TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025179461
公報種別
公開特許公報(A)
公開日
2025-12-10
出願番号
2024086222
出願日
2024-05-28
発明の名称
画像処理装置
出願人
株式会社SOKEN
,
トヨタ自動車株式会社
代理人
個人
主分類
G06T
7/70 20170101AFI20251203BHJP(計算;計数)
要約
【課題】対象物体の三次元位置情報を少ない計算量で取得する。
【解決手段】対象物体の底面輪郭に関する予め定められた第1情報を記憶する記憶部と、カメラによる前記対象物体の撮影画像から前記対象物体の底面輪郭に関する第2情報を取得し、前記第1情報と前記第2情報とに基づいて得られる、前記対象物体の底面中心の三次元位置情報を出力する演算部と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
対象物体の底面輪郭に関する予め定められた第1情報を記憶する記憶部と、
カメラによる前記対象物体の撮影画像から前記対象物体の底面輪郭に関する第2情報を取得し、前記第1情報と前記第2情報とに基づいて得られる、前記対象物体の底面中心の三次元位置情報を出力する演算部と、を有する、画像処理装置。
続きを表示(約 400 文字)
【請求項2】
前記第1情報、及び前記第2情報は、二次元座標を有する点群情報によって表現されている、請求項1に記載の画像処理装置。
【請求項3】
前記演算部は、前記対象物体の位置、姿勢及び移動速度のうちの少なくとも一つに関する過去情報を用いて、前記対象物体の底面中心の三次元位置情報を取得する、請求項1又は請求項2に記載の画像処理装置。
【請求項4】
前記演算部は、前記対象物体の底面領域よりも面積が大きい拡張領域に関する情報をさらに出力する、請求項1又は請求項2に記載の画像処理装置。
【請求項5】
前記拡張領域は、前記カメラが前記対象物体の撮影を開始してから前記演算部が前記撮影画像を入力するまでにかかる時間、並びに前記対象物体の移動方向への移動速度に応じて、前記対象物体の底面領域が前記移動方向に拡張された領域である、請求項4に記載の画像処理装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像処理装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば、特許文献1には、対象物体のシミュレーションモデルを用いて、複数種類の姿勢を区別する画像特徴を抽出し、カメラを用いて撮影した対象物体の画像から、対象物体の位置及び姿勢の情報を取得する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-121899号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術は、対象物体の三次元位置情報を取得するための計算量が多い点に改善の余地がある。
【課題を解決するための手段】
【0005】
上述した課題を解決するために、一実施形態に係る画像処理装置は、対象物体の底面輪郭に関する予め定められた第1情報を記憶する記憶部と、カメラによる前記対象物体の撮影画像から前記対象物体の底面輪郭に関する第2情報を取得し、前記第1情報と前記第2情報とに基づいて得られる、前記対象物体の底面中心の三次元位置情報を出力する演算部と、を有する。
【発明の効果】
【0006】
一実施形態に係る画像処理装置によれば、対象物体の三次元位置情報を少ない計算量で取得することができる。
【図面の簡単な説明】
【0007】
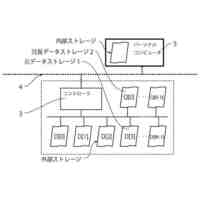
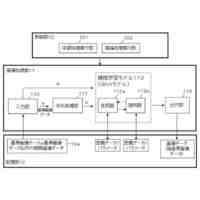
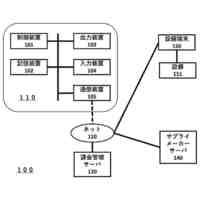
一実施形態に係る画像処理装置の構成を示すブロック図である。
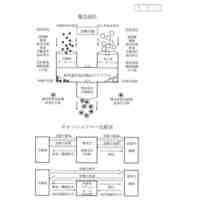
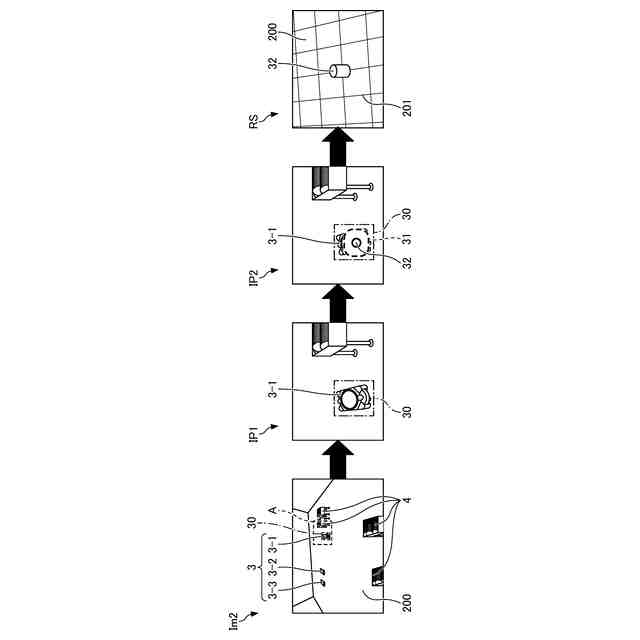
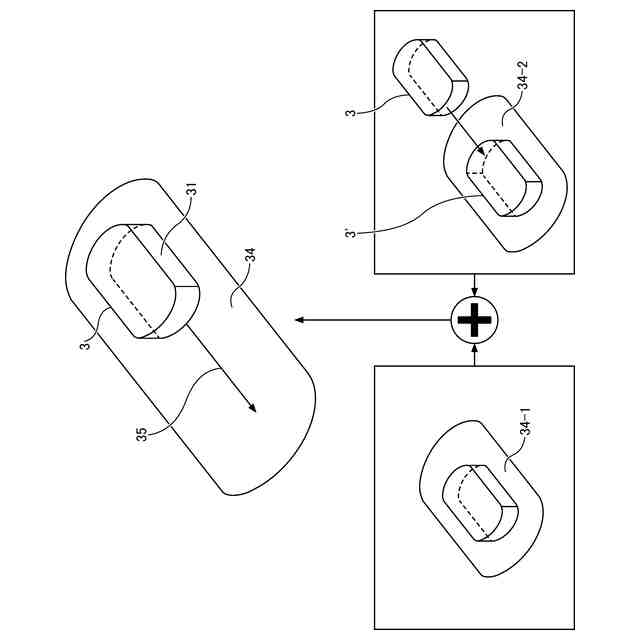
一実施形態に係る画像処理装置による対象物体の底面中心の三次元位置情報の取得処理を示す模式図である。
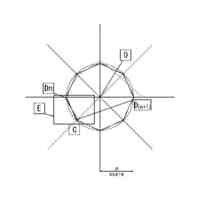
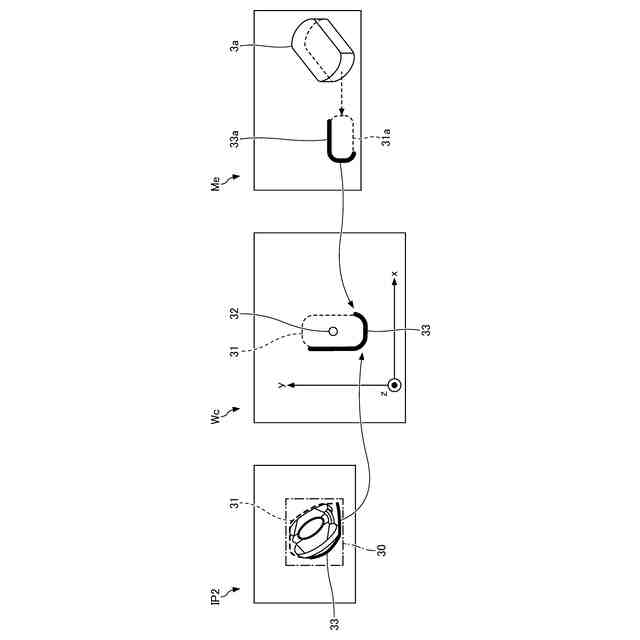
一実施形態に係る画像処理装置による底面輪郭に関する第1情報及び第2情報の照合処理を示す模式図である。
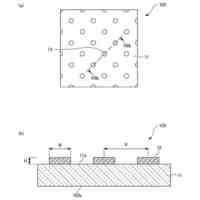
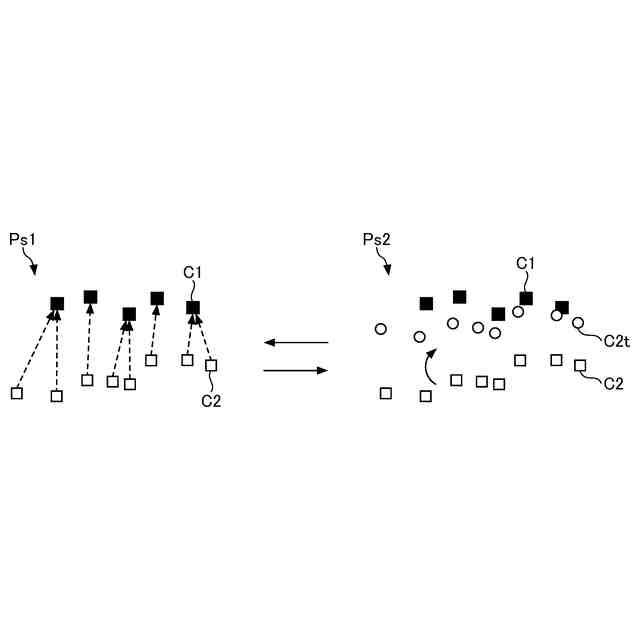
底面輪郭に関する第1情報及び第2情報を表す点群を示す模式図である。
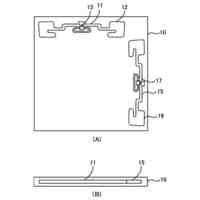
対象物体の底面領域よりも面積が大きい拡張領域を示す模式図である。
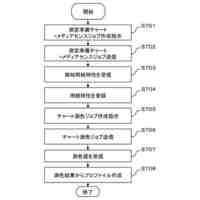
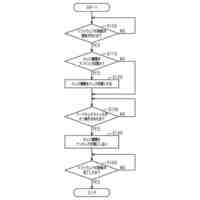
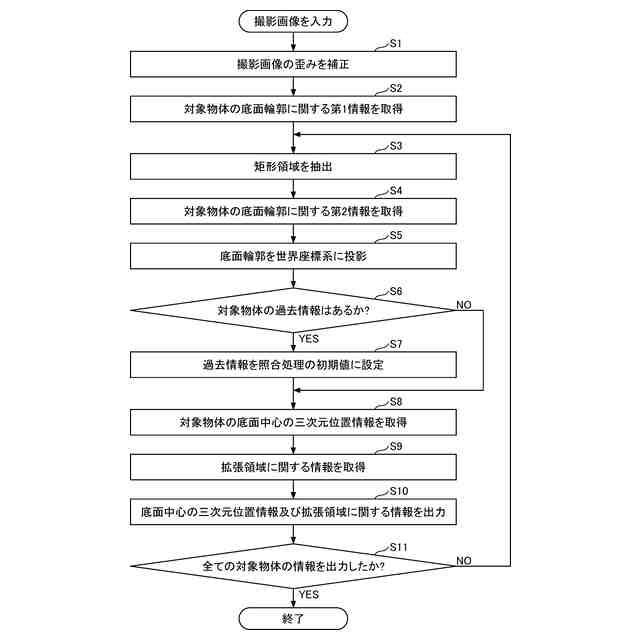
一実施形態に係る画像処理装置による処理を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、本発明の一実施形態について添付の図面を参照しながら説明する。なお、本明細書および図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複した説明を省略する。
【0009】
<一実施形態に係る画像処理装置の構成>
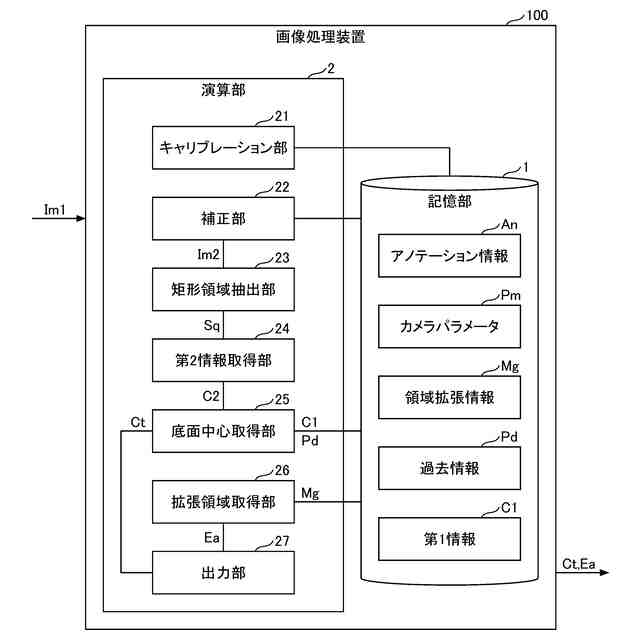
図1は、一実施形態に係る画像処理装置100の構成を示すブロック図である。図2は、画像処理装置100による対象物体3の底面中心32の三次元位置情報Ctの取得処理を示す模式図である。図3は、画像処理装置100による底面輪郭33に関する第1情報C1及び第2情報C2の照合処理を示す模式図である。図4は、底面輪郭33に関する第1情報C1及び第2情報C2を表す点群情報を示す模式図である。図5は、対象物体3の底面領域31よりも面積が大きい拡張領域34を示す模式図である。
【0010】
画像処理装置100は、カメラによる撮影画像Im1を用いて取得される対象物体3の三次元位置情報を出力する装置である。対象物体3は、工場又は倉庫等の床面上を移動するAGV(Automatic Guided Vehicle)、AMR(Autonomous Mobile Robot)、搬送車、フォークリフト等の移動体である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
職業自動販売機
27日前
個人
5掛けポイント
1か月前
個人
RFタグシート
1か月前
個人
ペルソナ認証方式
1か月前
個人
自動調理装置
1か月前
個人
情報処理装置
1か月前
個人
立体グラフの利用方法
6日前
個人
サービス情報提供システム
29日前
個人
インターネットの利用構造
1か月前
個人
データ復元システム
1日前
個人
タッチパネル操作指代替具
1か月前
NISSHA株式会社
入力装置
7日前
個人
携帯端末障害問合せシステム
1か月前
個人
学習用データ生成装置
8日前
個人
スケジュール調整プログラム
1か月前
個人
エリアガイドナビAIシステム
1か月前
株式会社ケアコム
項目選択装置
1か月前
キヤノン株式会社
情報処理装置
21日前
株式会社ワコム
電子ペン
1か月前
キヤノン株式会社
情報処理装置
21日前
トヨタ自動車株式会社
通知装置
1か月前
キヤノン株式会社
情報処理装置
1か月前
キヤノン株式会社
印刷システム
1か月前
株式会社ワコム
電子ペン
1か月前
キヤノン株式会社
画像認識装置
21日前
キラル株式会社
顧客体験提供システム
9日前
株式会社ケアコム
項目選択装置
1か月前
個人
請求金額算出システム
13日前
トヨタ自動車株式会社
車両
1か月前
太陽誘電株式会社
表示装置
1か月前
株式会社アジラ
行動推定システム
21日前
大同大學
スーパーアプリ構築方法
21日前
キヤノン電子株式会社
情報処理システム
6日前
株式会社ITP
仮想展示システム
15日前
株式会社ゼロワン
ケア支援システム
1か月前
PRONI株式会社
受発注支援装置
27日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ