TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025162639
公報種別
公開特許公報(A)
公開日
2025-10-28
出願番号
2024065947
出願日
2024-04-16
発明の名称
ロボット
出願人
THK株式会社
,
学校法人東京女子医科大学
代理人
弁理士法人秀和特許事務所
主分類
B25J
15/08 20060101AFI20251021BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】手術用の器械に対応するロボットを提供する。
【解決手段】ハンド部2と、ハンド部2が接続されるアーム部3と、制御部7と、を備え、手術用の器械を執刀医に渡すロボット1であって、ハンド部2は、内部に粉粒体が収容される袋体202を有するジャミングハンド20と、袋体202の内部から気体を吸引する吸引部24と、器械を撮影するカメラ23と、を備え、制御部7は、吸引部24、カメラ23、及びアーム部3を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
ハンド部と、
前記ハンド部が接続されるアーム部と、
制御部と、
を備え、手術用の器械を執刀医に渡すロボットであって、
前記ハンド部は、
内部に粉粒体が収容される袋体を有するジャミングハンドと、
前記袋体の内部から気体を吸引する吸引部と、
前記器械を撮影するカメラと、
を備え、
前記制御部は、前記吸引部、前記カメラ、及び前記アーム部を制御する、
ロボット。
続きを表示(約 970 文字)
【請求項2】
前記ハンド部は、前記カメラ及び前記吸引部を前記ジャミングハンドに固定する固定部を含んで構成される、
請求項1に記載のロボット。
【請求項3】
前記カメラは、深度カメラを含んで構成され、前記ジャミングハンドの中心軸と略平行となるように前記深度カメラの光軸を向けて前記固定部に固定される、
請求項2に記載のロボット。
【請求項4】
前記制御部は、
前記器械を把持する前に前記深度カメラで前記器械を撮影させ、
撮影により得られた画像を記憶部に記憶させる、
請求項3に記載のロボット。
【請求項5】
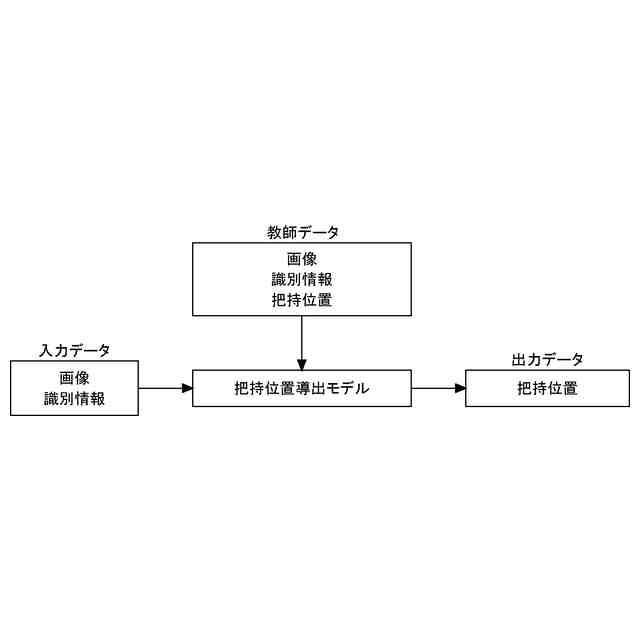
前記制御部は、前記器械の画像及び前記器械の識別情報を入力データとし、前記器械の水平方向の把持位置を出力データとする学習モデルであって、前記器械の画像、前記器械の識別情報、前記器械の水平方向の把持位置を教師データとする学習モデルを生成する、
請求項1に記載のロボット。
【請求項6】
前記教師データにおける前記器械の水平方向の把持位置が、前記執刀医が握る位置以外の位置且つ患者に接触する位置以外の位置である、
請求項5に記載のロボット。
【請求項7】
前記制御部は、前記ハンド部が前記器械を把持するときの前記ハンド部の鉛直方向の目標位置を、前記器械の第1所定位置から前記ハンド部の第2所定位置までの距離が所定距離となるように決定する、
請求項1に記載のロボット。
【請求項8】
前記アーム部は、複数の関節部である肩部、肘部、及び手首部を備え、
前記手首部において前記ハンド部と前記アーム部とが接続され、
前記肩部の可動角度が90度以下に設定され、
前記肘部の可動角度が180度以下に設定される、
請求項1に記載のロボット。
【請求項9】
前記アーム部は、
複数の関節部を有し、
前記複数の関節部を屈曲及び伸展させる複数のステッピングモータを備える、
請求項1に記載のロボット。
【請求項10】
前記アーム部は、手術用ベッドに固定される台座部を備える、
請求項1に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、手術時の器械出しに対応するロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
執刀医の音声指示に応答して、各種先端形状を有する鉗子群の中から特定の鉗子を選択及びピックアップして、執刀医に差し出す手術支援ロボットが知られている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
特開2006-122473号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の従来技術では、平行に配置される2つの板状の指で鉗子を挟んで把持している。このような指では、複雑な形状の手術用具を把持することが困難な場合もあり得る。
【0005】
本発明は、上記のような問題に鑑みてなされたものであって、手術用の器械に対応するロボットの提供を目的とする。
【課題を解決するための手段】
【0006】
本発明に係るロボットは、ハンド部と、前記ハンド部が接続されるアーム部と、制御部と、を備え、手術用の器械を執刀医に渡すロボットであって、前記ハンド部は、内部に粉粒体が収容される袋体を有するジャミングハンドと、前記袋体の内部から気体を吸引する吸引部と、前記器械を撮影するカメラと、を備え、前記制御部は、前記吸引部、前記カメラ、及び前記アーム部を制御する、ロボットである。
【発明の効果】
【0007】
本発明によれば、手術用の器械に対応するロボットを提供することができる。
【図面の簡単な説明】
【0008】
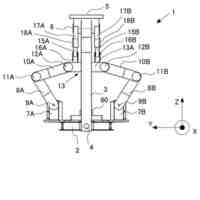
実施形態に係るロボットアームの斜視図である。
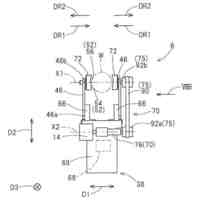
実施形態に係るロボットアームの側面図である。
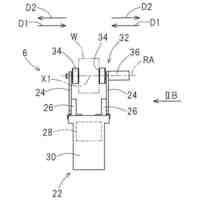
実施形態に係るロボットアームの正面図(図2に示すロボットアームを図2の右側から見た図)である。
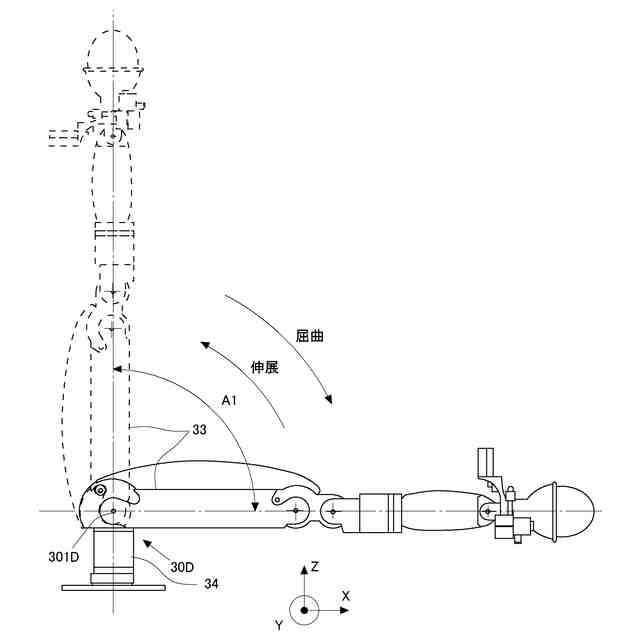
実施形態に係る第4関節部の作動範囲を示す図である。
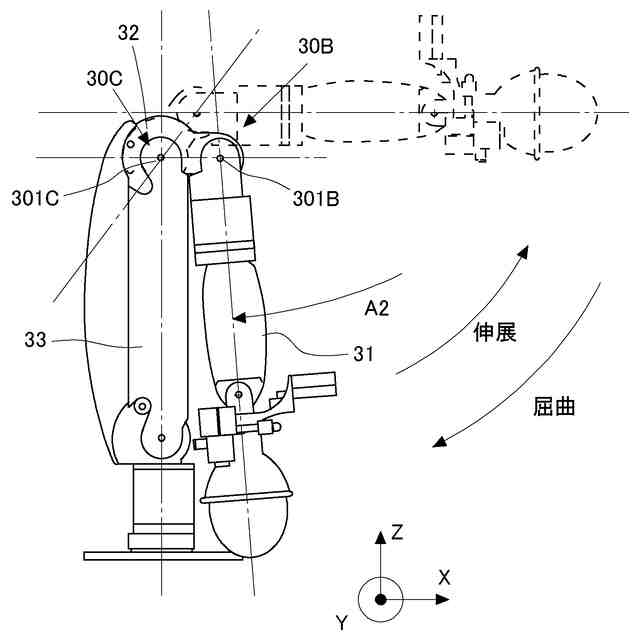
実施形態に係る第2関節部及び第3関節の作動状態を示す図である。
実施形態に係る第2関節部及び第3関節の作動状態を示す図である。
実施形態に係る袋体により器械を把持した状態を示した図である。
実施形態に係る制御装置の概略構成を示すブロック図である。
実施形態に係る機械学習による器械の把持位置を取得する概要を示した図である。
実施形態に係る器械の把持位置を示した図である。
実施形態に係るハンド部が器械を把持するときのハンド部と器械との位置関係を示した図である。
実施形態に係る把持制御のフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の具体的な実施形態について図面に基づいて説明する。本実施形態に記載されている構成部品の寸法、材質、形状、その相対配置等は、特に記載がない限りは発明の技術的範囲をそれらのみに限定する趣旨のものではない。
【0010】
本発明に係るロボットでは、ハンド部によって手術用の器械が把持される。ハンド部は、袋体を有するジャミングハンドを備えており、袋体の内部には粉粒体が収容されている。また、ハンド部は吸引部を備えており、吸引部によって袋体の内部の気体を吸引することにより、袋体内部の粉粒体を固化させることができる。袋体を器械の周りに配置した状態で粉粒体が固化することにより、袋体が器械を把持することができる。なお、器械は、手術用に用いられる道具、器具、装置などを含み得る。カメラによって器械を撮影することにより、制御部は器械の画像を取得することができる。そして、器械の画像に基づいて、器械を把持するように、制御部は、アーム部及び吸引部を制御する。ハンド部は、制御部によって制御されたアーム部によって把持位置まで移動される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
THK株式会社
ロボット
25日前
THK株式会社
飛行ロボットのリンク機構及び飛行ロボット
8日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
17日前
川崎重工業株式会社
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
学習装置
2日前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
26日前
株式会社マキタ
ハンマドリル
26日前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボット
1か月前
本田技研工業株式会社
装置
1か月前
川崎重工業株式会社
塗装システム
1か月前
株式会社安川電機
ロボット
23日前
株式会社三共コーポレーション
工具保持具
17日前
トヨタ自動車株式会社
軌道生成装置
1か月前
株式会社不二越
垂直多関節ロボット
2日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボットハンド
23日前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
アネックスツール株式会社
ドライバービット
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社マキタ
回転打撃工具
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
NTN株式会社
ハンド
1か月前
セイコーエプソン株式会社
ロボット
1か月前
山九株式会社
レンチ保持治具
1か月前
株式会社マキタ
作業機
29日前
株式会社マキタ
電動工具
1か月前
NTN株式会社
把持装置
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ