TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025170562
公報種別
公開特許公報(A)
公開日
2025-11-19
出願番号
2024075236
出願日
2024-05-07
発明の名称
遠隔走行制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
50/14 20200101AFI20251112BHJP(車両一般)
要約
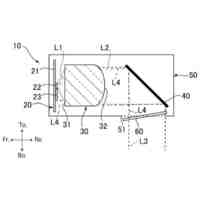
【課題】ユーザの車両の目視を阻害する阻害物体が存在する場合であっても接触可能性が高まることを防止できる遠隔走行制御装置を提供する。
【解決手段】遠隔走行制御装置は、車外のユーザが操作する遠隔操作装置からの走行指示に基いて車両を目標スペースまで走行させる遠隔走行制御を実行する。遠隔走行制御装置は、遠隔操作装置と車両との間にユーザが車両を目視することを阻害する阻害物体が存在する場合、阻害物体を存在する旨をユーザに知らせるための報知制御、及び、遠隔走行制御の上限速度を阻害物体が存在しない場合よりも低く制限する低速制御の少なくとも一方を阻害時制御として実行する。
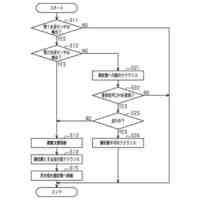
【選択図】 図3
特許請求の範囲
【請求項1】
車外のユーザが操作する遠隔操作装置からの走行指示に基いて車両を目標スペースまで走行させる遠隔走行制御を実行する遠隔走行制御装置において、
前記遠隔走行制御装置は、前記遠隔操作装置と前記車両との間に前記ユーザが前記車両を目視することを阻害する阻害物体が存在する場合、前記阻害物体を存在する旨を前記ユーザに知らせるための報知制御、及び、前記遠隔走行制御の上限速度を前記阻害物体が存在しない場合よりも低く制限する低速制御の少なくとも一方を阻害時制御として実行するように構成された、
遠隔走行制御装置。
続きを表示(約 790 文字)
【請求項2】
請求項1に記載の遠隔走行制御装置において、
前記遠隔走行制御装置は、前記阻害物体が移動物体か静止物体かによって、前記阻害時制御の制御態様を変更するように構成された、
遠隔走行制御装置。
【請求項3】
請求項2に記載の遠隔走行制御装置において、
前記遠隔走行制御装置は、
前記阻害時制御として前記報知制御を実行する場合において、前記阻害物体が前記静止物体であるとき、前記阻害物体が前記移動物体である場合よりも、前記報知制御の報知態様を強め、
前記阻害時制御として前記低速制御を実行する場合において、前記阻害物体が前記静止物体であるとき、前記阻害物体が前記移動物体である場合よりも、前記低速制御の前記上限速度を低くする、
ように構成された、遠隔走行制御装置。
【請求項4】
請求項1に記載の遠隔走行制御装置において、
前記阻害時制御として前記報知制御を実行する場合において、前記阻害物体が存在している存在時間が長いほど、前記報知制御の報知態様を強め、
前記阻害時制御として前記報知制御を実行する場合において、前記存在時間が長いほど、前記低速制御の前記上限速度を低くする、
ように構成された、遠隔走行制御装置。
【請求項5】
請求項1乃至請求項4の何れか一つに記載の遠隔走行制御装置において、
前記遠隔操作装置はスマートフォンであり、
前記遠隔走行制御装置は、前記遠隔操作装置を振動させる振動制御、前記遠隔操作装置に発音させる発音制御、及び、前記遠隔操作装置に前記阻害物体を存在する旨を前記ユーザに知らせるための報知画面を表示させる表示制御の少なくとも一つを、前記報知制御として実行するように構成された、
遠隔走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車外にいるユーザが操作する遠隔操作装置からの走行指示に基いて車両を目標スペースまで走行させる遠隔走行制御を実行する遠隔走行制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来から、遠隔走行制御を実行する遠隔走行制御装置が知られている。例えば、特許文献1に記載の遠隔走行制御装置(以下、「従来装置」と称呼する。)は、車両の比較的近距離に位置するユーザが遠隔操作装置を操作することにより、車両を駐車又は出庫させる遠隔走行制御を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2019-109616号公報
【発明の概要】
【0004】
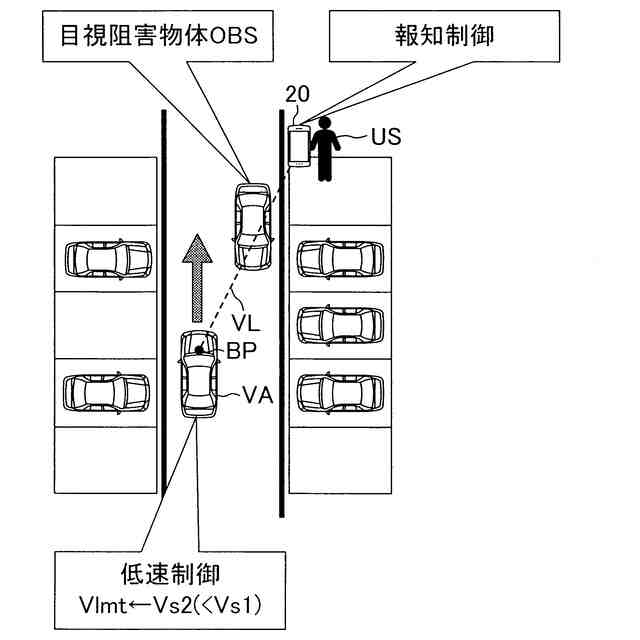
遠隔操作制御の実行中には、ユーザは車両を目視して車両を監視する必要がある。ユーザと車両との間にユーザの目視を阻害する阻害物体が存在する場合、ユーザは車両を目視できない可能性が高まる。ユーザが車両を監視できない状況下での「車両が他の物体と接触する接触可能性」はユーザが車両を監視している状況下での接触可能性よりも高くなる。
【0005】
しかしながら、従来装置は、阻害物体が存在する場合に特別な制御を実行していないため、阻害物体が存在する場合の接触可能性が高まる。
【0006】
本発明は前述した課題に対処するためになされたものである。即ち、本発明の目的の一つは、阻害物体が存在する場合であっても接触可能性が高まることを防止できる遠隔走行制御装置を提供することにある。
【0007】
本発明の遠隔走行制御装置(以下、「本発明装置」と称呼する。)は、 車外のユーザが操作する遠隔操作装置(20)からの走行指示に基いて車両(VA)を目標スペースまで走行させる遠隔走行制御を実行する。
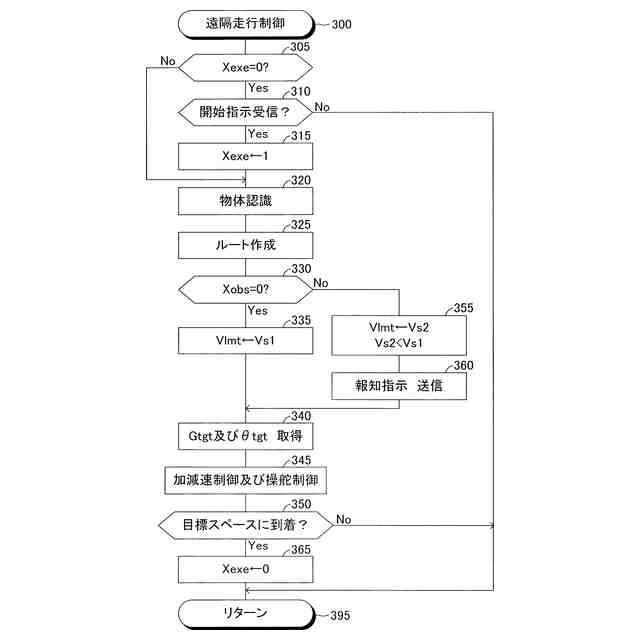
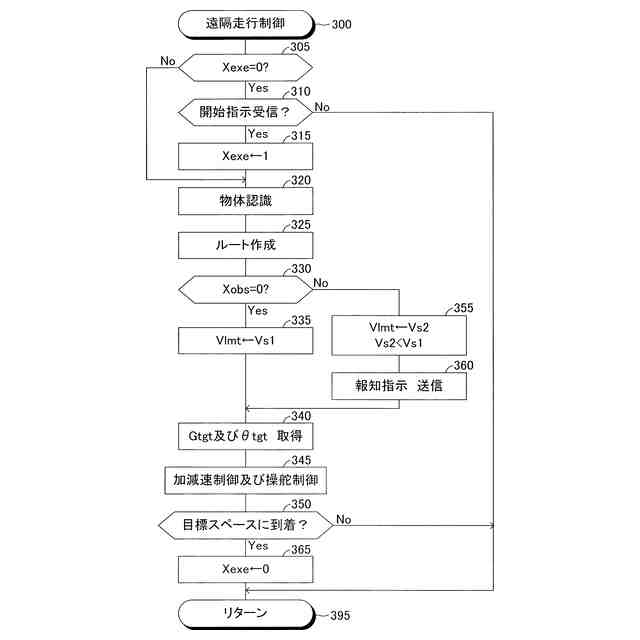
前記遠隔走行制御装置は、前記遠隔操作装置と前記車両との間に前記ユーザが前記車両を目視することを阻害する阻害物体(OBS)が存在する場合(ステップ330「No」)、前記阻害物体を存在する旨を前記ユーザに知らせるための報知制御(ステップ360)、及び、前記遠隔走行制御の上限速度を前記阻害物体が存在しない場合よりも低く制限する低速制御(ステップ355)の少なくとも一方を阻害時制御として実行するように構成されている。
【0008】
本発明装置によれば、阻害物体が存在する場合には、報知制御及び低速制御の少なくとも一方が実行される。報知制御が実行されると、ユーザは阻害物体が存在することに気付き、阻害物体の影響を受けずに車両を目視できる位置に移動する等の適切な対応をとる可能性が高くなる。これにより、接触可能性が高まることを防止できる。低速制御が実行されると、車両が停止するまでにかかる時間が短くなるので、接触可能性が高まることを防止できる。
【図面の簡単な説明】
【0009】
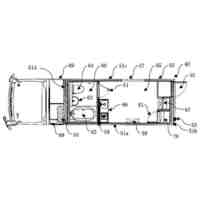
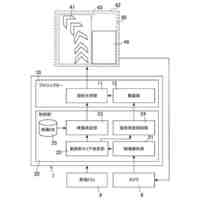
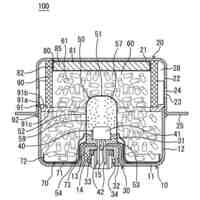
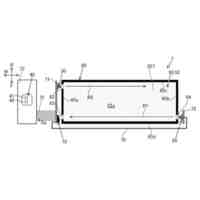
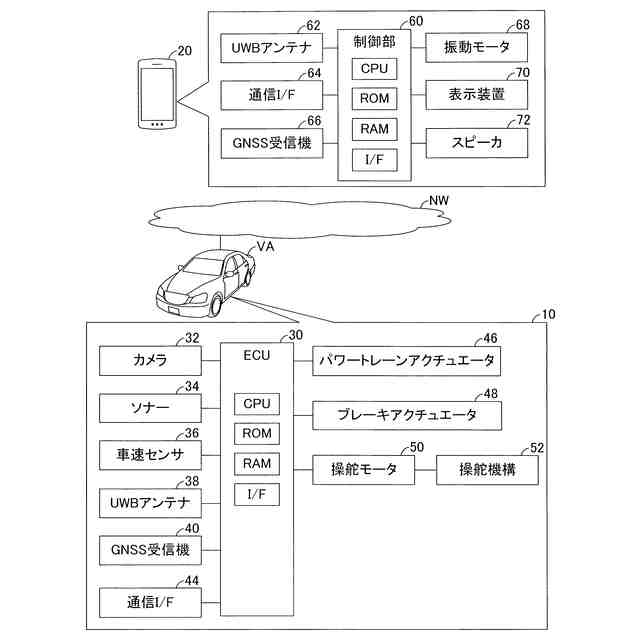
本発明の実施形態に係る遠隔走行制御装置及び遠隔操作装置の概略システム構成図である。
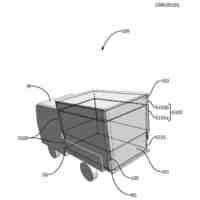
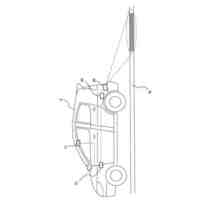
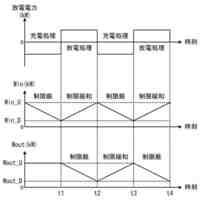
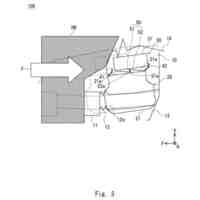
本発明の実施形態に係る遠隔走行制御の作動の概要の説明図である。
図1に示したECUのCPUが実行する遠隔走行制御ルーチンのフローチャートである。
図1に示したECUのCPUが実行する阻害物体判定ルーチンのフローチャートである。
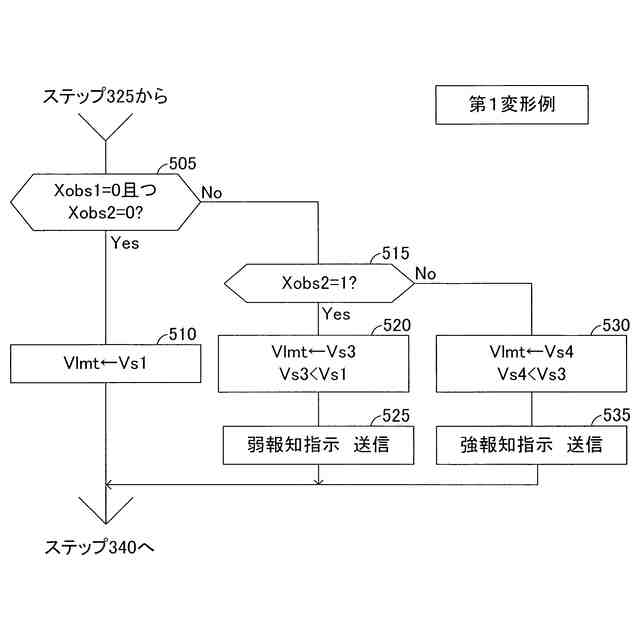
本発明の実施形態の第1変形例に係る遠隔走行制御装置のECUのCPUが実行する遠隔走行制御ルーチンの一部のフローチャートである。
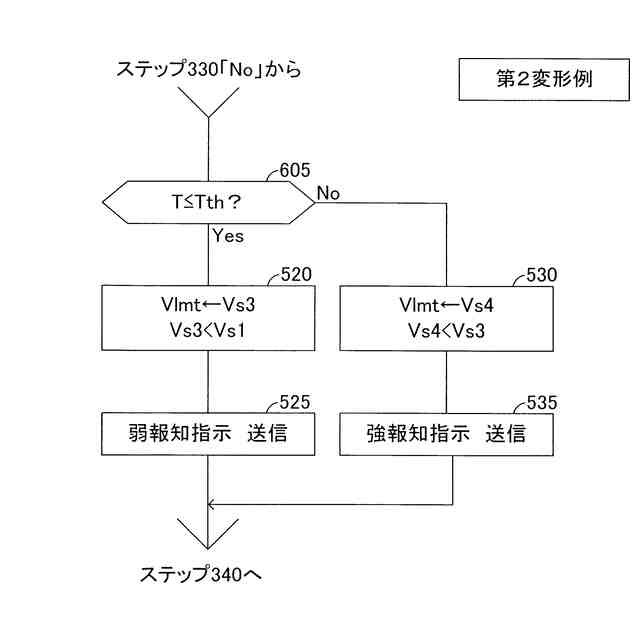
本発明の実施形態の第2変形例に係る遠隔走行制御装置のECUのCPUが実行する遠隔走行制御ルーチンの一部のフローチャートである。
【発明を実施するための形態】
【0010】
図1に示したように、本実施形態に係る遠隔走行制御装置10(以下、「本装置10」と称呼する。)は、車両VAに適用される。遠隔走行制御装置10はネットワークNWを介して遠隔操作装置20に通信可能に接続されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
上部一体型自動車
1か月前
個人
空間形成装置
21日前
日本精機株式会社
照明装置
16日前
個人
マスタシリンダ
1か月前
個人
常設収納型サンバイザー
27日前
日本精機株式会社
車載表示装置
29日前
株式会社豊田自動織機
産業車両
16日前
個人
回転窓ワイパー装置
21日前
日本精機株式会社
車載表示装置
2か月前
日本精機株式会社
画像投映装置
1か月前
日本精機株式会社
車載表示装置
22日前
日本精機株式会社
車載表示装置
24日前
日本精機株式会社
車両用投影装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用報知装置
28日前
個人
音による速度計とプログラム
27日前
井関農機株式会社
作業車両
2か月前
株式会社SUBARU
車両
1か月前
日本精機株式会社
車両用投射装置
1か月前
日本化薬株式会社
ガス発生器
2か月前
日本化薬株式会社
ガス発生器
14日前
日本化薬株式会社
ガス発生器
2か月前
エムケー精工株式会社
車両処理装置
1か月前
日産自動車株式会社
伝動部材
1か月前
日本化薬株式会社
ガス発生器
1か月前
日本化薬株式会社
ガス発生器
1か月前
トヨタ自動車株式会社
制御装置
1か月前
株式会社SUBARU
車体構造
1か月前
株式会社小糸製作所
車両用灯具
1か月前
豊田合成株式会社
乗員保護装置
1か月前
株式会社アイシン
空気袋
1か月前
株式会社ヨコオ
車載装置
14日前
トヨタ自動車株式会社
電動車両
1か月前
極東開発工業株式会社
タンク車
1か月前
トヨタ自動車株式会社
車両
1か月前
日本精機株式会社
車両用投射型表示装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ