TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025160957
公報種別
公開特許公報(A)
公開日
2025-10-24
出願番号
2024063722
出願日
2024-04-11
発明の名称
制御装置、ロボットシステム、システム、制御方法、及び制御プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20251017BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボット動作のタスク処理を高速化する。
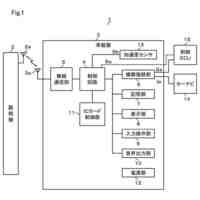
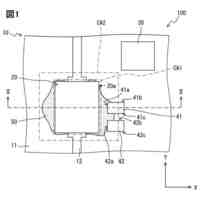
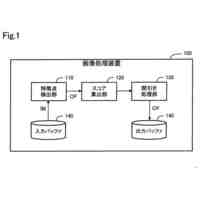
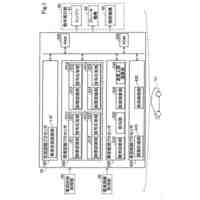
【解決手段】ユーザとのインタラクションに基づいてロボット(15)を制御する制御装置(11)は、ロボットに対するユーザからの指示を受け付ける入力部(114)と、ユーザに対して指示への応答を出力する出力部(116)と、機能モジュールの機能リストを記憶している機能リスト記憶部(112a)と、入力部から入力された指示のデータを保存する入力バッファ(112b)と、自然言語処理システム(50)に対して、機能リストと入力バッファのデータを含むプロンプトを送信し、自然言語処理システムからの回答を受信し、回答により特定した機能モジュールをロボットに実行させる処理部(111)と、を備え、処理部は、機能モジュールが正常に実行された場合の実行結果が推定結果として機能リスト記憶部に存在する場合に、当該推定結果を入力バッファに上書きする。
【選択図】図1
特許請求の範囲
【請求項1】
ユーザとのインタラクションに基づいてロボット(15,25)を制御するための制御装置(11,21)であって、
前記ロボットに対する前記ユーザからの指示を受け付ける入力部(114)と、
前記ユーザに対して前記指示に対する応答を出力する出力部(116)と、
前記ロボットに実行させる予め定められた複数の動作の各々が機能モジュールとして規定され、当該機能モジュールの機能リストを記憶している機能リスト記憶部(112a)と、
前記入力部から入力された前記指示のデータを保存する入力バッファ(112b)と、
大規模言語モデルを利用した自然言語処理システム(50)に対して、前記機能リストと、前記入力バッファから読み出したデータとを含むプロンプトを送信し、前記自然言語処理システムからの回答を受信すると共に、前記回答により特定した機能モジュールを前記ロボットに実行させる処理部(111,211)と、
を備え、
前記機能リスト記憶部は、前記機能モジュールが正常に実行された場合に返す実行結果を推定結果として、前記機能モジュールに対応させて記憶しており、
前記処理部は、前記回答により特定された前記機能モジュールの前記推定結果が前記機能リスト記憶部に存在する場合に、前記推定結果を前記入力バッファに上書きする、制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記処理部は、前記推定結果を前記入力バッファに上書きすると、上書きされた前記入力バッファから読み出したデータを含めた前記プロンプトを前記自然言語処理システムに送信する、請求項1に記載の制御装置。
【請求項3】
前記処理部は、前記機能モジュールの実行状態とは独立に、前記推定結果を前記入力バッファに上書きする、請求項2に記載の制御装置。
【請求項4】
前記処理部は、前記推定結果が前記機能リスト記憶部に存在しない場合は、前記機能モジュールの実行が完了したときに得られる実行結果を前記入力バッファに上書きする、請求項1に記載の制御装置。
【請求項5】
前記回答により特定される機能モジュールの実行指示を一時的に格納するキュー(118,119)を更に備える、請求項1に記載の制御装置。
【請求項6】
前記処理部は、推論部(111a)と、キュー送信部(111b)とを含み、
前記推論部は、前記回答により特定される機能モジュールの実行指示を前記キュー送信部に送信し、
前記キュー送信部は、前記機能モジュールの実行指示を前記キューに送信する、請求項5に記載の制御装置。
【請求項7】
前記キュー送信部は、前記機能モジュールの実行結果を前記キューから取得し、
前記キュー送信部は、前記機能モジュールの前記推定結果が前記機能リスト記憶部に存在する場合に、前記推定結果と前記実行結果が一致するか否かを確認する、請求項6に記載の制御装置。
【請求項8】
前記機能モジュールを実行する機能モジュール実行部(161a、161b)を含む処理装置(16a、16b)を更に有する、請求項7に記載の制御装置。
【請求項9】
前記処理部は、前記ロボットの各部を含む制御対象のそれぞれに割り当てられた複数のスレッドによって前記機能モジュールを実行する制御を行い、
前記複数のスレッドと、前記制御対象の動作が実行中か否かを示すフラグとを対応付けたスレッドリストを格納したスレッドリスト記憶部を更に備える、請求項1に記載の制御装置。
【請求項10】
前記処理部は、前記機能モジュールを前記ロボットの各部に実行させるときに該当のスレッドのフラグが上がっているか否かを確認し、前記スレッドのフラグが上がっていない場合に、当該機能モジュールを実行すると共に当該スレッドのフラグを上げ、前記機能モジュールの実行が完了した前記スレッドのフラグを下げる、請求項9に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ユーザとのインタラクションに基づいてロボットを制御する技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、自然言語によるユーザからの指示を介したユーザとのインタラクションに基づいて、柔軟に動作可能なロボットが注目されている。
【0003】
特許文献1には、1つのタスクが終了してから次のタスクを導出するワークフロー管理方法が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2010-170230号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載のワークフロー管理方法を、自然言語によるインタラクションを可能にする大規模言語モデルを利用した自然言語処理システムと組み合わせると、自然言語処理システムはタスクの導出に時間を要するため、ロボット動作のタスクの導出のたびに待ち時間が発生し、ロボット動作のタスク処理に時間を要する。
【0006】
本発明は上記課題に鑑み、ロボット動作のタスク処理を高速化することを目的とする。
【課題を解決するための手段】
【0007】
本発明は上記課題を解決するために以下の技術的手段を採用する。特許請求の範囲及びこの項に記載した括弧内の符号は、ひとつの態様として後述する実施形態に記載の具体的手段との対応関係を示す一例であって、本発明の技術的範囲を限定するものではない。
【0008】
本発明の一態様の制御装置(11、21)は、ユーザとのインタラクションに基づいてロボット(15、25)を制御するための制御装置であって、前記ロボットに対する前記ユーザからの指示を受け付ける入力部(114)と、前記ユーザに対して前記指示に対する応答を出力する出力部(116)と、前記ロボットに実行させる予め定められた複数の動作の各々が機能モジュールとして規定され、当該機能モジュールの機能リストを記憶している機能リスト記憶部(112a)と、前記入力部から入力された前記指示のデータを保存する入力バッファ(112b)と、大規模言語モデルを利用した自然言語処理システム(50)に対して、前記機能リストと、前記入力バッファから読み出したデータとを含むプロンプトを送信し、前記自然言語処理システムからの回答を受信すると共に、前記回答により特定した機能モジュールを前記ロボットに実行させる処理部(111、211)と、を備え、前記機能リスト記憶部は、前記機能モジュールが正常に実行された場合に返す実行結果を推定結果として、前記機能モジュールに対応させて記憶しており、前記処理部は、前記回答により特定された前記機能モジュールの前記推定結果が前記機能リスト記憶部に存在する場合に、前記推定結果を前記入力バッファに上書きする。
【0009】
上記構成により、処理部は、自然言語処理システムからの回答により特定された機能モジュールを実行することで実際にロボットを動作させることなく、当該機能モジュールの推定結果を利用して自然言語処理システムに次の回答を推測させることができる。これにより、処理部は、機能モジュールの推定結果が機能リスト記憶部に存在する場合は、当該機能モジュールの実行結果が正常であることを前提に機能モジュールを推測することができ、機能モジュールの実行完了を待つことなくロボットの次の動作を推測できる。したがって、ロボット動作のタスク処理を高速化できる。
【0010】
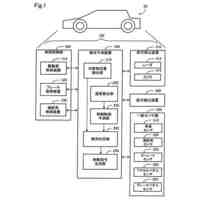
本発明の一態様のロボットシステム(10)は、上記の制御装置(11)と、前記機能モジュールを実行する機能モジュール実行部を含む処理装置(16a、16b)と、前記機能モジュール実行部が前記機能モジュールを実行することにより生成される動作命令により制御されるロボット(15)と、を備える。
本発明の一態様のシステム(100)は、上記のロボットシステム(10)と、上記の自然言語処理システム(50)と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーウェーブ
筐体
11日前
株式会社デンソー
車載器
24日前
株式会社デンソー
回転機
11日前
株式会社デンソー
検出装置
10日前
株式会社デンソー
ねじ部材
24日前
株式会社デンソー
ステータ
24日前
株式会社デンソー
ステータ
24日前
株式会社デンソー
電子装置
19日前
株式会社デンソー
電子装置
28日前
株式会社デンソーエレクトロニクス
発音装置
28日前
株式会社デンソー
電子装置
18日前
株式会社デンソー
反力装置
18日前
株式会社デンソー
電子装置
今日
株式会社デンソー
電流センサ
11日前
株式会社デンソー
レーダ装置
28日前
株式会社デンソーテン
インバータ
18日前
株式会社デンソー
農業用装置
20日前
株式会社デンソー
熱交換装置
4日前
株式会社デンソー
半導体装置
24日前
株式会社デンソー
レーダ装置
17日前
株式会社デンソー
半導体装置
6日前
株式会社デンソー
画像処理装置
11日前
株式会社デンソー
車両制御装置
18日前
株式会社デンソー
通信システム
28日前
株式会社デンソー
電子制御装置
28日前
株式会社デンソー
衝突予測装置
19日前
株式会社デンソー
運転支援装置
19日前
株式会社デンソー
制御システム
1か月前
株式会社デンソー
衝突予測装置
19日前
株式会社デンソー
電力変換装置
12日前
株式会社デンソー
電波吸収装置
28日前
株式会社デンソー
電圧検出回路
20日前
株式会社デンソー
電力変換装置
1か月前
株式会社デンソー
運航管理装置
17日前
株式会社デンソー
車載システム
18日前
株式会社デンソー
車載システム
18日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ