TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024015957
公報種別
公開特許公報(A)
公開日
2024-02-06
出願番号
2023033695
出願日
2023-03-06
発明の名称
物品搬送設備
出願人
株式会社ダイフク
代理人
弁理士法人R&C
主分類
G05D
1/43 20240101AFI20240130BHJP(制御;調整)
要約
【課題】走行経路の分岐部または合流部を含む区間における搬送車の通行を効率的に行うことにより、物品搬送設備の全体としての搬送効率を高める。
【解決手段】搬送車Vは、第1経路に沿って走行する場合には、第1通過地点を通過するための第1通過許可を区間制御装置Czに求める。搬送車Vは、第2経路に沿って走行する場合には、第2通過地点を通過するための第2通過許可を区間制御装置Czに求める。区間制御装置Czは、第1通過許可及び第2通過許可の双方を搬送車Vから求められた場合には、第1通過地点及び第2通過地点の双方が先行する他の搬送車Vによって占有されていない非占有状態であることを条件として、第1経路又は第2経路から接続経路への搬送車Vの走行を許可すると共に、走行を許可した当該搬送車Vに第1通過地点及び第2通過地点の双方を占有させる。
【選択図】図5
特許請求の範囲
【請求項1】
物品を搬送する搬送車と、
前記搬送車が走行する走行経路と、
前記走行経路のうちの特定の区間である特定区間を走行する前記搬送車に通過許可を与えて当該搬送車の制御を行う区間制御装置と、を備えた物品搬送設備であって、
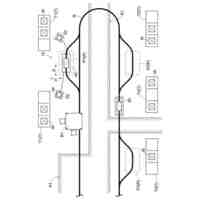
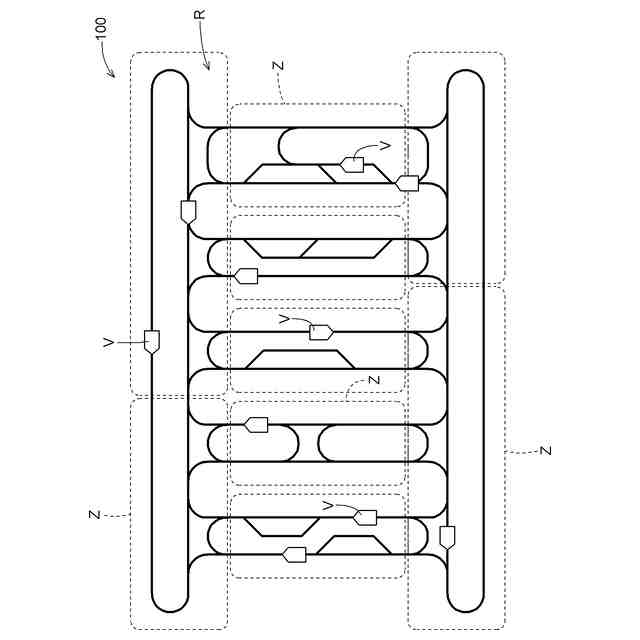
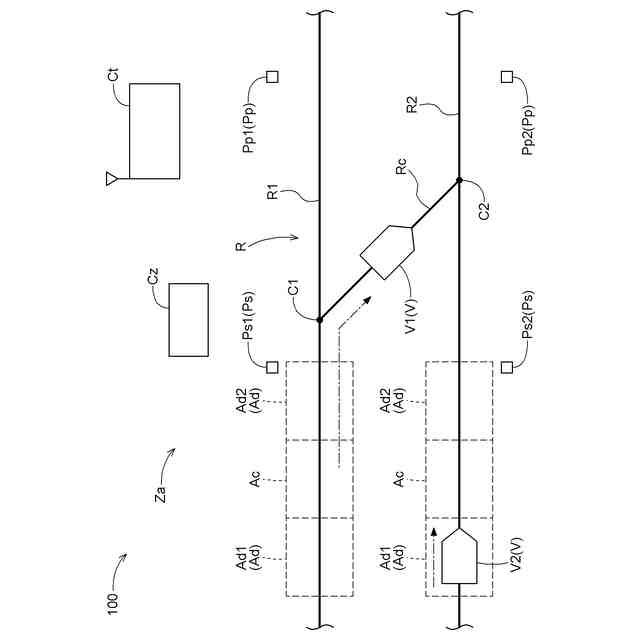
前記特定区間には、互いに交差しない第1経路及び第2経路と、前記第1経路における第1接続部と前記第2経路における第2接続部とを接続する接続経路と、が含まれ、
前記第1経路及び前記第2経路のそれぞれは、上流側から下流側へ向かって一方向に前記搬送車が走行する経路であり、
前記第1経路における前記第1接続部よりも下流側に、第1通過地点が設定され、
前記第2経路における前記第2接続部よりも下流側に、第2通過地点が設定され、
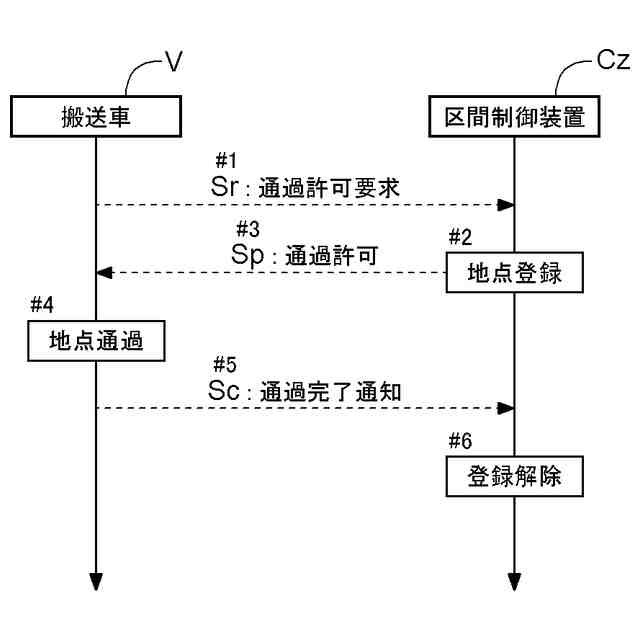
前記搬送車は、前記第1接続部を通って前記第1経路に沿って走行する場合には、前記第1接続部よりも上流側において、前記第1通過地点を通過するための前記通過許可である第1通過許可を前記区間制御装置に求め、前記第1通過許可が得られた場合には前記第1接続部を通過して前記第1通過地点へ向かい、前記第1通過許可が得られない場合には前記第1接続部よりも上流側で停止し、
前記搬送車は、前記第2接続部を通って前記第2経路に沿って走行する場合には、前記第2接続部よりも上流側において、前記第2通過地点を通過するための前記通過許可である第2通過許可を前記区間制御装置に求め、前記第2通過許可が得られた場合には前記第2接続部を通過して前記第2通過地点へ向かい、前記第2通過許可が得られない場合には前記第2接続部よりも上流側で停止し、
前記区間制御装置は、前記第1通過許可を前記搬送車に与えた場合には、当該第1通過許可にかかる前記第1通過地点を当該搬送車に占有させ、前記第2通過許可を前記搬送車に与えた場合には、当該第2通過許可にかかる前記第2通過地点を当該搬送車に占有させ、
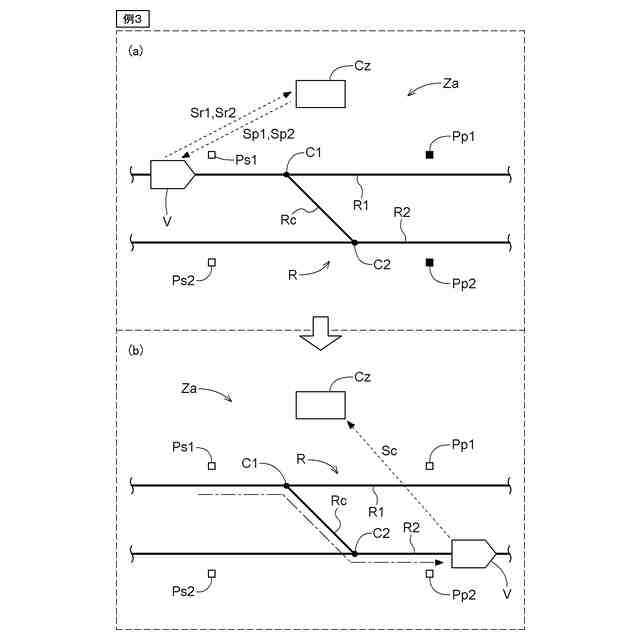
前記搬送車は、前記第1経路又は前記第2経路から前記接続経路へ走行しようとする場合には、前記第1通過許可及び前記第2通過許可の双方を前記区間制御装置に求め、
前記区間制御装置は、前記第1通過許可及び前記第2通過許可の双方を前記搬送車から求められた場合には、前記第1通過地点及び前記第2通過地点の双方が先行する他の前記搬送車によって占有されていない非占有状態であることを条件として、前記第1経路又は前記第2経路から前記接続経路への前記搬送車の走行を許可すると共に、走行を許可した当該搬送車に前記第1通過地点及び前記第2通過地点の双方を占有させる、物品搬送設備。
続きを表示(約 1,000 文字)
【請求項2】
前記搬送車は、前記第1通過地点又は前記第2通過地点を通過した後、前記区間制御装置に対して通過完了通知を行い、
前記区間制御装置は、前記搬送車から前記通過完了通知を受け取った後、当該通過完了通知にかかる前記第1通過地点又は前記第2通過地点について当該搬送車による占有を解除する、請求項1に記載の物品搬送設備。
【請求項3】
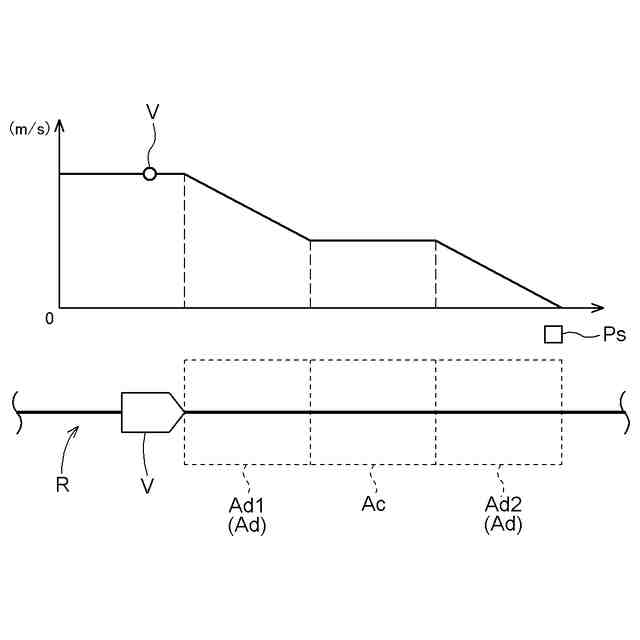
前記第1経路における前記第1接続部よりも上流側、及び前記第2経路における前記第2接続部よりも上流側のそれぞれに、前記搬送車が前記通過許可を得られなかった場合に停止する停止地点が設定され、
前記搬送車は、前記第1経路及び前記第2経路のそれぞれにおいて前記停止地点よりも上流側を走行中に、前記区間制御装置に対して前記第1通過許可又は前記第2通過許可を求める、請求項1に記載の物品搬送設備。
【請求項4】
前記第1経路及び前記第2経路のそれぞれにおける前記停止地点よりも上流側に、前記搬送車がそれぞれの前記停止地点で停止するために減速走行する区間である減速区間が設定され、
前記搬送車は、前記減速区間での前記減速走行中に前記通過許可を得られた場合には、前記減速走行から等速走行に移行した後に加速する、請求項3に記載の物品搬送設備。
【請求項5】
前記第1経路及び前記第2経路のそれぞれにおける前記停止地点よりも上流側に、前記搬送車がそれぞれの前記停止地点で停止するために減速走行する区間である第1減速区間と、前記第1減速区間の下流側に隣接して設定されて前記搬送車が等速走行する区間である等速区間と、前記等速区間の下流側に隣接して設定されて前記搬送車が前記停止地点に停止するまで減速走行する区間である第2減速区間と、が設定されている、請求項3に記載の物品搬送設備。
【請求項6】
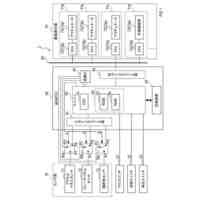
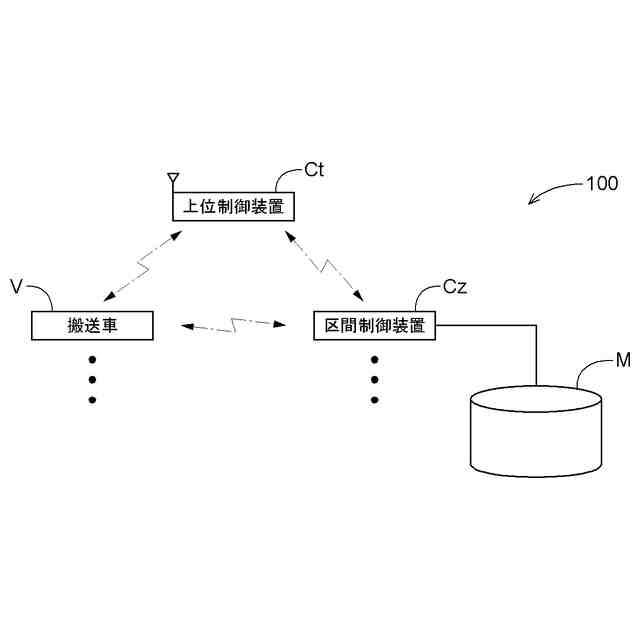
上位制御装置を備え、
前記走行経路が、複数の制御領域に区分され、
複数の前記制御領域のそれぞれに、単数又は複数の前記特定区間が含まれ、
複数の前記制御領域のそれぞれに対応して、前記区間制御装置が設けられ、
前記上位制御装置が複数の前記区間制御装置を制御するように構成され、
前記上位制御装置は、前記区間制御装置から問い合わせがあった場合、前記特定区間における前記搬送車の存否に基づいて、前記搬送車が前記第1通過地点又は前記第2通過地点を通過したか否かを判断する、請求項1から5のいずれか一項に記載の物品搬送設備。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物品を搬送する搬送車と、前記搬送車が走行する走行経路と、前記走行経路のうちの特定の区間である特定区間を走行する前記搬送車に通過許可を与えて当該搬送車の制御を行う区間制御装置と、を備えた物品搬送設備に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
このような物品搬送設備の一例が、搬送台車システムとして、特開2006-313463号公報(特許文献1)に開示されている。以下、背景技術の説明において括弧内に示された符号は、特許文献1のものである。
【0003】
特許文献1に開示されたシステムでは、搬送車(5)の走行経路の分岐部または合流部にロックポイントを設け、このようなロックポイントが設けられた区間(以下、「制御区間」という)を単位として、ロックポイントにおける搬送車(5)の通行の認否を判断している。
【0004】
搬送車(5)は、ロックポイントが設けられた制御区間への進入前に、ゾーンコントローラ(11)に対して、他の搬送車(5)の当該制御区間への進入の排斥を求めるブロッキング要求を行う。ゾーンコントローラ(11)は、ブロッキング要求を行った搬送車(5)に対して当該制御区間の通行を許可する場合は、ブロッキング許可を行い、他の搬送車(5)の通行を排斥する。ゾーンコントローラ(11)は、搬送車(5)の通行後は、当該制御区間におけるブロッキングを解除して、他の搬送車(5)を受け入れ可能な状態となる。
【先行技術文献】
【特許文献】
【0005】
特開2006-313463号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献1に開示されたシステムでは、ロックポイントにおける搬送車(5)の通行の認否を制御区間単位で判断しているため、1つの制御区間に同時に複数の搬送車(5)が存在し得ない。そのため、当該制御区間における搬送車の通行の効率が低く、同様の制御区間が多数存在する場合には、物品搬送設備の全体として搬送効率を高めることに限界があった。
【0007】
上記実状に鑑みて、走行経路の分岐部または合流部を含む区間における搬送車の通行を効率的に行うことにより、物品搬送設備の全体としての搬送効率を高めることができる技術の実現が望まれている。
【課題を解決するための手段】
【0008】
物品を搬送する搬送車と、
前記搬送車が走行する走行経路と、
前記走行経路のうちの特定の区間である特定区間を走行する前記搬送車に通過許可を与えて当該搬送車の制御を行う区間制御装置と、を備えた物品搬送設備であって、
前記特定区間には、互いに交差しない第1経路及び第2経路と、前記第1経路における第1接続部と前記第2経路における第2接続部とを接続する接続経路と、が含まれ、
前記第1経路及び前記第2経路のそれぞれは、上流側から下流側へ向かって一方向に前記搬送車が走行する経路であり、
前記第1経路における前記第1接続部よりも下流側に、第1通過地点が設定され、
前記第2経路における前記第2接続部よりも下流側に、第2通過地点が設定され、
前記搬送車は、前記第1接続部を通って前記第1経路に沿って走行する場合には、前記第1接続部よりも上流側において、前記第1通過地点を通過するための前記通過許可である第1通過許可を前記区間制御装置に求め、前記第1通過許可が得られた場合には前記第1接続部を通過して前記第1通過地点へ向かい、前記第1通過許可が得られない場合には前記第1接続部よりも上流側で停止し、
前記搬送車は、前記第2接続部を通って前記第2経路に沿って走行する場合には、前記第2接続部よりも上流側において、前記第2通過地点を通過するための前記通過許可である第2通過許可を前記区間制御装置に求め、前記第2通過許可が得られた場合には前記第2接続部を通過して前記第2通過地点へ向かい、前記第2通過許可が得られない場合には前記第2接続部よりも上流側で停止し、
前記区間制御装置は、前記第1通過許可を前記搬送車に与えた場合には、当該第1通過許可にかかる前記第1通過地点を当該搬送車に占有させ、前記第2通過許可を前記搬送車に与えた場合には、当該第2通過許可にかかる前記第2通過地点を当該搬送車に占有させ、
前記搬送車は、前記第1経路又は前記第2経路から前記接続経路へ走行しようとする場合には、前記第1通過許可及び前記第2通過許可の双方を前記区間制御装置に求め、
前記区間制御装置は、前記第1通過許可及び前記第2通過許可の双方を前記搬送車から求められた場合には、前記第1通過地点及び前記第2通過地点の双方が先行する他の前記搬送車によって占有されていない非占有状態であることを条件として、前記第1経路又は前記第2経路から前記接続経路への前記搬送車の走行を許可すると共に、走行を許可した当該搬送車に前記第1通過地点及び前記第2通過地点の双方を占有させる。
【0009】
上記のような特定区間では、第1経路と第2経路とが互いに交差しないため、接続経路を通行する搬送車が存在しない場合には、第1経路と第2経路とをそれぞれ別の搬送車が同時に通行することが可能である。本構成によれば、第1経路に設けられた第1通過地点と第2経路に設けられた第2通過地点とで、搬送車の通行の認否を個別に判断することができる。従って、複数の搬送車がそれぞれ接続経路を通行せずに第1経路又は第2経路を通行する場合には、それら複数の搬送車に第1経路と第2経路とを同時に走行させることができる。そのため、特定区間全体で搬送車の通行の認否を判断する場合に比べて、特定区間における搬送車の通行を効率的に行うことが可能となる。一方、搬送車が接続経路を介して第1経路から第2経路へ走行或いは第2経路から第1経路へ走行する場合には、区間制御装置は、第1通過地点及び第2通過地点の双方が他の搬送車によって占有されていない非占有状態であることを条件として、搬送車の走行を許可すると共に、走行を許可した当該搬送車に第1通過地点及び第2通過地点の双方を占有させる。これにより、特定区間において複数の搬送車が互いに干渉することを回避できる。以上により、複数の搬送車が互いに干渉することを回避しつつ、物品搬送設備の全体としての搬送効率を高めることができる。
【0010】
本開示に係る技術のさらなる特徴と利点は、図面を参照して記述する以下の例示的かつ非限定的な実施形態の説明によってより明確になるであろう。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
1か月前
アズビル株式会社
流量制御装置
20日前
アズビル株式会社
電圧出力回路
1か月前
ミネベアミツミ株式会社
入力装置
11日前
トヨタ自動車株式会社
自動走行搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
19日前
株式会社クボタ
操作機構及び作業車
1か月前
株式会社クボタ
故障診断装置
18日前
日本プラスト株式会社
節度感付加装置
1か月前
株式会社デンソー
制御装置
24日前
リックス株式会社
状態検出装置
14日前
株式会社デンソー
制御装置
24日前
村田機械株式会社
搬送車システム
4日前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社GSユアサ
電力変換装置
27日前
株式会社デンソー
電子制御装置
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
24日前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
26日前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
村田機械株式会社
走行車システム
1か月前
株式会社ディスコ
加工装置
1か月前
株式会社デンソー
ペダル装置
24日前
愛三工業株式会社
弁システム
1か月前
DMG森精機株式会社
工作機械
1か月前
株式会社デンソー
ペダル装置
1か月前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
多摩川精機株式会社
突入電流防止回路
4日前
株式会社ダイフク
無人航空機の搬送システム
26日前
学校法人早稲田大学
ロボット、軌道計画装置及びプログラム
1か月前
THK株式会社
変数の突合方法及びプログラム
1か月前
パナソニックIPマネジメント株式会社
位置調整装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ