TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025163526
公報種別
公開特許公報(A)
公開日
2025-10-29
出願番号
2024066868
出願日
2024-04-17
発明の名称
農作業機、農作業機の制御方法、及びコンピュータプログラム
出願人
株式会社クボタ
代理人
個人
,
個人
主分類
A01B
69/00 20060101AFI20251022BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動操舵機能がオンである場合にユーザの手動操舵に応じて自動操舵機能を適切にオフにすることができる農作業機、農作業機の制御方法、及びコンピュータプログラムを提供する。
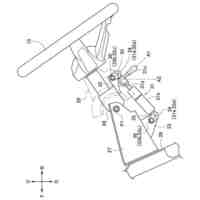
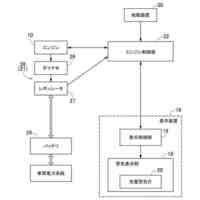
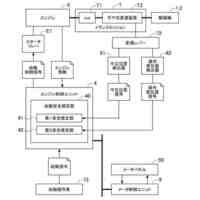
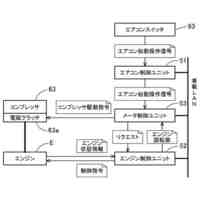
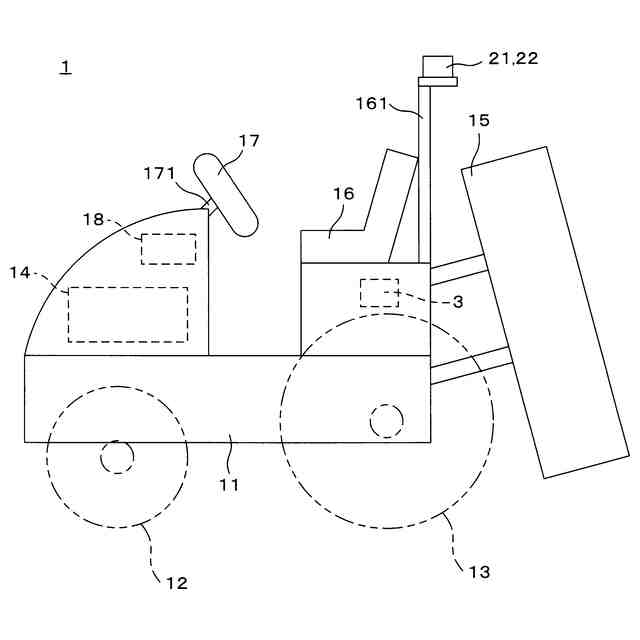
【解決手段】本開示に係る農作業機は、予め設定された直線経路に沿って自動操舵により車体が走行する機能を有する農作業機であって、ステアリングハンドル17と、制御部33とを備え、該制御部33は、前記機能がオンとなった後に、前記ステアリングハンドル17が操作されたことによる手動操舵を検出したか否かを判定し、該手動操舵を検出した回数に基づいて前記機能をオフにする処理を実行することを特徴とする。
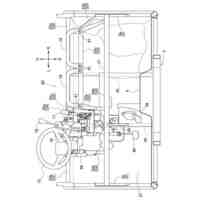
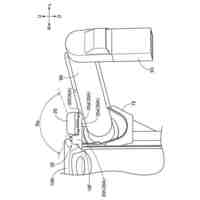
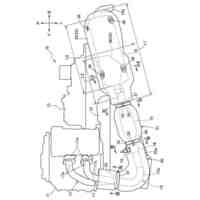
【選択図】図2
特許請求の範囲
【請求項1】
予め設定された直線経路に沿って自動操舵により車体が走行する機能を有する農作業機であって、
ステアリングハンドルと、
制御部と
を備え、
該制御部は、
前記機能がオンとなった後に、前記ステアリングハンドルが操作されたことによる手動操舵を検出したか否かを判定し、
該手動操舵を検出した回数に基づいて前記機能をオフにする
処理を実行することを特徴とする農作業機。
続きを表示(約 1,100 文字)
【請求項2】
前記手動操舵に関わる物理量を検出する検出部を更に備え、
前記制御部は、
前記検出部の検出結果の絶対値が所定閾値以上である場合に、前記手動操舵を検出したと判定して前記回数をインクリメントする
処理を実行することを特徴とする請求項1に記載の農作業機。
【請求項3】
前記制御部は、
前記検出結果に基づいて前記手動操舵が示す操向方向を求め、
前記検出結果の前記絶対値が前記所定閾値以上であり、且つ、求めた前記操向方向と前記機能に基づく操向方向とが逆向きである場合に、前記手動操舵を検出したと判定して前記回数をインクリメントする
処理を実行することを特徴とする請求項2に記載の農作業機。
【請求項4】
前記制御部は、
前記検出結果の前記絶対値が前記所定閾値よりも大きい第2の所定閾値以上であるとき、前記回数を更にインクリメントする
処理を実行することを特徴とする請求項2又は3に記載の農作業機。
【請求項5】
前記機能をオフにする場合に操作される操作部を更に備え、
前記制御部は、
前記検出結果の前記絶対値が前記所定閾値未満である場合、又は前記操作部が操作された場合、前記回数をリセットする
処理を実行することを特徴とする請求項2又は3に記載の農作業機。
【請求項6】
前記制御部は、
前記検出結果を断続的に取得し、
取得した前記検出結果が正値か負値かを求め、
前記検出結果の正負が前回と今回とで相違する場合、前記回数をリセットする
処理を実行することを特徴とする請求項2又は3に記載の農作業機。
【請求項7】
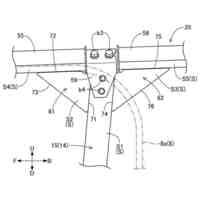
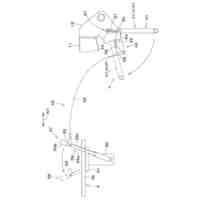
前記機能がオンである場合に前記ステアリングハンドルを駆動する電動式のステアリングモータ
を更に備え、
前記検出部は、前記ステアリングモータの電流値又はトルク値を検出することを特徴とする請求項2又は3に記載の農作業機。
【請求項8】
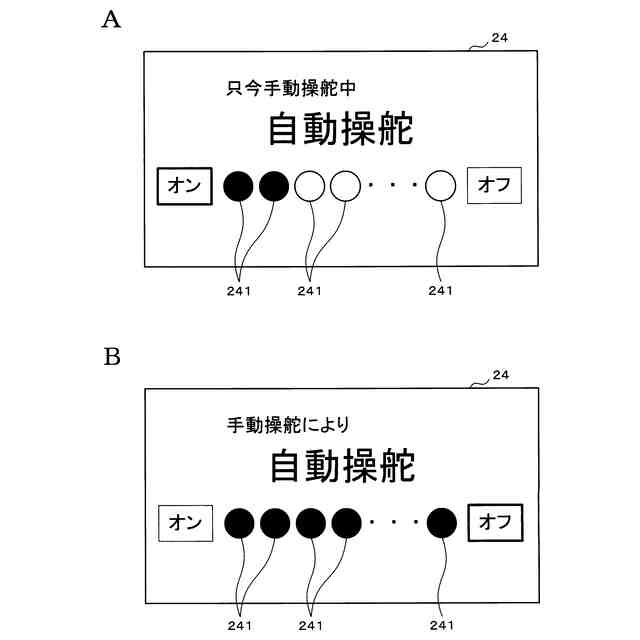
前記機能をオフにする際に、前記手動操舵により前記機能をオフにすることを報知する報知部を更に備えることを特徴とする請求項1に記載の農作業機。
【請求項9】
前記回数に基づいて、前記機能がオフになるタイミングの目安を表示する表示部を更に備えることを特徴とする請求項1に記載の農作業機。
【請求項10】
前記制御部は、前記回数が所定回数以上である場合に前記機能をオフにし、前記回数をリセットすることを特徴とする請求項1に記載の農作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は農作業機、農作業機の制御方法、及びコンピュータプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、予め設定された直線経路に沿って自動操舵により車体が走行する機能(以下、自動操舵機能という)を有する農作業機が用いられている。ステアリングハンドルを備える農作業機において、自動操舵機能がオフの場合、ユーザはステアリングハンドルを操作することにより手動操舵を行なう。一方、自動操舵機能がオンの場合、農作業機は自動的に直進するので、農作業機を直進させるためにユーザが手動操舵を行なう必要はない。
【0003】
自動操舵機能がオンの場合、例えば進路上の障害物を回避するとき、ユーザが自動操舵機能をオフにするための押しボタン又はレバー等を手動操作してから手動操舵して農作業機を方向転換させる手順は煩雑である。
そこで、自動操舵機能がオンとなった後に手動操舵が検出された場合、農作業機は自動操舵機能をオフにすると共に、ユーザの所望する方向に向けて走行を開始する。この種の農作業機は、例えば特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2005-081982号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1は手動操舵の誤検出を防ぐ手段について言及していない。手動操舵が誤検出された場合、ユーザは、農作業機が自動操舵機能を勝手にオフにしたように感じて不満に思うかもしれない。
【0006】
本開示の目的は、自動操舵機能がオンである場合にユーザの手動操舵に応じて自動操舵機能を適切にオフにすることができる農作業機、農作業機の制御方法、及びコンピュータプログラムを提供することにある。
【課題を解決するための手段】
【0007】
本開示に係る農作業機は、予め設定された直線経路に沿って自動操舵により車体が走行する機能を有する農作業機であって、ステアリングハンドルと、制御部とを備え、該制御部は、前記機能がオンとなった後に、前記ステアリングハンドルが操作されたことによる手動操舵を検出したか否かを判定し、該手動操舵を検出した回数に基づいて前記機能をオフにする処理を実行することを特徴とする。
【0008】
本開示にあっては、農作業機が自動操舵機能を有する。自動操舵機能がオンの場合、農作業機は予め設定された直線経路に沿って直進する。
制御部は、自動操舵機能がオンとなった後に、ステアリングハンドルが操作されたことによる手動操舵(以下、単に手動操舵という)を検出したか否かを判定し、手動操舵を検出した回数に基づいて自動操舵機能をオフにする。
【0009】
手動操舵を検出した回数が多い場合、手動操舵されたことを誤検出した可能性は小さい。即ち、ユーザが自動操舵機能をオフにすることを所望している可能性が大きい。一方、手動操舵を検出した回数が少ない場合、手動操舵されたことを誤検出した可能性は大きい。即ち、ユーザが自動操舵機能の継続利用を所望している可能性が大きい。
故に、手動操舵を検出した回数に基づいて自動操舵機能をオフにすることにより、自動操舵機能がオンである場合にユーザの手動操舵に応じて自動操舵機能を適切にオフにすることができる。
【0010】
本開示に係る農作業機は、前記手動操舵に関わる物理量を検出する検出部を更に備え、前記制御部は、前記検出部の検出結果の絶対値が所定閾値以上である場合に、前記手動操舵を検出したと判定して前記回数をインクリメントする処理を実行することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業機
15日前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
28日前
株式会社クボタ
作業車
22日前
株式会社クボタ
作業車
28日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
29日前
株式会社クボタ
作業車
7日前
株式会社クボタ
作業車
7日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業車
23日前
株式会社クボタ
作業車両
28日前
株式会社クボタ
作業車両
28日前
株式会社クボタ
作業車両
29日前
株式会社クボタ
作業車両
16日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
7日前
株式会社クボタ
作業車両
7日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
多目的車両
1か月前
株式会社クボタ
多目的車両
1か月前
株式会社クボタ
多目的車両
1か月前
株式会社クボタ
ガスケット
1か月前
株式会社クボタ
多目的車両
1か月前
株式会社クボタ
多目的車両
1か月前
株式会社クボタ
豆類選別機
1か月前
株式会社クボタ
豆類選別機
1か月前
株式会社クボタ
豆類選別機
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ