株式会社
ショベル
14日前
個人
丸太等の柱断面にU字型工作物を付設する柱
8日前
日立建機株式会社
建設機械用部品
21日前
ヤマハ化工建設株式会社
オープンケーソン工法
今日
住友建機株式会社
電動ショベル及びプログラム
14日前
株式会社日立建機ティエラ
建設機械
28日前
株式会社日立建機ティエラ
建設機械
28日前
日本車輌製造株式会社
杭打機の制御装置
24日前
日本車輌製造株式会社
杭打機の制御装置
24日前
株式会社日立建機ティエラ
建設機械
28日前
日本車輌製造株式会社
チュービング装置
28日前
日立建機株式会社
建設機械
28日前
株式会社ケー・エフ・シー
注入薬液移送システム
14日前
個人
地質試料採取方法
2日前
株式会社タイセン工業
支柱支持構造及び支持部材
21日前
住友重機械工業株式会社
作業機械の制御装置
2日前
調和工業株式会社
振動補助装置及び施工方法
9日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ