TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024035297
公報種別
公開特許公報(A)
公開日
2024-03-14
出願番号
2022139670
出願日
2022-09-02
発明の名称
作業機械
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/20 20060101AFI20240307BHJP(水工;基礎;土砂の移送)
要約
【課題】操作者の技量を高めることが可能な作業機械を提供する。
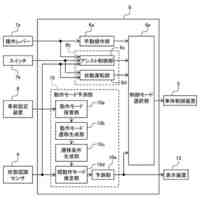
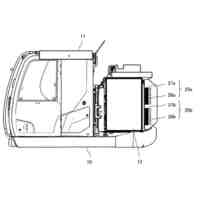
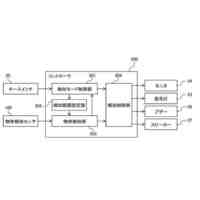
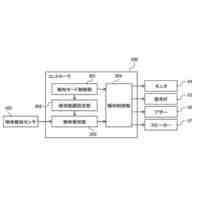
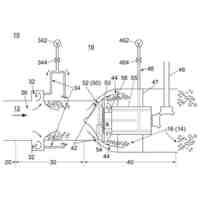
【解決手段】操作装置を操作する操作者の視線を検出する視線検出装置と、作業機械の周囲にある物体70を検出する物体検出装置と、操作装置への操作力とは反対向きの力である反力を操作装置に付与可能な反力装置と、視線検出装置の検出結果に基づいて、物体検出装置が検出した物体70に対する操作者の認知度を算出する算出手段と、物体検出装置が検出した物体70の方に作業機械の少なくとも一部を移動させるように操作装置が操作された場合に、反力装置から操作装置に反力を付与させる反力付与手段と、算出手段が算出した認知度に応じて、反力装置が付与する反力の大きさを変化させる反力変化手段と、を有する。
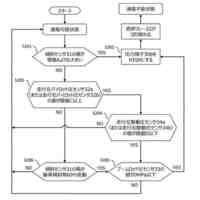
【選択図】図3
特許請求の範囲
【請求項1】
操作者によって操作される操作装置を備えた作業機械であって、
前記操作者の視線を検出する視線検出装置と、
前記作業機械の周囲にある物体を検出する物体検出装置と、
前記操作装置への操作力とは反対向きの力である反力を前記操作装置に付与可能な反力装置と、
前記視線検出装置の検出結果に基づいて、前記物体検出装置が検出した前記物体に対する前記操作者の認知度を算出する算出手段と、
前記物体検出装置が検出した前記物体の方に前記作業機械の少なくとも一部を移動させるように前記操作装置が操作された場合に、前記反力装置から前記操作装置に前記反力を付与させる反力付与手段と、
前記算出手段が算出した前記認知度に応じて、前記反力装置が付与する前記反力の大きさを変化させる反力変化手段と、
を有することを特徴とする作業機械。
続きを表示(約 1,000 文字)
【請求項2】
前記反力変化手段は、前記認知度が低いほど、前記反力の大きさを大きくする一方、前記認知度が高いほど、前記反力の大きさを小さくすることを特徴とする請求項1に記載の作業機械。
【請求項3】
前記反力の大きさの時間的変化の態様である付与態様を変化させる反力態様手段を有することを特徴とする請求項1又は2に記載の作業機械。
【請求項4】
前記反力態様手段は、前記算出手段が算出した前記認知度に応じて、前記付与態様を変化させることを特徴とする請求項3に記載の作業機械。
【請求項5】
アタッチメントを有し、
前記反力変化手段は、前記物体と前記アタッチメントとの距離に応じて、前記反力の大きさを変化させることを特徴とする請求項1又は2に記載の作業機械。
【請求項6】
アタッチメントと、
前記アタッチメントの可動範囲を設定する範囲設定手段と、
を有し、
前記反力付与手段は、前記可動範囲の外に位置する前記物体の方に前記アタッチメントを移動させるように前記操作装置が操作された場合に、前記反力装置から前記操作装置に反力を付与しないことを特徴とする請求項1又は2に記載の作業機械。
【請求項7】
アタッチメントと、
前記アタッチメントの可動範囲を設定する範囲設定手段と、
を有し、
前記算出手段は、前記可動範囲の外に位置する前記物体に対する前記認知度を算出しないことを特徴とする請求項1又は2に記載の作業機械。
【請求項8】
前記反力付与手段が前記反力装置に前記反力を付与させたときの、前記作業機械および前記物体の少なくともいずれかに関する状況をレポートとして出力する出力装置を有することを特徴とする請求項1又は2に記載の作業機械。
【請求項9】
アタッチメントと、
前記アタッチメントの動作軌跡に基づいて、前記アタッチメントの動作エリアを設定するエリア設定手段と、
を有し、
前記反力付与手段は、前記アタッチメントが前記動作エリアの外に出るように前記操作装置が操作された場合に、前記反力装置から前記操作装置に反力を付与させることを特徴とする請求項1又は2に記載の作業機械。
【請求項10】
前記反力変化手段は、前記アタッチメントが前記動作エリアの境界に近いほど、前記反力の大きさを大きくすることを特徴とする請求項9に記載の作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、操作者によって操作される操作装置に対して反力を付与可能な作業機械に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1には、作業機械を操作するオペレータ(操作者)が注視する注視点の頻度の分布に基づいて、注視点領域を設定することが開示されている。
【0003】
また、特許文献2には、作業機械を操作する運転者(操作者)が脇見運転をしている場合に、作業機械の動作を停止させることが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-133229号公報
特開2017-53092号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、操作者の認知度が低い物体の方に作業機械の少なくとも一部を移動させるように、操作者が操作装置を操作した場合に、このような操作を制限することで、このような操作を操作者が行ったことを操作者に気付かせることが、操作者の技量を高める上で有効である。しかしながら、特許文献1では、作業現場内の人や車両など、流動的で操作者が一定以上注視しない物体に対して、注視点の集中が生じない。そのため、このような物体に対する操作者の認知度を把握することができない。また、特許文献2のように、操作者が脇見運転している作業機械の動作を単に停止させるだけでは、なぜ作業機械の動作が停止したのか、どのような操作が悪かったのかを操作者に理解させることができない。そのため、操作者の技量を高めることはできない。
【0006】
本発明の目的は、操作者の技量を高めることが可能な作業機械を提供することである。
【課題を解決するための手段】
【0007】
本発明は、操作者によって操作される操作装置を備えた作業機械であって、前記操作者の視線を検出する視線検出装置と、前記作業機械の周囲にある物体を検出する物体検出装置と、前記操作装置への操作力とは反対向きの力である反力を前記操作装置に付与可能な反力装置と、前記視線検出装置の検出結果に基づいて、前記物体検出装置が検出した前記物体に対する前記操作者の認知度を算出する算出手段と、前記物体検出装置が検出した前記物体の方に前記作業機械の少なくとも一部を移動させるように前記操作装置が操作された場合に、前記反力装置から前記操作装置に前記反力を付与させる反力付与手段と、前記算出手段が算出した前記認知度に応じて、前記反力装置が付与する前記反力の大きさを変化させる反力変化手段と、を有することを特徴とする。
【0008】
また、本発明は、操作者によって操作される操作装置を備えた作業機械であって、前記操作者の視線を検出する視線検出装置と、前記操作装置への操作力とは反対向きの力である反力を前記操作装置に付与可能な反力装置と、前記視線検出装置の検出結果に基づいて、前記作業機械の周囲に対する前記操作者の認知度の分布を算出する算出手段と、前記操作装置が操作された場合に、前記反力装置から前記操作装置に前記反力を付与させる反力付与手段と、前記算出手段が算出した前記認知度の分布に応じて、前記反力装置が付与する前記反力の大きさを変化させる反力変化手段と、を有することを特徴とする。
【発明の効果】
【0009】
本発明によると、作業機械の少なくとも一部が近づこうとしている物体に対する操作者の認知度に応じて、反力装置から操作装置に付与される反力の大きさが変化されるものが提供される。よって、操作者の認知度に関する情報を反力によって操作者に伝えることができる。例えば、操作者の認知度が低い物体ほど、その物体の方への操作に対する反力を大きくすることができる。また、例えば、操作者の認知度が高い物体の方への操作に対する反力を小さくする(望ましくはゼロにする)ことで、作業機械の作業性が低下しないようにすることができる。そして、操作装置への操作力に対する反力によって、操作者の上記物体への注意が不足していることを操作者に気付かせることができる。その結果、操作者は、作業機械の一部を物体に近づける操作をする際に、この物体に十分注意しながら操作するようになる。よって、操作者の技量を高めることができる。
【0010】
また、本発明によると、作業機械の周囲に対する操作者の認知度の分布に応じて、反力装置から操作装置に付与される反力の大きさが変化されるものについても提供される。よって、操作者の認知度に関する情報を反力によって操作者に伝えることができる。例えば、作業機械の周囲の領域の認知度が低ければ、認知度が低い領域の方への操作に対する反力を大きくすることができる。また、例えば、操作者の認知度が高い領域の方への操作に対する反力を小さくする(望ましくはゼロにする)ことで、作業機械の作業性が低下しないようにすることができる。そして、操作装置への操作力に対する反力によって、作業機械の移動する方向への注意が不足していることを操作者に気付かせることができる。その結果、操作者は、作業機械の一部を移動させる操作をする際に、移動方向に十分注意しながら操作するようになる。よって、操作者の技量を高めることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
杭頭接合部用部材
10日前
株式会社SKT
掘削ロッド
12日前
住友建機株式会社
電動ショベル
2日前
前澤工業株式会社
除塵機
11日前
日鉄建材株式会社
斜面安定化構造
3日前
個人
洪水防止堤防 又は 津波防止堤防
9日前
株式会社エスイー
対土石流構造物
9日前
住友建機株式会社
ショベル
9日前
日立建機株式会社
作業機械
9日前
日立建機株式会社
建設機械
9日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業機械
9日前
日立建機株式会社
作業機械
16日前
東栄商興株式会社
護岸構造
22日前
株式会社丸順
土工機械のアタッチメント
16日前
住友重機械工業株式会社
ショベル
2日前
株式会社丸島アクアシステム
除塵装置
19日前
日立建機株式会社
電動式建設機械
18日前
日立建機株式会社
建設機械用部品
9日前
日立建機株式会社
電動式建設機械
17日前
株式会社ジオック技研
既設杭の引き抜き方法
18日前
日立建機株式会社
作業機
17日前
日本車輌製造株式会社
チュービング装置
16日前
住友建機株式会社
電動ショベル及びプログラム
2日前
日本車輌製造株式会社
杭打機の制御装置
12日前
日本車輌製造株式会社
杭打機の制御装置
12日前
株式会社日立建機ティエラ
建設機械
16日前
株式会社日立建機ティエラ
建設機械
16日前
株式会社日立建機ティエラ
建設機械
16日前
日立建機株式会社
建設機械
16日前
株式会社ケー・エフ・シー
注入薬液移送システム
2日前
株式会社タイセン工業
支柱支持構造及び支持部材
9日前
株式会社小松製作所
作業機械
10日前
ヤンマーホールディングス株式会社
建設機械
18日前
日立建機株式会社
深礎掘削機
17日前
八千代エンジニヤリング株式会社
気泡発生システム
4日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ