TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025163783
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024067300
出願日
2024-04-18
発明の名称
情報処理装置、情報処理方法、及び、プログラム
出願人
コニカミノルタ株式会社
代理人
弁理士法人光陽国際特許事務所
,
弁理士法人信友国際特許事務所
主分類
B25J
9/22 20060101AFI20251023BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】設定した姿勢に干渉がないと判断したら、経路生成で必ず干渉が発生する状況を解消できるようにする。
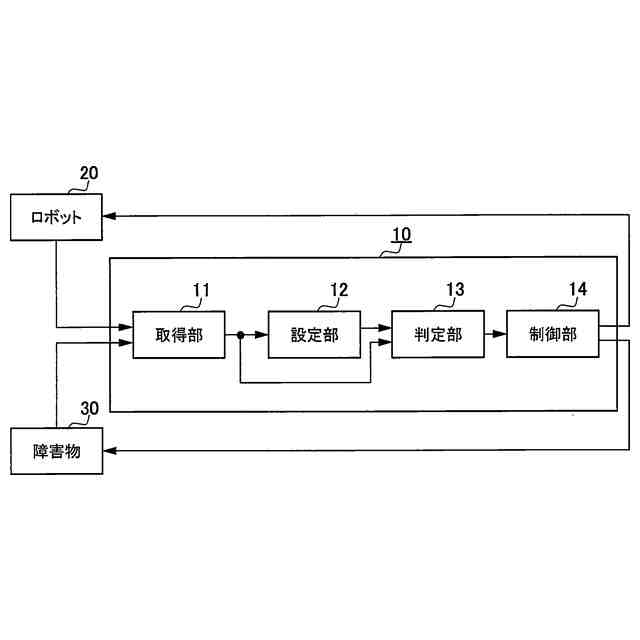
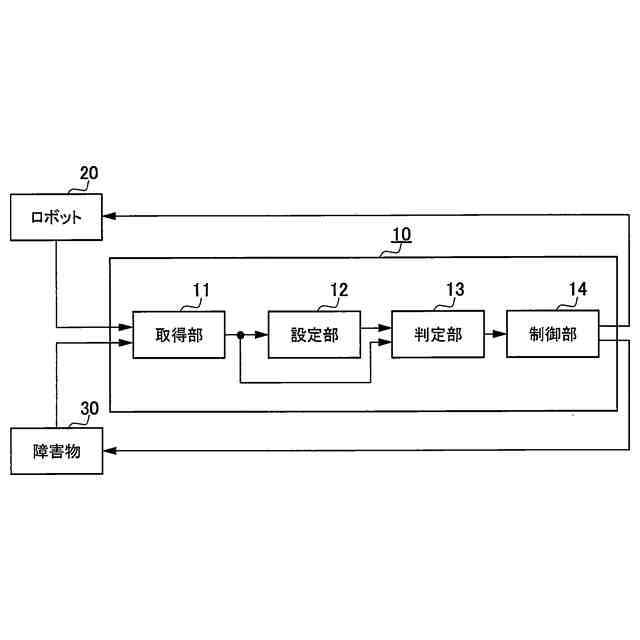
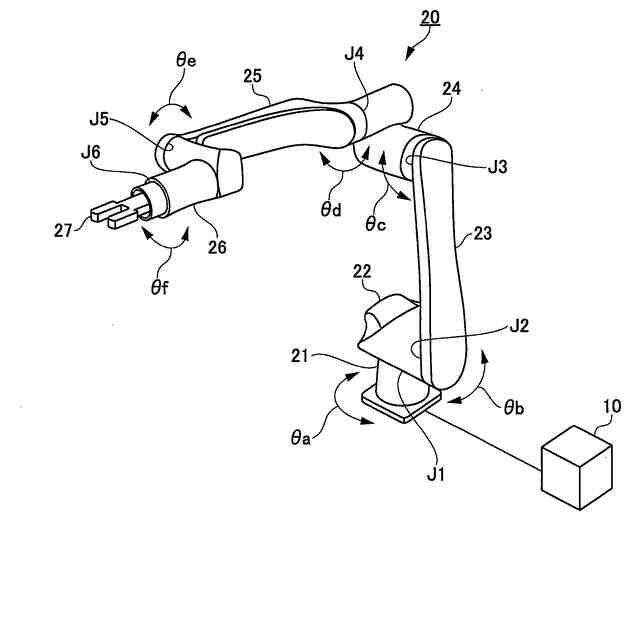
【解決手段】本発明の情報処理装置10は、ロボット20及び障害物30に関する各情報を取得する取得部11と、ロボット20が第1姿勢から第2姿勢に変化する区間における第1のクリアランス量と、第2姿勢から第3姿勢に変化する区間における第2のクリアランス量とを設定する設定部12と、取得部11が取得した情報と設定部12が設定したクリアランス量とに基づいて、各姿勢においてロボット20と障害物30とが干渉するか否かを判定する判定部13と、を備える。そして、判定部13は、第2姿勢における判定を、第1のクリアランス量及び第2のクリアランス量のうち大きい方に基づいて行う。
【選択図】図1
特許請求の範囲
【請求項1】
ロボット及び障害物に関する各情報を取得する取得部と、
前記ロボットが第1姿勢から第2姿勢に変化する区間における第1のクリアランス量と、第2姿勢から第3姿勢に変化する区間における第2のクリアランス量とを設定する設定部と、
前記取得部が取得した情報と前記設定部が設定したクリアランス量とに基づいて、前記第2姿勢において前記ロボットと前記障害物とが干渉するか否かを判定する際に、前記第1のクリアランス量及び前記第2のクリアランス量のうち大きい方に基づいて判定を行う判定部と、
を備える情報処理装置。
続きを表示(約 1,300 文字)
【請求項2】
前記ロボットに関する情報は、前記ロボットの姿勢情報及び位置情報であり、
前記障害物に関する情報は、前記障害物の位置情報及び形状情報である
請求項1に記載の情報処理装置。
【請求項3】
前記判定部の判定結果に基づいて、前記ロボットの位置、前記障害物の位置、または、前記設定部が設定したクリアランス量を制御する制御部をさらに備える
請求項1に記載の情報処理装置。
【請求項4】
前記制御部は、前記判定部が前記ロボットと前記障害物とが干渉すると判定した場合、前記ロボットの姿勢を前記障害物と干渉しない姿勢に変更する
請求項3に記載の情報処理装置。
【請求項5】
前記制御部は、前記判定部が前記ロボットと前記障害物とが干渉すると判定した場合、干渉している姿勢のターゲット位置を干渉しない位置に変更する
請求項3に記載の情報処理装置。
【請求項6】
前記制御部は、前記判定部が前記ロボットと前記障害物とが干渉すると判定した場合、前記ロボットの位置を干渉しない位置に変更する
請求項3に記載の情報処理装置。
【請求項7】
前記制御部は、前記判定部が前記ロボットと前記障害物とが干渉すると判定した場合、前記障害物の位置を干渉しない位置に変更する
請求項3に記載の情報処理装置。
【請求項8】
前記制御部は、前記判定部が前記ロボットと前記障害物とが干渉すると判定した場合、干渉している姿勢を含む区間のクリアランス量の値を干渉しなくなる値に変更する
請求項3に記載の情報処理装置。
【請求項9】
ロボット及び障害物に関する各情報を取得する取得ステップと、
前記ロボットが第1姿勢から第2姿勢に変化する区間における第1のクリアランス量と、第2姿勢から第3姿勢に変化する区間における第2のクリアランス量とを設定する設定ステップと、
前記取得ステップで取得した情報と前記設定ステップで設定したクリアランス量とに基づいて、前記第2姿勢において前記ロボットと前記障害物とが干渉するか否かを判定する際に、前記第1のクリアランス量及び前記第2のクリアランス量のうち大きい方に基づいて判定を行う判定ステップと、
の各処理を実行する情報処理方法。
【請求項10】
ロボット及び障害物に関する各情報を取得する取得ステップと、
前記ロボットが第1姿勢から第2姿勢に変化する区間における第1のクリアランス量と、第2姿勢から第3姿勢に変化する区間における第2のクリアランス量とを設定する設定ステップと、
前記取得ステップで取得した情報と前記設定ステップで設定したクリアランス量とに基づいて、前記第2姿勢において前記ロボットと前記障害物とが干渉するか否かを判定する際に、前記第1のクリアランス量及び前記第2のクリアランス量のうち大きい方に基づいて判定を行う判定ステップと、
の各ステップの処理をコンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法、及び、プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
情報処理装置の一例として、実際にロボットを動かす前に仮想環境上で現実の環境を再現するロボットシミュレータがある。ロボットシミュレータは、ロボットの姿勢間を結ぶ区間を障害物との干渉を避けて移動する経路を自動で生成可能なシミュレータである(例えば、特許文献1参照)。特許文献1は、ロボット及び障害物に関する情報を取得し、この取得した情報に基づいてロボットと障害物との干渉を回避するためのクリアランス量を設定し、この設定したクリアランス量に基づいてロボットの経路を生成する技術を開示している。
【先行技術文献】
【特許文献】
【0003】
特許第7147571号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ロボットの経路を生成するには事前に区間を作る姿勢を決定し、その姿勢が障害物と干渉していないことを確認する必要がある。複数の区間の経路を生成するとき、どの区間に対しても一律のクリアランス量を設定するシミュレータの場合、クリアランス量を大きく設定する必要がない区間でも他の区間に合わせて大きいクリアランス量を設定することになる。このように、クリアランス量を大きく設定する必要がない区間に対して、必要以上に大きいクリアランス量を設定すると、生成する経路が無駄に大きくなるためにタクトタイムが長くなる。
【0005】
これに対して、経路を生成する区間ごとに異なるクリアランス量を設定できるようにした場合、姿勢が障害物と干渉していないことを確認するために、各区間に設定したクリアランス量を各姿勢にも適用して干渉チェックを行うことになる。このとき、各姿勢にどの区間のクリアランス量を適用するかによって、その後の経路生成で必ず干渉が発生する状況が生じる場合がある。
【0006】
本発明は、経路を生成する区間ごとに異なるクリアランス量を設定する際に、設定した姿勢に干渉がないと判断したら、経路生成で必ず干渉が発生する状況を解消することができる情報処理装置、情報処理方法、及び、プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するための本発明の情報処理装置は、ロボット及び障害物に関する各情報を取得する取得部と、ロボットが第1姿勢から第2姿勢に変化する区間における第1のクリアランス量と、第2姿勢から第3姿勢に変化する区間における第2のクリアランス量とを設定する設定部と、取得部が取得した情報と設定部が設定したクリアランス量とに基づいて、第2姿勢においてロボットと障害物とが干渉するか否かを判定する際に、第1のクリアランス量及び第2のクリアランス量のうち大きい方に基づいて判定を行う判定部と、を備える。
【0008】
また、上記課題を解決するための本発明の情報処理方法は、ロボット及び障害物に関する各情報を取得する取得ステップと、ロボットが第1姿勢から第2姿勢に変化する区間における第1のクリアランス量と、第2姿勢から第3姿勢に変化する区間における第2のクリアランス量とを設定する設定ステップと、取得ステップで取得した情報と設定ステップで設定したクリアランス量とに基づいて、第2姿勢においてロボットと障害物とが干渉するか否かを判定する際に、第1のクリアランス量及び第2のクリアランス量のうち大きい方に基づいて判定を行う判定ステップと、の各処理を実行する。
【0009】
また、上記課題を解決するための本発明のプログラムは、上記情報処理方法の各ステップの処理をコンピュータに実行させるためのプログラムである。
【発明の効果】
【0010】
本発明によれば、経路を生成する区間ごとに異なるクリアランス量を設定する際に、設定した姿勢に干渉がないと判断したら、経路生成で必ず干渉が発生する状況を解消することができる。
上記した以外の課題、構成、及び、効果は、以下の発明を実施するための形態(以下、「実施形態」と記述する)の説明により明らかになる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
コニカミノルタ株式会社
断裁装置、画像形成システム及び断裁位置決定方法
4日前
コニカミノルタ株式会社
画像形成装置
4日前
コニカミノルタ株式会社
インクジェット用インク、ソルダーレジスト、プリント配線基板、塗膜形成方法及び塗膜形成装置
4日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
19日前
川崎重工業株式会社
ロボット
1か月前
トヨタ自動車株式会社
学習装置
4日前
株式会社竹中工務店
補助セット
1か月前
株式会社不二越
ロボット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
28日前
株式会社マキタ
ハンマドリル
28日前
トヨタ自動車株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
移動ロボットシステム
1か月前
本田技研工業株式会社
装置
1か月前
川崎重工業株式会社
塗装システム
1か月前
株式会社不二越
エッジ仕上げ装置
2か月前
株式会社安川電機
ロボット
25日前
株式会社不二越
垂直多関節ロボット
4日前
トヨタ自動車株式会社
軌道生成装置
1か月前
株式会社三共コーポレーション
工具保持具
19日前
株式会社不二越
垂直多関節ロボット
2か月前
アネックスツール株式会社
ドライバービット
1か月前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
ライオン株式会社
移載システム
2か月前
トヨタ自動車株式会社
ロボットハンド
25日前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
株式会社マキタ
回転打撃工具
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
現場用作業機
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
山九株式会社
レンチ保持治具
1か月前
セイコーエプソン株式会社
ロボット
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ