TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025168680
公報種別
公開特許公報(A)
公開日
2025-11-12
出願番号
2022159610
出願日
2022-10-03
発明の名称
ロボットシステム
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人前田特許事務所
主分類
B25J
9/16 20060101AFI20251105BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットシステムによって実施される作業の効率を高める。
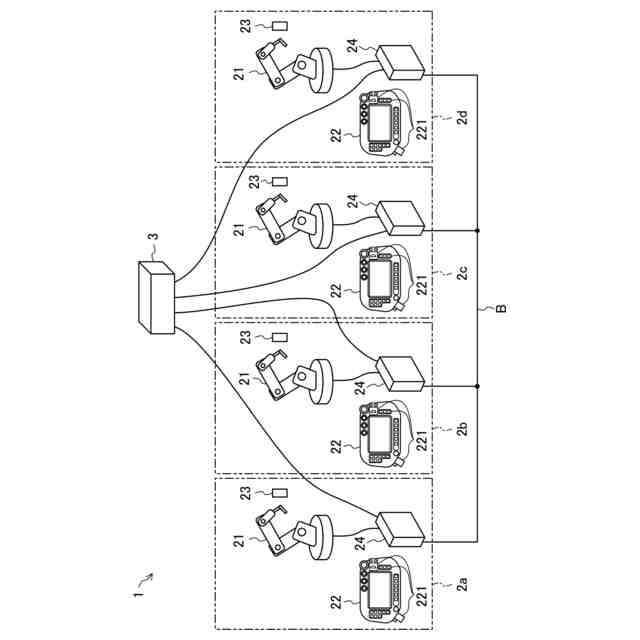
【解決手段】第1のロボット装置2aのコントローラ24に、そのコントローラ24を有する第1のロボット装置2aが属するグループを特定するグループ情報が入力される端子台と、第1のロボット装置2aとは異なる他のロボット装置2b~2dに関連する所定の異常が発生した場合に、他のロボット装置2b~2dによって出力されるグループ情報によって特定されるグループと、端子台に入力されたグループ情報によって特定されるグループとが共通であるか否かに基づいて、ロボット本体21を停止させるか否かを判定する第1の通知用CPUとを設ける。
【選択図】図1
特許請求の範囲
【請求項1】
ロボット本体と、前記ロボット本体を制御するコントローラとを有する複数のロボット装置を備えたロボットシステムであって、
前記コントローラは、
当該コントローラを有する前記ロボット装置が属するグループを特定するグループ情報が入力される属性入力部と、
当該コントローラを有する前記ロボット装置とは異なる他の前記ロボット装置に関連する所定の異常が発生した場合に、前記他のロボット装置によって出力されるグループ情報によって特定されるグループと、前記属性入力部に入力されたグループ情報によって特定されるグループとが共通であるか否かに基づいて、前記ロボット本体を停止させるか否かを判定する制御部とを有することを特徴とするロボットシステム。
続きを表示(約 770 文字)
【請求項2】
請求項1に記載のロボットシステムにおいて、
各前記ロボット装置は、非常停止入力を受け付ける入力装置をさらに有し、
前記異常は、前記他のロボット装置の前記入力装置が前記非常停止入力を受け付けることであることを特徴とするロボットシステム。
【請求項3】
請求項1に記載のロボットシステムにおいて、
各前記ロボット装置は、それぞれ、ユーザの入力を受け付ける入力装置をさらに有し、
各前記コントローラにおいて、
前記属性入力部には、当該コントローラを有する前記ロボット装置がリーダとフォロアのいずれであるかを示すリーダ情報がさらに入力され、
前記制御部は、前記属性入力部に入力された前記グループ情報及び前記リーダ情報に基づいて、当該リーダ情報がリーダを示すときには、当該コントローラを有する前記ロボット装置の前記入力装置への前記入力に基づいて、共通のグループに属する他の前記ロボット装置の前記コントローラを制御する一方、当該リーダ情報がフォロアを示すときには、共通のグループに属する他の前記ロボット装置の前記コントローラによって制御されることを特徴とするロボットシステム。
【請求項4】
請求項3に記載のロボットシステムにおいて、
各前記コントローラにおいて、
前記制御部は、前記属性入力部に入力される前記リーダ情報を参照し、当該コントローラを有する前記ロボット本体を停止させるか否かの判定を、前記リーダ情報がフォロアを示すときに、当該コントローラを有する前記ロボット装置の前記入力装置への前記入力と、共通のグループに属する他の前記ロボット装置の前記入力装置への前記入力とに基づいて行うことを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、複数のロボット装置を備えたロボットシステムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、ロボット本体と、前記ロボット本体を制御するコントローラとを有する3つのロボット装置を備えたロボットシステムが開示されている。このロボットシステムでは、1つのロボット装置のコントローラに接続された非常停止スイッチが押されると、3つのロボット装置のロボット本体の動作が禁止される。
【先行技術文献】
【特許文献】
【0003】
特許第6613851号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、非常停止スイッチが押される等の異常が発生したときに、一部のロボット本体の動作を継続させても問題がない場合がある。このような場合でも、特許文献1のロボットシステムは、異常の発生時に、ロボットシステムを構成するすべてのロボット本体の動作を停止させるので、ロボットシステムによって実施される作業の効率が低くなる。
【0005】
本開示は、かかる点に鑑みてなされたものであり、その目的とするところは、ロボットシステムによって実施される作業の効率を高めることにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本開示は、ロボット本体と、前記ロボット本体を制御するコントローラとを有する複数のロボット装置を備えたロボットシステムであって、前記コントローラは、当該コントローラを有する前記ロボット装置が属するグループを特定するグループ情報が入力される属性入力部と、当該コントローラを有する前記ロボット装置とは異なる他の前記ロボット装置に関連する所定の異常が発生した場合に、前記他のロボット装置によって出力されるグループ情報によって特定されるグループと、前記属性入力部に入力されたグループ情報によって特定されるグループとが共通であるか否かに基づいて、前記ロボット本体を停止させるか否かを判定する制御部とを有することを特徴とする。
【0007】
これにより、いずれかのロボット装置に関する異常が発生した場合に、そのロボット装置とは異なるグループのロボット装置のロボット本体の動作を継続させることができるので、全てのロボット本体を停止させる場合に比べ、ロボットシステムによって実施される作業の効率を高めることができる。
【発明の効果】
【0008】
本開示によると、ロボットシステムによって実施される作業の効率を高めることできる。
【図面の簡単な説明】
【0009】
本開示の実施形態に係るロボットシステムの構成を示す概略図である。
ロボット装置の構成を示すブロック図である。
各ロボット装置のコントローラに記憶される協調情報、グループ情報、及びリーダ情報を示す表である。
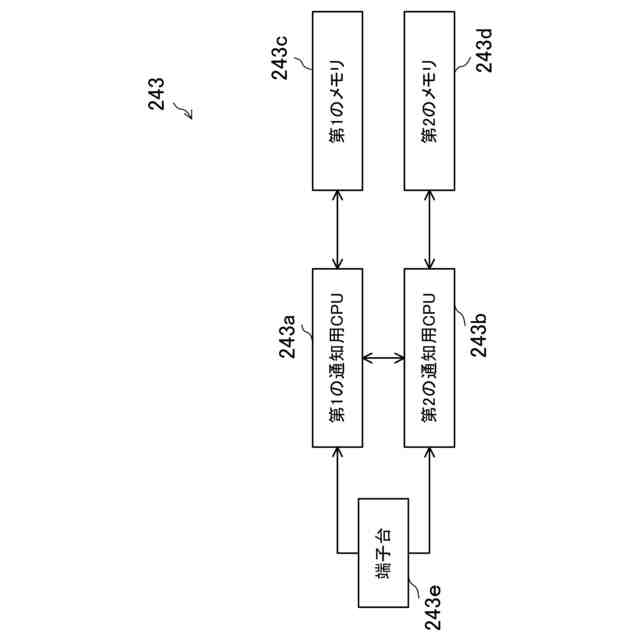
通知用基板の構成を示すブロック図である。
【発明を実施するための形態】
【0010】
以下、本開示の実施形態について図面に基づいて説明する。以下の好ましい実施形態の説明は、本質的に例示に過ぎず、本発明、その適用物或いはその用途を制限することを意図するものでは全くない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
15日前
川崎重工業株式会社
ロボット
1か月前
株式会社三協システム
移載装置
2か月前
トヨタ自動車株式会社
学習装置
今日
株式会社竹中工務店
補助セット
1か月前
株式会社不二越
ロボット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
24日前
株式会社マキタ
ハンマドリル
24日前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボット
1か月前
株式会社安川電機
ロボット
21日前
川崎重工業株式会社
塗装システム
1か月前
株式会社不二越
ロボットシステム
2か月前
本田技研工業株式会社
装置
1か月前
株式会社不二越
エッジ仕上げ装置
2か月前
株式会社三共コーポレーション
工具保持具
15日前
トヨタ自動車株式会社
軌道生成装置
1か月前
株式会社不二越
垂直多関節ロボット
今日
株式会社不二越
垂直多関節ロボット
2か月前
トヨタ自動車株式会社
ロボットハンド
21日前
ライオン株式会社
移載システム
2か月前
工機ホールディングス株式会社
作業機
1か月前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
アネックスツール株式会社
ドライバービット
1か月前
株式会社マキタ
回転打撃工具
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
山九株式会社
レンチ保持治具
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
2か月前
NTN株式会社
ハンド
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ