TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025171079
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024076065
出願日
2024-05-08
発明の名称
物体検知装置
出願人
酒井重工業株式会社
代理人
弁理士法人磯野国際特許商標事務所
主分類
G01S
17/931 20200101AFI20251113BHJP(測定;試験)
要約
【課題】物体の検知精度を向上することが可能な物体検知装置を提供する。
【解決手段】物体検知装置20は、受光部22の画素ごとに、発光部21から照射された投射光の反射位置までの距離を算出する距離算出部23aと、画素ごとの受光強度及び距離の分布に基づいて、画素の受光強度が実像からのものである可能性を示すレベルを設定するレベル設定部23cと、画素ごとに算出された距離に基づいて、物体を識別する物体識別部23dと、レベルに基づいて、識別された物体が実像であるか否かを判定する実像判定部23eと、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
受光部の画素ごとに、発光部から照射された投射光の反射位置までの距離を算出する距離算出部と、
前記画素ごとの受光強度及び前記距離の分布に基づいて、前記画素の前記受光強度が実像からのものである可能性を示すレベルを設定するレベル設定部と、
前記画素ごとに算出された前記距離に基づいて、物体を識別する物体識別部と、
前記レベルに基づいて、識別された前記物体が実像であるか否かを判定する実像判定部と、
を備えることを特徴とする物体検知装置。
続きを表示(約 990 文字)
【請求項2】
前記物体識別部は、前記レベルの高い側と低い側とを積算比較し、高い側の積算値が低い側の積算値よりも大きくなる最大の前記レベルを前記物体の実像レベルとして採用し、
前記実像判定部は、採用された前記物体の前記実像レベルが第一の閾値以上である場合には、前記物体は実像であると判定し、採用された前記物体の前記実像レベルが前記第一の閾値未満である場合には、前記物体は虚像であると判定する
ことを特徴とする請求項1に記載の物体検知装置。
【請求項3】
前記実像判定部は、
採用された前記物体の前記実像レベルが前記第一の閾値未満であり前記第一の閾値よりも小さい第二の閾値以上である場合が所定フレーム続いた場合には、前記物体は実像であると判定し、採用された前記物体の前記実像レベルが前記第一の閾値未満かつ前記第二の閾値以上である場合が前記所定フレーム続かなかった場合には、前記物体は虚像であると判定する
ことを特徴とする請求項2に記載の物体検知装置。
【請求項4】
前記レベル設定部は、前記距離に基づいて、前記画素ごとに前記反射位置が路面であるか前記路面上に位置する物体であるかを判定し、前記路面上に位置する前記物体に対して前記レベルを設定する
ことを特徴とする請求項1に記載の物体検知装置。
【請求項5】
前記レベル設定部は、前記発光部及び前記受光部の対象エリアを複数に分割し、分割されたエリアごとに前記反射位置が前記路面であるか前記路面上に位置する物体であるかを判定し、前記反射位置が前記路面であると判定された前記画素が少ない前記エリアを、前記反射位置が前記路面であると判定された前記画素が多い前記エリアに基づいて補間する
ことを特徴とする請求項4に記載の物体検知装置。
【請求項6】
前記物体識別部は、ラスタスキャン法を用いて前記物体を識別する
ことを特徴とする請求項1に記載の物体検知装置。
【請求項7】
建設車両に配置される請求項1に記載の物体検知装置であって、
前記物体が実像であると判定された場合に、前記実像の前記距離に基づいてブレーキ作動の必要性を判定するブレーキ判定部を備える、
ことを特徴とする物体検知装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、転圧ローラ等の建設車両において周辺の物体を検知する技術に関する。
続きを表示(約 3,800 文字)
【背景技術】
【0002】
例えば、特許文献1には、建設車両としての転圧ローラの後方に存在する障害物を検知する障害物検知装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-12063号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の障害物検知装置は、湯気、土煙等からのエコーをノイズとして除去した後に、障害物が存在するか否かを判定する。かかる判定手法では、路面及び障害物の色、素材等の組み合わせによっては、検知精度が低下するおそれがある。例えば、コンクリート等の明るい路面、反射しにくい及び/又は暗色系の障害物等の場合には、検知精度が低下する。
【0005】
本発明は、前記した事情に鑑みて創案されたものであり、物体の検知精度を向上することが可能な物体検知装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
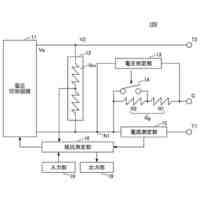
本発明の物体検知装置は、受光部の画素ごとに、発光部から照射された投射光の反射位置までの距離を算出する距離算出部と、前記画素ごとの受光強度及び前記距離の分布に基づいて、前記画素の前記受光強度が実像からのものである可能性を示すレベルを設定するレベル設定部と、前記画素ごとに算出された前記距離に基づいて、物体を識別する物体識別部と、前記レベルに基づいて、識別された前記物体が実像であるか否かを判定する実像判定部と、を備える。
【発明の効果】
【0007】
本発明によれば、物体の検知精度を向上することができる。
【図面の簡単な説明】
【0008】
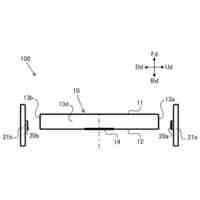
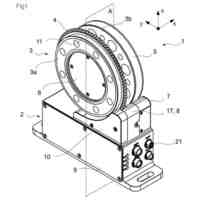
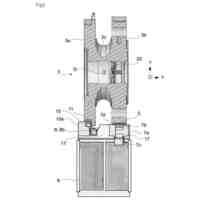
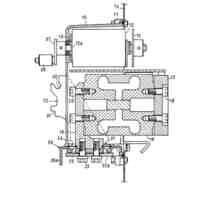
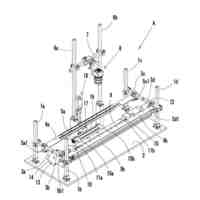
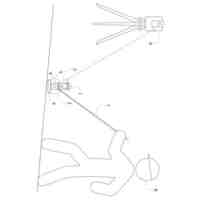
本発明の実施形態に係る物体検知システムが適用された転圧ローラの側面図である。
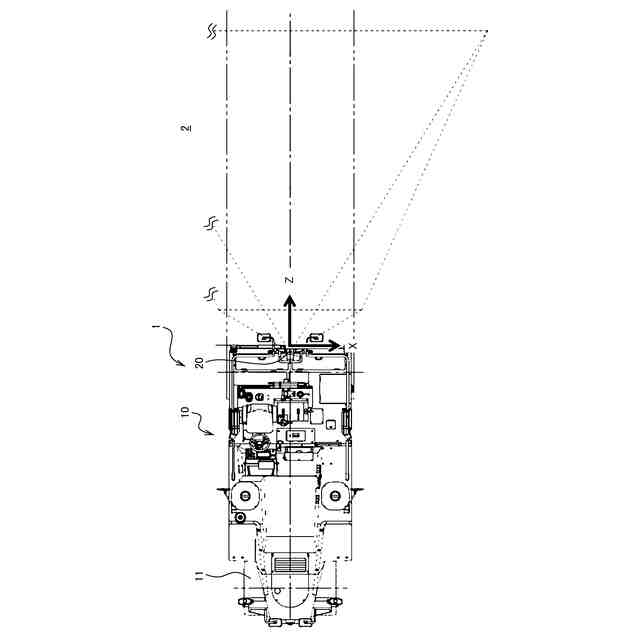
本発明の実施形態に係る物体検知システムが適用された転圧ローラの平面図である。
本発明の実施形態に係る物体検知システムを模式的に示すブロック図である。
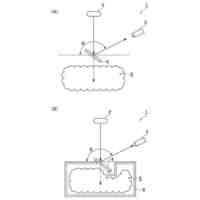
(a)は物体検知装置による測定対象の路面及び物体を撮像した画像、(b)は画素ごとの距離を模式的に示す画像、(c)は画素ごとの受光強度を模式的に示す画像である。
(a)はXZ平面における画素の座標の分布を模式的に示すグラフ、(b)は、XY平面における画素の座標の分布を模式的に示すグラフ、(c)はYZ平面における画素の座標の分布を模式的に示すグラフ、(d)は画素の距離及び受光強度の関係(分布)を模式的に示すグラフ(部分拡大図)である。
(a)は前進時の転圧ローラを模式的に示す側面図、(b1)は前進かつ減速時の転圧ローラを模式的に示す側面図、(b2)は前進かつ減速時の物体検知装置による1番目のエコーの測定例を模式的に示すグラフ、(b3)は前進かつ減速時の物体検知装置による1番目のエコーの測定例を模式的に示す画像、(c1)は前後進の切替時の転圧ローラを模式的に示す側面図、(c2)は前後進の切替時の物体検知装置による1番目のエコーの測定例を模式的に示すグラフ、(c3)は前後進の切替時の物体検知装置による1番目のエコーの測定例を模式的に示す画像、(d1)は後進かつ加速時の転圧ローラを模式的に示す側面図、(d2)は後進かつ加速時の物体検知装置による1番目のエコーの測定例を模式的に示すグラフ、(d3)は後進かつ加速時の物体検知装置による1番目のエコーの測定例を模式的に示す画像である。
(a)は転圧ローラの後方に作業者及び湯気が存在する状態を撮像した画像、(b)はXZ平面における画素の座標の分布を模式的に示すグラフ、(c)は、XY平面における画素の座標の分布を模式的に示すグラフ、(d)はYZ平面における画素の座標の分布を模式的に示すグラフである。
(a)はXZ平面における路面に対応する画素の座標の分布を模式的に示すグラフ、(b)はXZ平面における路面に対応する画素の座標の分布を模式的に示すグラフであって左右の画素に対応する点群を除去したグラフである。
転圧ローラの後方の路面を模式的に示す平面図であり、路面を示すデータを補間する手法を説明するための図である。
(a)はXY平面における路面に対応する画素の座標の分布を模式的に示すグラフ、(b)はXZ平面における路面に対応する画素の座標の分布を模式的に示すグラフである。
画素ごとの距離の対数及び受光強度の対数の関係を模式的に示すグラフである。
(a)は転圧ローラの後方に作業者及び湯気が存在する状態を撮像した画像、(b)は物体検知装置によって測定された画素ごとの距離を模式的に示す画像である。
(a)はXY平面における路面に対応する画素の座標の分布を模式的に示すグラフ、(b)はYZ平面における路面に対応する画素の座標の分布を模式的に示すグラフ、(c)は画素ごとの距離の対数及び受光強度の対数の関係を模式的に示すグラフである。
(a)は転圧ローラの後方に作業者及び物体が存在する状態を撮像した画像、(b)は画素ごとの距離を模式的に示す画像、(c)は画素ごとの受光強度を模式的に示す画像、(d)はラスタスキャン法を模式的に示す画像、(e)はラスタスキャン法によって識別された作業者及び物体を模式的に示す画像である。
(a)はXZ平面における画素の座標の分布を模式的に示すグラフ、(b)はXY平面における画素の座標の分布を模式的に示すグラフ、(c)はYZ平面における画素の座標の分布を模式的に示すグラフ、(d)は画素ごとのレベルを模式的に示す画像、(e)は(d)の部分拡大図である。
(a)は識別された物体ごとの画素のレベルの分布を模式的に示すグラフ、(b)は識別された物体ごとの画素のレベルの分布及び物体の実像レベルを模式的に示す表である。
(a)は転圧ローラの後方に作業者及び湯気が存在する状態を撮像した画像、(b)は画素ごとの距離を模式的に示す画像、(c)は画素ごとの受光強度を模式的に示す画像、(d)はラスタスキャン法によって識別された作業者及び物体を模式的に示す画像である。
(a)はXY平面における画素の座標の分布を模式的に示すグラフ、(b)はYZ平面における画素の座標の分布を模式的に示すグラフ、(c)は画素ごとのレベルを模式的に示す画像である。
(a)は画素ごとのレベルを模式的に示す画像であって、レベルが0の画素を除去した状態を模式的に示す画像、(b)は識別された物体ごとの画素のレベルの分布を模式的に示すグラフ、(c)は識別された物体ごとの画素のレベルの分布及び物体の実像レベルを模式的に示す表である。
緊急ブレーキを作動させるための車速及び物体までの距離の関係性を表すブレーキラインを示すグラフである。
本発明の実施形態に係る物体検知装置の動作例を説明するためのフローチャートである。
本発明の実施形態に係る物体検知装置の動作例を説明するためのフローチャートであり、受光強度のレベル設定の動作例を説明するためのフローチャートである。
本発明の実施形態に係る物体検知装置の動作例を説明するためのフローチャートであり、物体識別の動作例を説明するためのフローチャートである。
本発明の実施形態に係る物体検知装置の動作例を説明するためのフローチャートであり、実像判定の動作例を説明するためのフローチャートである。
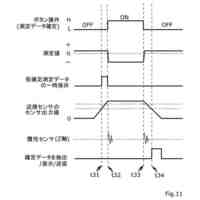
(a)は転圧ローラの後方に作業者及び湯気が存在する状態を撮像した画像、(b)は検知距離を模式的に示すグラフ、(c)は検知開始距離の例を示す表である。
(a)(b)(c)(d)は検知距離を模式的に示すグラフ、(e)は検知開始距離の例を示す表である。
(a1)(b1)(c1)は転圧ローラの後方に作業者が存在する状態を撮像した画像、(a2)(b2)(c2)は検知距離を模式的に示すグラフである。
(a)は転圧ローラの後方に作業者及び湯気が存在する状態を撮像した画像、(b)は画素ごとの距離を示す画像、(c)は検知距離を模式的に示すグラフである。
(a)は検知距離を模式的に示すグラフ、(b1)(c1)(d1)は転圧ローラの後方に作業者が存在する状態を撮像した画像、(b2)(c2)(d2)は検知距離を模式的に示すグラフである。
【発明を実施するための形態】
【0009】
本発明の実施形態に係る物体検知装置について、当該物体検知装置を建設車両としての転圧ローラに適用した場合を例にとり、図面を参照して詳細に説明する。同一の構成には同一の符号を付し、重複する説明を省略する。各図において、上下、左右、前後といった方向を表す表現は、転圧ローラを基準とする。
【0010】
図1及び図2に示すように、本発明の実施形態に係る物体検知システム1は、転圧ローラ10と、転圧ローラ10に配置された物体検知装置20と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
視触覚センサ
3日前
日本精機株式会社
検出装置
1か月前
個人
採尿及び採便具
1か月前
個人
計量機能付き容器
28日前
個人
高精度同時多点測定装置
1か月前
日本精機株式会社
発光表示装置
11日前
株式会社ミツトヨ
測定器
1か月前
株式会社カクマル
境界杭
18日前
甲神電機株式会社
電流検出装置
1か月前
ユニパルス株式会社
トルク変換器
3日前
ユニパルス株式会社
トルク変換器
3日前
株式会社トプコン
測量装置
10日前
ユニパルス株式会社
トルク変換器
3日前
アズビル株式会社
電磁流量計
1か月前
大成建設株式会社
風洞実験装置
28日前
ローム株式会社
半導体装置
1か月前
日本信号株式会社
距離画像センサ
1か月前
ローム株式会社
半導体装置
1か月前
双庸電子株式会社
誤配線検査装置
1か月前
個人
システム、装置及び実験方法
1か月前
日本特殊陶業株式会社
ガスセンサ
3日前
日本特殊陶業株式会社
ガスセンサ
26日前
大和製衡株式会社
組合せ計量装置
1か月前
日本特殊陶業株式会社
ガスセンサ
10日前
大和製衡株式会社
組合せ計量装置
1か月前
愛知時計電機株式会社
ガスメータ
1か月前
個人
非接触による電磁パルスの測定方法
1か月前
日本特殊陶業株式会社
ガスセンサ
4日前
愛知電機株式会社
軸部材の外観検査装置
1か月前
個人
計量具及び計量機能付き容器
28日前
日置電機株式会社
絶縁抵抗測定装置
3日前
トヨタ自動車株式会社
測定システム
1か月前
日本特殊陶業株式会社
センサ
12日前
日本特殊陶業株式会社
センサ
1か月前
本陣水越株式会社
車載式計測標的物
5日前
個人
液位検視及び品質監視システム
26日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ