TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025174372
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024080696
出願日
2024-05-17
発明の名称
投影システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G06T
7/80 20170101AFI20251120BHJP(計算;計数)
要約
【課題】リアル対象空間における人物をバーチャル対象空間に投影する際の投影精度を向上させること。
【解決手段】リアルカメラはリアル対象空間に設置され、バーチャルカメラはリアル対象空間を表現したバーチャル対象空間に設置される。投影システムは、リアルカメラから見たリアル対象空間がバーチャル対象空間と整合するようにリアルカメラのカメラパラメータを決定するカメラキャリブレーション・整合処理を実行する。投影システムは、リアルカメラによって撮影される画像に映っているリアル人物を検出し、リアル人物の3次元姿勢を推定する。投影システムは、リアル人物位置に相当するバーチャル対象空間内のバーチャル人物位置を推定し、3次元姿勢を有しリアル人物を表現したバーチャル人物をバーチャル対象空間内のバーチャル人物位置に投影する。
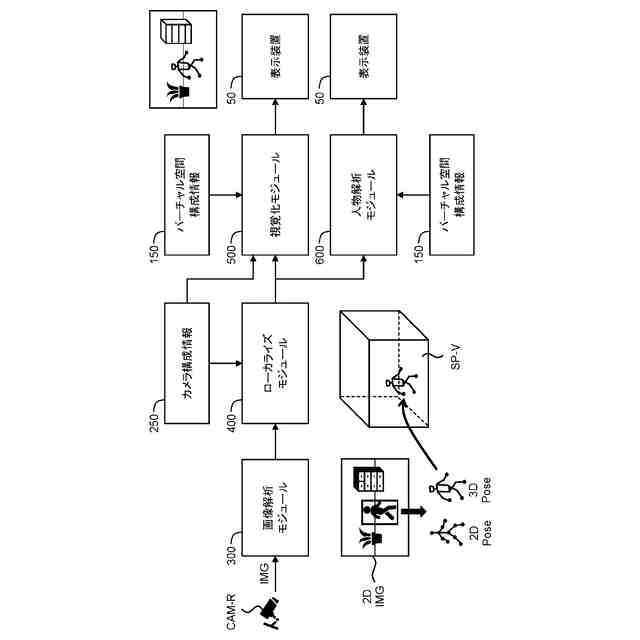
【選択図】図3
特許請求の範囲
【請求項1】
1又は複数のプロセッサを備え、
リアルカメラはリアル対象空間に設置され、バーチャルカメラは前記リアル対象空間を表現したバーチャル対象空間に設置され、
前記1又は複数のプロセッサは、
前記リアルカメラから見た前記リアル対象空間が前記バーチャル対象空間と整合するように前記リアルカメラのカメラパラメータを決定するカメラキャリブレーション・整合処理を実行することによって、前記カメラパラメータを示すカメラ構成情報を取得し、
前記リアルカメラによって撮影される画像に映っているリアル人物を検出し、
前記画像に基づいて前記リアル人物の3次元姿勢を推定し、
前記カメラ構成情報に基づいて、前記リアル対象空間において前記リアル人物が存在するリアル人物位置に相当する前記バーチャル対象空間内のバーチャル人物位置を推定し、
前記3次元姿勢を有し前記リアル人物を表現したバーチャル人物を前記バーチャル対象空間内の前記バーチャル人物位置に投影する
ように構成された
投影システム。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の投影システムであって、
前記カメラキャリブレーション・整合処理は、
前記リアルカメラによって撮影され、且つ、前記リアル対象空間内の所定のリアル位置に置かれたリアルマーカーが映っているクエリ画像を取得することと、
前記クエリ画像における前記リアルマーカーのn点(nは2以上の整数)の2次元座標を取得することと、
前記バーチャル対象空間内のバーチャルマーカーのn点の3次元座標を取得することと、ここで、前記バーチャルマーカーは、前記リアル対象空間内の前記所定のリアル位置に相当する前記バーチャル対象空間内の所定のバーチャル位置に置かれ、前記リアルマーカーの前記n点は前記バーチャルマーカーの前記n点に相当し、
前記リアルマーカーの前記n点の前記2次元座標と前記バーチャルマーカーの前記n点の前記3次元座標に基づいてPnP(Perspective-n-Point)問題を解くことによって、前記カメラパラメータを決定することと
を含む
投影システム。
【請求項3】
請求項1に記載の投影システムであって、
前記カメラキャリブレーション・整合処理は、
前記リアル対象空間において撮影された一群の画像にSfM(Structure from Motion)を適用することによって、前記リアル対象空間の3次元環境を表す点群を取得することと、
前記リアルカメラによって撮影されたクエリ画像を取得することと、
前記SfMにおいて得られた前記点群の特徴量群と前記クエリ画像から抽出されたクエリ特徴量との特徴量マッチングを行うことによって、前記点群と前記クエリ画像との間で共通の対応点を見つけ出すことと、
前記対応点に基づいて前記リアルカメラの仮カメラパラメータを決定することと
を含む
投影システム。
【請求項4】
請求項3に記載の投影システムであって、
前記リアルカメラの前記仮カメラパラメータを決定することは、
前記クエリ画像における前記対応点の2次元座標を取得することと、
前記点群における前記対応点の3次元座標を取得することと、
前記対応点の前記2次元座標と前記対応点の前記3次元座標に基づいてPnP(Perspective-n-Point)問題を解くことによって、前記リアルカメラの前記仮カメラパラメータを決定することと
を含む
投影システム。
【請求項5】
請求項3又は4に記載の投影システムであって、
前記カメラキャリブレーション・整合処理は、更に、
前記リアル対象空間において撮影された前記一群の画像に基づいて前記リアル対象空間の前記3次元環境を再構成することと、
前記バーチャル対象空間の3次元環境を表現する3次元モデルを取得することと、
前記リアル対象空間の前記3次元環境と前記バーチャル対象空間の前記3次元環境とを整合させることにより得られる、前記リアル対象空間と前記バーチャル対象空間との間の座標変換のための情報を取得することと、
前記座標変換を適用することによって前記リアルカメラの前記仮カメラパラメータを補正して、前記リアルカメラの前記カメラパラメータを決定することと
を含む
投影システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、リアル対象空間における人物をバーチャル対象空間に投影する技術に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1は、関節位置取得装置を開示している。関節位置取得装置は、距離画像センサとカメラを備える。関節位置取得装置は、距離画像センサにより得られる距離画像に基づいてターゲットの3次元関節位置を推定し、カメラにより得られるRGB画像に基づいてターゲットの2次元関節位置を推定する。そして、関節位置取得装置は、推定された2次元関節位置とカメラ光軸を用いて、3次元関節位置を補正する。
【0003】
その他の技術として、特許文献2及び特許文献3が知られている。
【先行技術文献】
【特許文献】
【0004】
特開2022-061910号公報
特開2017-157208号公報
特開2021-105887号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
リアル対象空間に設置されたリアルカメラによって撮影される画像に映っている人物を検出し、その人物をリアル対象空間を表現したバーチャル対象空間に投影する技術について考える。人物の位置推定の精度が低いと、投影精度も低くなり、投影結果に違和感が生じる。
【課題を解決するための手段】
【0006】
本開示の1つの観点は、投影システムに関する。
投影システムは、1又は複数のプロセッサを備える。
リアルカメラはリアル対象空間に設置され、バーチャルカメラはリアル対象空間を表現したバーチャル対象空間に設置される。
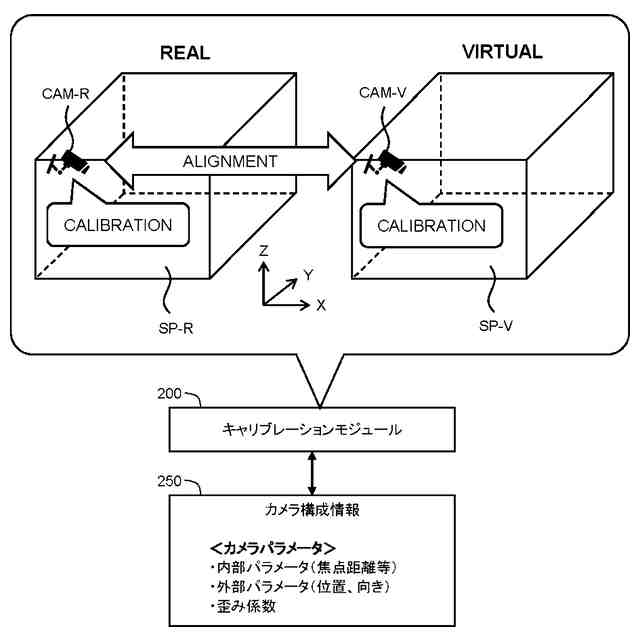
1又は複数のプロセッサは、リアルカメラから見たリアル対象空間がバーチャル対象空間と整合するようにリアルカメラのカメラパラメータを決定するカメラキャリブレーション・整合処理を実行することによって、カメラパラメータを示すカメラ構成情報を取得する。
1又は複数のプロセッサは、リアルカメラによって撮影される画像に映っているリアル人物を検出する。
1又は複数のプロセッサは、画像に基づいてリアル人物の3次元姿勢を推定する。
1又は複数のプロセッサは、カメラ構成情報に基づいて、リアル対象空間においてリアル人物が存在するリアル人物位置に相当するバーチャル対象空間内のバーチャル人物位置を推定する。
1又は複数のプロセッサは、3次元姿勢を有しリアル人物を表現したバーチャル人物をバーチャル対象空間内のバーチャル人物位置に投影する。
【発明の効果】
【0007】
本開示によれば、カメラキャリブレーション・整合処理が行われるため、人物位置推定の精度が向上する。その結果、バーチャル対象空間へのバーチャル人物の投影の精度も向上し、投影結果に対する違和感が抑制される。
【図面の簡単な説明】
【0008】
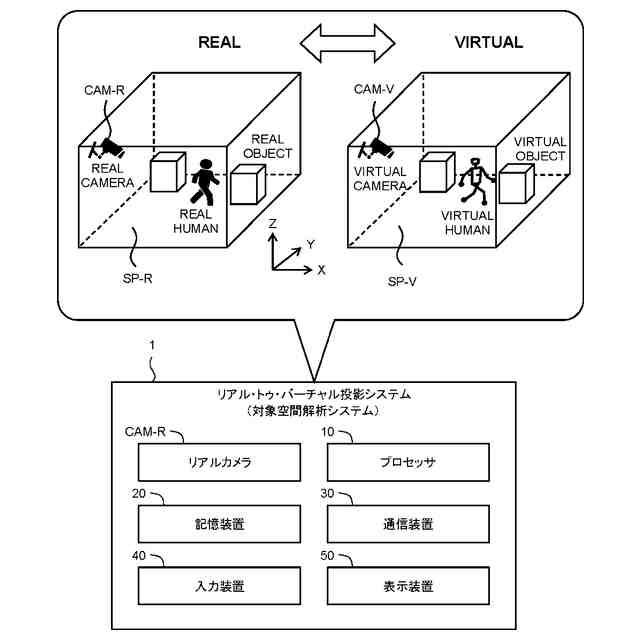
リアル・トゥ・バーチャル投影システムの概要を説明するための概念図である。
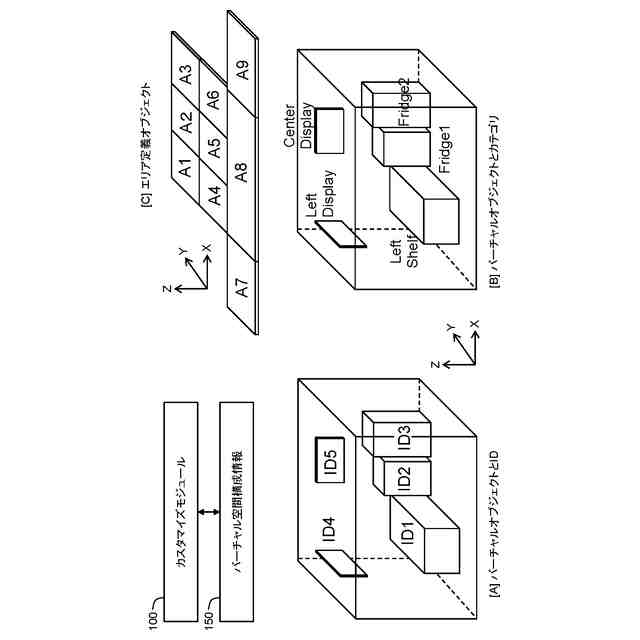
バーチャル空間構成情報を説明するための概念図である。
カメラ構成情報を説明するための概念図である。
視覚化機能と解析機能の概要を説明するための概念図である。
画像解析モジュールの例を説明するための概念図である。
ローカライズ処理の精度を向上させる手法を説明するための概念図である。
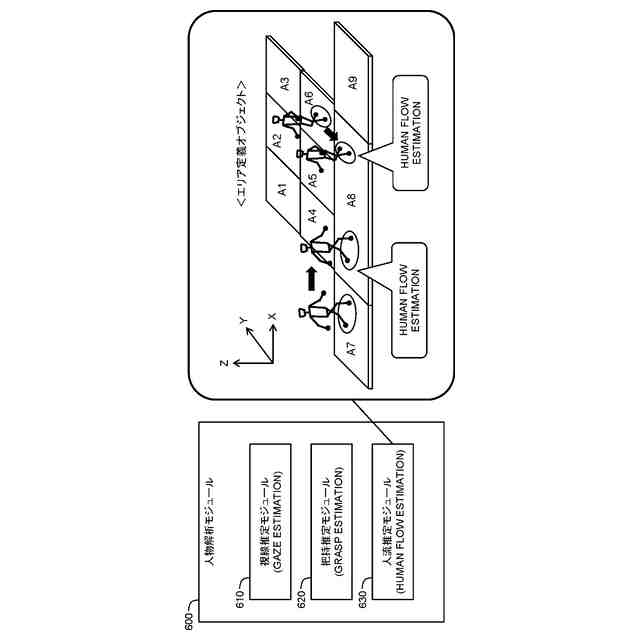
視線推定処理の例を説明するための概念図である。
把持推定処理の例を説明するための概念図である。
人流推定処理の例を説明するための概念図である。
カメラキャリブレーション・整合処理の第1の例を説明するための概念図である。
カメラキャリブレーション・整合処理の第2の例を説明するための概念図である。
カメラキャリブレーション・整合処理の第2の例を説明するための概念図である。
【発明を実施するための形態】
【0009】
添付図面を参照して、本開示の実施の形態を説明する。
【0010】
1.リアル・トゥ・バーチャル投影システムの概要
図1は、リアル・トゥ・バーチャル投影システム(real-to-virtual projection system)1の概要を説明するための概念図である。リアル対象空間SP-Rは、実在する3次元空間であり、各種解析の対象となる3次元空間である。バーチャル対象空間SP-Vは、リアル対象空間SP-Rを表現した仮想的な3次元空間である。言い換えれば、バーチャル対象空間SP-Vは、リアル対象空間SP-Rを模した仮想的な3次元空間である。リアル対象空間SP-Rとバーチャル対象空間SP-Vは、同じ世界座標系(X,Y,Z)で表される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
29日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
治具
1か月前
トヨタ自動車株式会社
電池
14日前
トヨタ自動車株式会社
車両
29日前
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車体
22日前
トヨタ自動車株式会社
配管
9日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
電池
23日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
電動車
8日前
トヨタ自動車株式会社
ロータ
9日前
トヨタ自動車株式会社
蓄電池
22日前
トヨタ自動車株式会社
モータ
21日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
モータ
1か月前
トヨタ自動車株式会社
サーバ
1か月前
トヨタ自動車株式会社
エンジン
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
蓄電装置
29日前
トヨタ自動車株式会社
蓄電装置
29日前
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
処理装置
今日
トヨタ自動車株式会社
電源装置
1か月前
トヨタ自動車株式会社
監視装置
14日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
蓄電装置
今日
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ