TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023178879
公報種別
公開特許公報(A)
公開日
2023-12-18
出願番号
2022091840
出願日
2022-06-06
発明の名称
作業機械
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
B66C
13/16 20060101AFI20231211BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】搬送物の重量の算出の精度を向上させる。
【解決手段】作業機械は、上部旋回体3に取り付けられるアタッチメント4と、アタッチメント4の先端に設けられるリフティングマグネット6とを有し、アタッチメント4を駆動させる油圧シリンダ7,8,9と、アタッチメント4のうち、リフティングマグネット6より上部旋回体側3に、リフティングマグネット6を回転させる回転機構P7とをさらに有し、リフティングマグネット6に搬送物が吸着した状態で、回転機構P7によってリフティングマグネット6を回転させた、複数の回転角度の各々で計測された油圧シリンダ7,8,9のシリンダ圧に基づいて、リフティングマグネット6に吸着した搬送物の重心GSの位置を算出し、算出された重心に基づいて搬送物の重量Wsを測定する。
【選択図】図3
特許請求の範囲
【請求項1】
上部旋回体に取り付けられるアタッチメントと、
前記アタッチメントの先端に設けられるリフティングマグネットと、を有し、
前記リフティングマグネットに吸着した搬送物の重心の位置を算出し、算出された前記重心の位置に基づいて前記搬送物の重量を算出する、
作業機械。
続きを表示(約 980 文字)
【請求項2】
前記アタッチメントを駆動させる油圧シリンダと、
前記アタッチメントのうち、前記リフティングマグネットより前記上部旋回体側に、前記リフティングマグネットを回転させる回転機構と、をさらに有し、
前記リフティングマグネットに前記搬送物が吸着した状態で、前記回転機構によって前記リフティングマグネットを回転させた、複数の回転角度の各々で計測された前記油圧シリンダのシリンダ圧に基づいて、前記リフティングマグネットに吸着した前記搬送物の前記重心の位置を算出し、算出された前記重心の位置に基づいて前記搬送物の重量を算出する、
請求項1に記載の作業機械。
【請求項3】
前記リフティングマグネットに吸着した第1の搬送物について算出された前記重心の位置を記憶部に記憶し、前記リフティングマグネットに吸着した、前記第1の搬送物とは別の第2の搬送物について、記憶部に記憶された前記重心の位置に基づいて前記第2の搬送物の重量を算出する、
請求項1又は2に記載の作業機械。
【請求項4】
所定の条件を満たした場合に、前記リフティングマグネットに吸着した、前記第1の搬送物から前記重心の位置を算出し、算出された前記重心の位置を前記記憶部に記憶する、
請求項3に記載の作業機械。
【請求項5】
前記リフティングマグネットに吸着した前記搬送物を認識可能な空間認識装置をさらに有し、
前記空間認識装置による認識結果に基づいて、前記リフティングマグネットに吸着した前記搬送物の前記重心の位置を算出する、
請求項1に記載の作業機械。
【請求項6】
上部旋回体に取り付けられるアタッチメントと、
前記アタッチメントの先端に設けられるリフティングマグネットと、
前記アタッチメントのうち、前記リフティングマグネットより前記上部旋回体側に、前記リフティングマグネットを回転させる回転機構と、を有し、
前記リフティングマグネットに搬送物が吸着した状態において、前記リフティングマグネットに前記搬送物を吸着させている面が、水平面と略平行の状態を維持するように、前記回転機構を制御した状態で、前記搬送物の重量を算出する、
作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来から、アタッチメントの先端に設けられたリフティングマグネットに鉄屑等を吸着させ、且つ当該アタッチメントを用いて持ち上げて、ダンプトラックの荷台等に積み込む作業機械が知られている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/022454号
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来の技術では、作業機械に装着されているリフティングマグネットの重量を考慮するが、持ち上げた物体の重心を考慮したものでない。リフティングマグネットを装着した作業機械においては、持ち上げた物体の重心を考慮せずに、持ち上げた物体の重量を算出した場合、算出された物体の重量に、当該物体の重心の偏りに基づく誤差が含まれる可能性がある。
【0005】
本発明の一態様は、リフティングマグネットに吸着した搬送物の重心を考慮することで、搬送物の重量の算出精度を向上させる技術を提供する。
【課題を解決するための手段】
【0006】
本発明の一態様に係る作業機械は、上部旋回体に取り付けられるアタッチメントと、アタッチメントの先端に設けられるリフティングマグネットと、を有し、リフティングマグネットに吸着した搬送物の重心を算出し、算出された重心に基づいて搬送物の重量を測定する。
【発明の効果】
【0007】
本発明の一態様によれば、搬送物の重量の算出の精度を向上させることができる。
【図面の簡単な説明】
【0008】
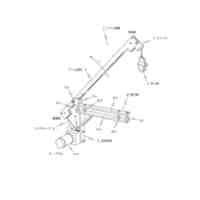
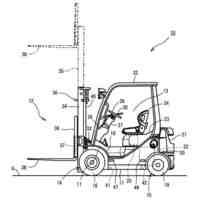
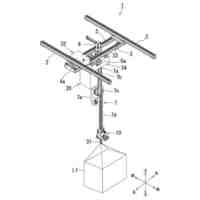
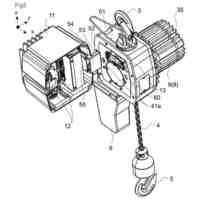
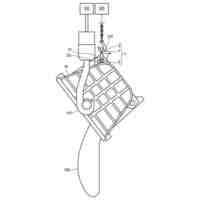
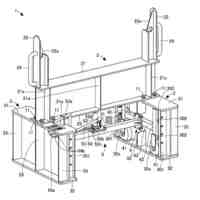
図1は、実施形態に係る作業機械の側面図である。
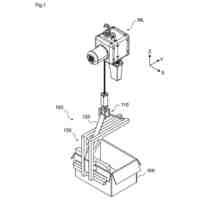
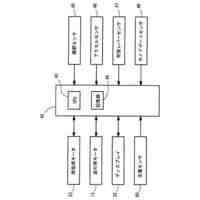
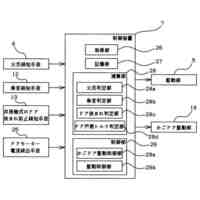
図2は、第1の実施形態に係る作業機械に搭載される駆動系の構成例を示す図である。
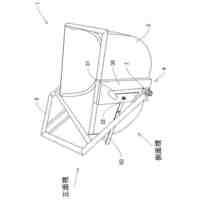
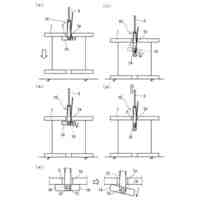
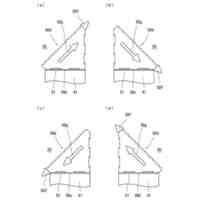
図3は、第1の実施形態に係る作業機械のアタッチメントがつり上げる搬送物の重量の算出に関するパラメータを説明する模式図である。
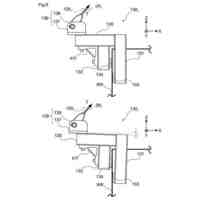
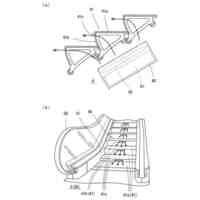
図4は、第1の実施形態に係る角度制御部によって角度を制御されたリフティングマグネットを例示した図である。
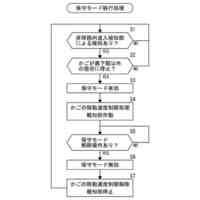
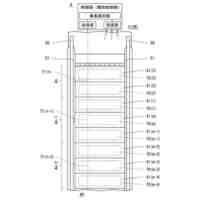
図5は、第1の実施形態に係る作業機械が搬送物の重心を記憶するまでの初期設定処理の流れの一例を示したフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照して説明する。また、以下で説明する実施形態は、発明を限定するものではなく例示であって、実施形態に記述される全ての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。なお、各図面において同一の又は対応する構成には同一の又は対応する符号を付し、説明を省略することがある。
【0010】
(作業機械の概要)
図1は、本実施形態に係る作業機械100の側面図である。作業機械100の下部走行体1には旋回機構2を介して上部旋回体3が搭載されている。上部旋回体3にはブーム4が取り付けられている。ブーム4の先端にはアーム5が取り付けられ、アーム5の先端にはエンドアタッチメント(作業具)としてのリフティングマグネット6が取り付けられている。ブーム4及びアーム5はアタッチメントの一例である作業アタッチメントを構成している。そして、ブーム4はブームシリンダ7(油圧シリンダの一例)で駆動され、アーム5はアームシリンダ8(油圧シリンダの一例)で駆動され、リフティングマグネット6はリフティングマグネットシリンダ9(油圧シリンダの一例)で駆動される。なお、本実施形態において、アタッチメントの先端に取り付けられ搬送物の搬送に用いることができる作業具(搬送機構)はリフティングマグネット6であるが、作業の種類によって、グラップル、解体用フォーク、チェーンソーを含むハーベスタ等の他の作業具が取り付けられてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
リフト装置
12か月前
ユニパルス株式会社
吊具
3か月前
ユニパルス株式会社
吊具
3か月前
個人
高低間移動補助装置
9か月前
個人
吊りバケット装置
5か月前
ユニパルス株式会社
吊具装置
9か月前
ユニパルス株式会社
吊具装置
9か月前
株式会社フジタ
昇降装置
7か月前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
22日前
株式会社豊田自動織機
産業車両
8か月前
株式会社豊田自動織機
産業車両
5か月前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
2か月前
株式会社豊田自動織機
荷役車両
1か月前
有限会社矢島製作所
ローダ
9か月前
株式会社アイセイ
搬送装置
6か月前
株式会社北川鉄工所
吊荷制御方法
2か月前
ユニパルス株式会社
物品昇降装置
8か月前
株式会社ノセ技研
バケット
5か月前
ユニパルス株式会社
荷役助力装置
8か月前
ユニパルス株式会社
荷役助力装置
17日前
ダイコー興産株式会社
引掛具
9か月前
大同特殊鋼株式会社
治具
1か月前
フジテック株式会社
エレベータ
3か月前
フジテック株式会社
エレベータ
9か月前
フジテック株式会社
エレベータ
3か月前
株式会社ニシキ
可変型吊り天秤
1日前
フジテック株式会社
エレベータ
2か月前
株式会社豊田自動織機
フォークリフト
7か月前
大和ハウス工業株式会社
可動架台
7か月前
フジテック株式会社
乗客コンベア
7か月前
フジテック株式会社
乗客コンベア
9か月前
フジテック株式会社
乗客コンベア
8か月前
フジテック株式会社
乗客コンベア
10か月前
フジテック株式会社
乗客コンベア
10か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ