TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024006577
公報種別
公開特許公報(A)
公開日
2024-01-17
出願番号
2022107612
出願日
2022-07-04
発明の名称
フォークリフト
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
B66F
9/24 20060101AFI20240110BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】差込孔からフォークを抜き出す際のフォークの差込部とパレットの対向面との接触を抑制できるフォークリフトを提供すること。
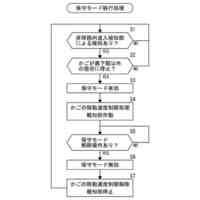
【解決手段】荷置き作業を実行するフォークリフトであって、昇降制御部は、荷置き作業において、フォークを後傾させた状態で昇降装置によってフォークを下降させている場合に、測距センサの検出値Dvが、第1規定値Lth1を上回るとき、昇降装置によるフォークの下降を停止させる停止処理S4,S10を実行する。傾動制御部は、停止処理S10の後に実行する処理であって、測距センサの検出値Dvが第2規定値を上回っていなければ、差込部の上面の全域がパレットから離れるまでフォークを前傾させるべく傾動装置を制御する前傾処理S12を実行し、停止処理S4,S10の後に差込部の上面の全域がパレットから離れているとき、前傾処理S12を実行しない。
【選択図】図12
特許請求の範囲
【請求項1】
車体と、
パレットを積載するフォークと、
前記フォークを昇降させる昇降装置と、
前記フォークを傾動させる傾動装置と、
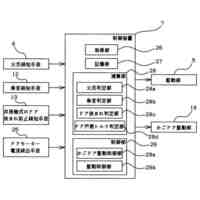
前記昇降装置を制御する昇降制御部と、
前記傾動装置を制御する傾動制御部と、を備え、
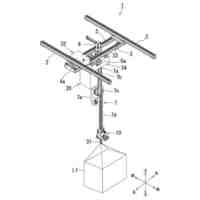
前記フォークに前記パレットを積載した状態で前記昇降装置によって前記フォークを下降させることにより前記パレットを載置面に対して載置する荷置き作業を実行するフォークリフトであって、
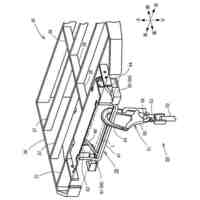
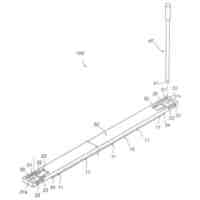
前記パレットが前記載置面に載置されたときに前記フォークが差し込まれている孔を差込孔とし、前記フォークのうち前記差込孔に差し込まれる部分を差込部とし、前記差込部の端部から立設する部分を基部とすると、
前記基部に設けられており、検出対象までの距離を検出する測距センサを備え、
前記昇降制御部は、前記荷置き作業において、前記フォークを後傾させた状態で前記昇降装置によって前記フォークを下降させている場合に、前記測距センサの検出値が、前記基部と前記パレットとの当接時における前記検出対象としての前記パレットと前記測距センサとの間の距離を示す第1規定値を上回るとき、前記昇降装置による前記フォークの下降を停止させる停止処理を実行し、
前記傾動制御部は、前記停止処理の後に実行する処理であって、前記測距センサの検出値が、前記差込孔を形成する前記パレットの内面のうち前記差込部の上面に対向する対向面における前記基部から最も離れた縁と前記測距センサとの間の距離を示す第2規定値を上回っていなければ、前記差込部の上面の全域が前記パレットから離れるまで前記フォークを前傾させるべく前記傾動装置を制御する前傾処理を実行し、前記停止処理の後に前記差込部の上面の全域が前記パレットから離れているとき、前記前傾処理を実行しないことを特徴とするフォークリフト。
続きを表示(約 990 文字)
【請求項2】
前記フォークを前後に移動させる移動装置と、
ティルトセンサと、
前記移動装置を制御する移動制御部と、を備え、
前記昇降制御部及び前記移動制御部により前記差込部の上面の全域が前記パレットから離れた後に引き抜き処理が実行され、
前記引き抜き処理は、前記差込部の上面の全域が前記パレットから離れているときの前記ティルトセンサの検出結果に基づく前記フォークの傾斜角度で延びる前記差込部の目標軌道に沿って前記差込部が前記差込孔から抜き出されるように前記昇降制御部が前記昇降装置を制御し、且つ前記移動制御部が前記移動装置を制御する処理である、請求項1に記載のフォークリフト。
【請求項3】
前記フォークリフトは、リーチ型フォークリフトであって、
ティルトセンサを備え、
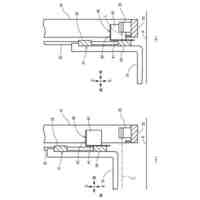
前記フォークは、前記昇降装置及び前記傾動装置により前記フォークと一体的に変位する取付部に取り付けられており、
前記傾動装置は、ティルトシリンダを含み、
前記ティルトシリンダは、作動油の給排に応じてシリンダチューブに対して出没するロッドであって、先端が前記取付部に接離するティルトロッドを有し、
前記ティルトロッドの先端が前記取付部を押圧するように前記ティルトロッドが前記シリンダチューブから突出することにより前記フォークは後傾するとともに、前記ティルトロッドの先端が前記取付部から離れるように前記ティルトロッドが前記シリンダチューブに没入することにより前記フォークは当該フォークの自重により前傾し、
前記傾動制御部は、前記荷置き作業において前記フォークが下降している間に前記フォークの傾斜角度が変化しないように前記傾動装置を制御しており、前記荷置き作業において前記測距センサの検出値が前記第1規定値となる前に前記ティルトセンサの検出結果に基づく前記フォークの前記傾斜角度が変化した場合、前記フォークの下降を停止させる、請求項1又は請求項2に記載のフォークリフト。
【請求項4】
ティルトセンサを備え、
前記傾動制御部は、前記前傾処理の途中で前記ティルトセンサの検出結果に基づく前記フォークの傾斜角度が変化していない場合に前記前傾処理を終了する、請求項1又は請求項2に記載のフォークリフト。
発明の詳細な説明
【技術分野】
【0001】
本発明は、フォークリフトに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、フォークに積載されたパレットを搬送する特許文献1に記載されるようなフォークリフトが知られている。
【先行技術文献】
【特許文献】
【0003】
特許第6436553号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
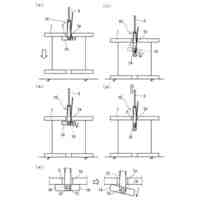
フォークを下降させることによりパレットが載置面に載置されたときにフォークが差し込まれている孔を差込孔とする。フォークのうち差込孔に差し込まれている部分を差込部とする。差込孔を形成するパレットの内面のうち差込部の上面に対向する面を対向面とする。
【0005】
ところで、差込部が対向面に接触していると、フォークを差込孔から抜き出すときに差込部が対向面に引っかかる虞がある。このため、フォークを差込孔から適切に抜き出すことが困難になる。
【課題を解決するための手段】
【0006】
上記課題を解決するフォークリフトは、車体と、パレットを積載するフォークと、前記フォークを昇降させる昇降装置と、前記フォークを傾動させる傾動装置と、前記昇降装置を制御する昇降制御部と、前記傾動装置を制御する傾動制御部と、を備え、前記フォークに前記パレットを積載した状態で前記昇降装置によって前記フォークを下降させることにより前記パレットを載置面に対して載置する荷置き作業を実行するフォークリフトであって、前記パレットが前記載置面に載置されたときに前記フォークが差し込まれている孔を差込孔とし、前記フォークのうち前記差込孔に差し込まれる部分を差込部とし、前記差込部の端部から立設する部分を基部とすると、前記基部に設けられており、検出対象までの距離を検出する測距センサを備え、前記昇降制御部は、前記荷置き作業において、前記フォークを後傾させた状態で前記昇降装置によって前記フォークを下降させている場合に、前記測距センサの検出値が、前記基部と前記パレットとの当接時における前記検出対象としての前記パレットと前記測距センサとの間の距離を示す第1規定値を上回るとき、前記昇降装置による前記フォークの下降を停止させる停止処理を実行し、前記傾動制御部は、前記停止処理の後に実行する処理であって、前記測距センサの検出値が、前記差込孔を形成する前記パレットの内面のうち前記差込部の上面に対向する対向面における前記基部から最も離れた縁と前記測距センサとの間の距離を示す第2規定値を上回っていなければ、前記差込部の上面の全域が前記パレットから離れるまで前記フォークを前傾させるべく前記傾動装置を制御する前傾処理を実行し、前記停止処理の後に前記差込部の上面の全域が前記パレットから離れているとき、前記前傾処理を実行しない。
【0007】
上記構成によれば、パレットが載置面に接触した後にフォークが下降すると、基本的に差込部の基部側がパレットの対向面から離れる。すると、測距センサは、パレットにおける基部と対向する部位よりも離れた位置と自身との距離を検出する。よって、測距センサの検出値は、第1規定値を上回る。その結果、荷置き作業において測距センサの検出値が第1規定値を上回るとき、停止処理が実行される。すなわち、荷置き作業において少なくとも差込部の基部側がパレットから離れるときにフォークの下降が停止する。そして、停止処理後に測距センサの検出値が第2規定値を上回っていなければ、前傾処理が実行される。すなわち、差込部の基部側がパレットから離れており、且つ差込部の先端側がパレットを支持している状態のときに前傾処理が実行される。より詳しくは、測距センサの検出値が測距センサからパレットの対向面までの距離となるときに前傾処理が実行される。前傾処理は、差込部の上面の全域がパレットから離れるまで実行される。すなわち、前傾処理は、パレットの全体が載置面に載置され、且つ差込部の先端側がパレットから離れるまで実行される。前傾処理は、停止処理の後に差込部の上面の全域がパレットから離れているときに実行されない。よって、荷置き作業において、差込部がパレットの対向面に接触しないように停止処理及び前傾処理が行われる。したがって、差込孔からフォークを抜き出す際のフォークの差込部とパレットの対向面との接触を抑制できる。
【0008】
上記のフォークリフトにおいて、前記フォークを前後に移動させる移動装置と、ティルトセンサと、前記移動装置を制御する移動制御部と、を備え、前記昇降制御部及び前記移動制御部により前記差込部の上面の全域が前記パレットから離れた後に引き抜き処理が実行され、前記引き抜き処理は、前記差込部の上面の全域が前記パレットから離れているときの前記ティルトセンサの検出結果に基づく前記フォークの傾斜角度で延びる前記差込部の目標軌道に沿って前記差込部が前記差込孔から抜き出されるように前記昇降制御部が前記昇降装置を制御し、且つ前記移動制御部が前記移動装置を制御する処理であるとよい。
【0009】
上記構成によれば、引き抜き処理により、パレットの対向面に差込部が接触しない状態を維持しつつ、差込孔から差込部を抜き出すことができる。よって、対向面にフォークが引っかかることがなくなるため、差込孔からのフォークの引き抜きを好適に実行できる。
【0010】
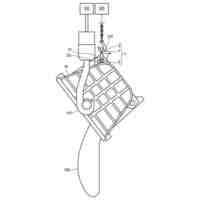
上記のフォークリフトにおいて、前記フォークリフトは、リーチ型フォークリフトであって、ティルトセンサを備え、前記フォークは、前記昇降装置及び前記傾動装置により前記フォークと一体的に変位する取付部に取り付けられており、前記傾動装置は、ティルトシリンダを含み、前記ティルトシリンダは、作動油の給排に応じてシリンダチューブに対して出没するロッドであって、先端が前記取付部に接離するティルトロッドを有し、前記ティルトロッドの先端が前記取付部を押圧するように前記ティルトロッドが前記シリンダチューブから突出することにより前記フォークは後傾するとともに、前記ティルトロッドの先端が前記取付部から離れるように前記ティルトロッドが前記シリンダチューブに没入することにより前記フォークは当該フォークの自重により前傾し、前記傾動制御部は、前記荷置き作業において前記フォークが下降している間に前記フォークの傾斜角度が変化しないように前記傾動装置を制御しており、前記荷置き作業において前記測距センサの検出値が前記第1規定値となる前に前記ティルトセンサの検出結果に基づく前記フォークの前記傾斜角度が変化した場合、前記フォークの下降を停止させるとよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
リフト装置
12か月前
ユニパルス株式会社
吊具
3か月前
ユニパルス株式会社
吊具
3か月前
個人
高低間移動補助装置
9か月前
個人
吊りバケット装置
5か月前
ユニパルス株式会社
吊具装置
9か月前
ユニパルス株式会社
吊具装置
9か月前
株式会社フジタ
昇降装置
8か月前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
24日前
株式会社豊田自動織機
産業車両
8か月前
株式会社豊田自動織機
産業車両
5か月前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
2か月前
株式会社豊田自動織機
荷役車両
1か月前
有限会社矢島製作所
ローダ
9か月前
株式会社アイセイ
搬送装置
6か月前
株式会社北川鉄工所
吊荷制御方法
2か月前
ユニパルス株式会社
物品昇降装置
8か月前
株式会社ノセ技研
バケット
5か月前
ユニパルス株式会社
荷役助力装置
8か月前
ユニパルス株式会社
荷役助力装置
19日前
ダイコー興産株式会社
引掛具
9か月前
大同特殊鋼株式会社
治具
1か月前
フジテック株式会社
エレベータ
4か月前
フジテック株式会社
エレベータ
9か月前
フジテック株式会社
エレベータ
3か月前
株式会社ニシキ
可変型吊り天秤
3日前
フジテック株式会社
エレベータ
2か月前
株式会社豊田自動織機
フォークリフト
7か月前
大和ハウス工業株式会社
可動架台
7か月前
フジテック株式会社
乗客コンベア
7か月前
フジテック株式会社
乗客コンベア
9か月前
フジテック株式会社
乗客コンベア
8か月前
フジテック株式会社
乗客コンベア
11か月前
フジテック株式会社
乗客コンベア
11か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ