TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025149489
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024050179
出願日
2024-03-26
発明の名称
衝突予測装置
出願人
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
,
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B60W
30/09 20120101AFI20251001BHJP(車両一般)
要約
【課題】自動ブレーキの不要な作動を防止しつつ、衝突を回避又は軽減できる技術を提供する。
【解決手段】衝突予測装置200は、対象物の現在位置を検出する対象物位置検出部210と、自車両の移動軌跡を予測する移動軌跡予測部230と、自車両の移動軌跡と対象物の現在位置との関係を用いて、自車両と対象物とが衝突する可能性があるか否かの衝突判定を実行する衝突判定部240と、を備える。衝突判定部は、(a)自車両のアクセルペダルの操作量又は操作量の時間変化率が閾値以上であることを含むアクセル判定条件が成立し、かつ、対象物が移動軌跡に存在する場合には、衝突判定に応じた自動ブレーキの作動を許可する処理と、(b)アクセル判定条件が成立しても、対象物が移動軌跡に存在しない場合には、衝突判定に応じた自動ブレーキの作動を禁止する処理と、を実行するように構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
衝突予測装置(200)であって、
対象物の現在位置を検出する対象物位置検出部(210)と、
自車両の移動軌跡を予測する移動軌跡予測部(230)と、
前記自車両の前記移動軌跡と前記対象物の前記現在位置との関係を用いて、前記自車両と前記対象物とが衝突する可能性があるか否かの衝突判定を実行する衝突判定部(240)と、
を備え、
前記衝突判定部は、
(a)前記自車両のアクセルペダルの操作量又は前記操作量の時間変化率が閾値以上であることを含むアクセル判定条件が成立し、かつ、前記対象物が前記移動軌跡に存在する場合には、前記衝突判定に応じた自動ブレーキの作動を許可する処理と、
(b)前記アクセル判定条件が成立しても、前記対象物が前記移動軌跡に存在しない場合には、前記衝突判定に応じた前記自動ブレーキの作動を禁止する処理と、
を実行するように構成されている、衝突予測装置。
続きを表示(約 410 文字)
【請求項2】
請求項1に記載の衝突予測装置であって、
前記衝突判定部は、前記アクセル判定条件が成立した場合に、予め設定された設定加速度と、前記自車両の現在加速度とのうちのより大きな値を自車加速度として使用して衝突余裕時間を算出する、衝突予測装置。
【請求項3】
請求項2に記載の衝突予測装置であって、
前記アクセル判定条件は、「前記アクセルペダルの前記操作量が第1操作量閾値以上である」という第1条件と、「前記アクセルペダルの前記操作量が第2操作量閾値以上であり、かつ、前記操作量の前記時間変化率が変化率閾値以上である」という第2条件と、の少なくとも一方が成立するときに成立する、衝突予測装置。
【請求項4】
請求項2に記載の衝突予測装置であって、
前記設定加速度は、前記アクセルペダルの前記操作量が最大値である場合の加速度以上の値である、衝突予測装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の衝突予測装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、自車両の曲線状の移動軌跡と相手車両の直線状の移動軌跡との交点を求め、その交点に自車両および相手車両がそれぞれ到達する時間に基づいて自車両と相手車両とが衝突するか否かを判定する衝突予測装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-213535号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、自車両の運転者がブレーキペダルと間違えてアクセルペダルを強く踏んでしまう「誤踏み」については考慮されていない。アクセルペダルが誤踏みされた場合には、自動ブレーキを用いて衝突を回避又は軽減することが好ましい。但し、アクセルペダルを強く踏むケースは、誤踏みした場合だけでなく、運転者が意図的に加速する場合も含まれる。例えば、現時点で対象物が自車両の移動軌跡上に存在しておらず、かつ旋回していることから、衝突しない前提で自車両が加速するようなケースが考えられる。上述した従来技術では対象物の旋回を考慮していないため、このようなケースでは衝突判定が成立してしまい、自動ブレーキを不要に作動させてしまうという課題がある。
【0005】
一方、運転者がアクセルペダルを強く踏み込んだ場合に、自車両の移動軌跡上に対象物が存在してさえいれば自動ブレーキの作動を許可するという方法も考えられる。しかし、この場合には、現時点で対象物が自車両の移動軌跡上に存在するが、実際には、両者がすり抜けて衝突しないケースがあり、この場合には、自動ブレーキを不要に作動させてしまうという課題がある。そこで、自動ブレーキの不要な作動を防止しつつ、衝突を回避又は軽減できる技術が望まれている。
【課題を解決するための手段】
【0006】
本開示の一形態によれば、衝突予測装置(200)が提供される。この衝突予測装置は、対象物の現在位置を検出する対象物位置検出部(210)と、自車両の移動軌跡を予測する移動軌跡予測部(230)と、前記自車両の前記移動軌跡と前記対象物の前記現在位置との関係を用いて、前記自車両と前記対象物とが衝突する可能性があるか否かの衝突判定を実行する衝突判定部(240)と、を備える。前記衝突判定部は、(a)前記自車両のアクセルペダルの操作量又は前記操作量の時間変化率が閾値以上であることを含むアクセル判定条件が成立し、かつ、前記対象物が前記移動軌跡に存在する場合には、前記衝突判定に応じた自動ブレーキの作動を許可する処理と、(b)前記アクセル判定条件が成立しても、前記対象物が前記移動軌跡に存在しない場合には、前記衝突判定に応じた前記自動ブレーキの作動を禁止する処理と、を実行するように構成されている。
【0007】
この衝突予測装置によれば、自車両の移動軌跡に対象物が存在しない場合に自動ブレーキを不要に作動させてしまうことを防止できる。また、アクセルペダルが強く踏み込まれた時点では自車両の移動軌跡に対象物が存在するが、実際には衝突可能性が低いケースにおいて自動ブレーキが不要に作動してしまうことを防止しつつ、衝突を回避又は軽減できる。
【図面の簡単な説明】
【0008】
車両制御システムの構成を示すブロック図。
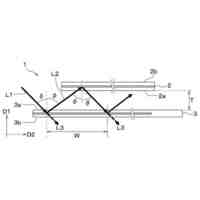
自車両の移動軌跡と対象物の位置の一例を示す説明図。
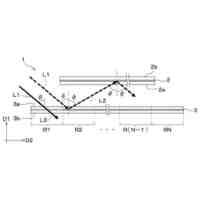
自車両の移動軌跡と対象物の位置の他の例を示す説明図。
衝突予測処理の手順を示すフローチャート。
【発明を実施するための形態】
【0009】
図1に示すように、本実施形態の車両50は、車両制御システム100を備える。車両制御システム100は、衝突予測装置200と、車両制御部300と、前方検出装置410と、後方検出装置420と、一般センサ類500と、を備える。本明細書において、車両50を「自車両50」とも呼ぶ。
【0010】
車両制御部300は、駆動部制御装置310と、ブレーキ制御装置320と、操舵角制御装置330とを含む。駆動部制御装置310は、車両50の車輪を駆動する駆動部(図示せず)を制御する機能を有する。車輪の駆動部としては、内燃機関と電動モータのうちの1つ以上の原動機を使用可能である。ブレーキ制御装置320は、車両50のブレーキ制御を実行する。ブレーキ制御装置320は、例えば電子制御ブレーキシステム(ECB)として構成される。操舵角制御装置330は、車両50の車輪の操舵角を制御する。「操舵角」とは、車両50の2つの前輪の平均操舵角を意味する。操舵角制御装置330は、例えば電動パワーステアリングシステム(EPS)として構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
電動機
10日前
株式会社デンソー
端子台
12日前
株式会社デンソー
ロータ
5日前
株式会社デンソー
ロータ
5日前
株式会社デンソー
電動弁
1か月前
株式会社デンソー
分離体
18日前
株式会社デンソー
光学部材
18日前
株式会社デンソー
整流回路
3日前
株式会社デンソー
光学部材
18日前
株式会社デンソー
電子装置
10日前
株式会社デンソー
光学部材
10日前
株式会社デンソー
電解装置
1か月前
株式会社デンソー
トランス
10日前
株式会社デンソー
熱交換器
1か月前
株式会社デンソー
制御装置
1か月前
株式会社デンソー
摺動機構
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
摺動機構
1か月前
株式会社デンソー
回転電機
3日前
株式会社デンソー
撮像装置
1か月前
株式会社デンソー
撮像装置
1か月前
株式会社デンソー
電気回路
26日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
電磁継電器
10日前
株式会社デンソー
半導体装置
18日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
センサ装置
1か月前
株式会社デンソーエレクトロニクス
電磁継電器
4日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
センサ装置
1か月前
株式会社デンソー
熱交換部材
1か月前
株式会社デンソートリム
鞍乗り車両
1か月前
株式会社デンソー
ヒータ装置
1か月前
株式会社デンソー
音低減装置
3日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ