TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025176496
公報種別
公開特許公報(A)
公開日
2025-12-04
出願番号
2024082684
出願日
2024-05-21
発明の名称
レーダ装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
G01S
17/34 20200101AFI20251127BHJP(測定;試験)
要約
【課題】距離の算出誤差を低減することができるレーダ装置を提供する。
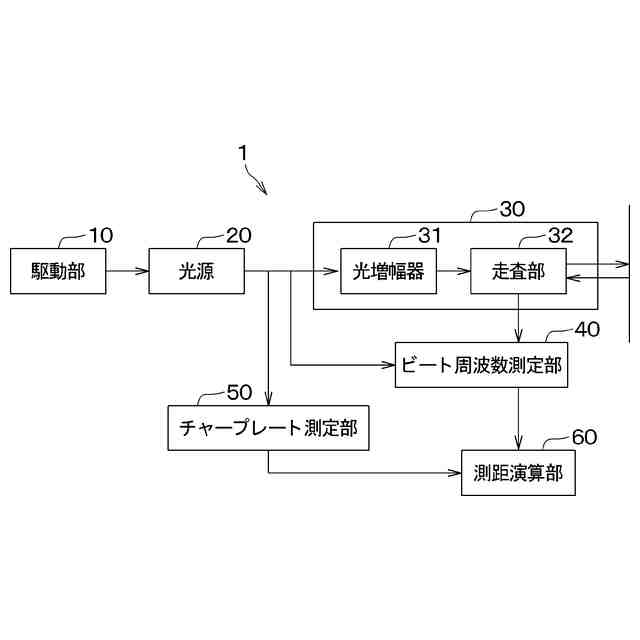
【解決手段】レーダ装置は、チャープ信号を含む光信号を出力する光源20と、光源20の出力信号を送信するとともに、光信号を受信して受信信号を生成する送受信部30と、出力信号と受信信号とを干渉させて第1ビート信号を生成し、第1ビート信号のビート周波数を測定するビート周波数測定部40と、出力信号のチャープレートを測定するチャープレート測定部50と、ビート周波数測定部40が測定したビート周波数、および、チャープレート測定部50が測定したチャープレートを用いて、物標との距離を算出する測距演算部60と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
レーダ装置であって、
チャープ信号を含む光信号を出力する光源(20)と、
前記光源の出力信号を送信するとともに、光信号を受信して受信信号を生成する送受信部(30)と、
前記出力信号と前記受信信号とを干渉させて第1ビート信号を生成し、前記第1ビート信号のビート周波数を測定するビート周波数測定部(40)と、
前記出力信号のチャープレートを測定するチャープレート測定部(50)と、
前記ビート周波数測定部が測定したビート周波数、および、前記チャープレート測定部が測定したチャープレートを用いて、物標との距離を算出する測距演算部(60)と、を備えるレーダ装置。
続きを表示(約 890 文字)
【請求項2】
前記出力信号の非線形性をプレディストーション法によって補正する駆動部(10)を備える請求項1に記載のレーダ装置。
【請求項3】
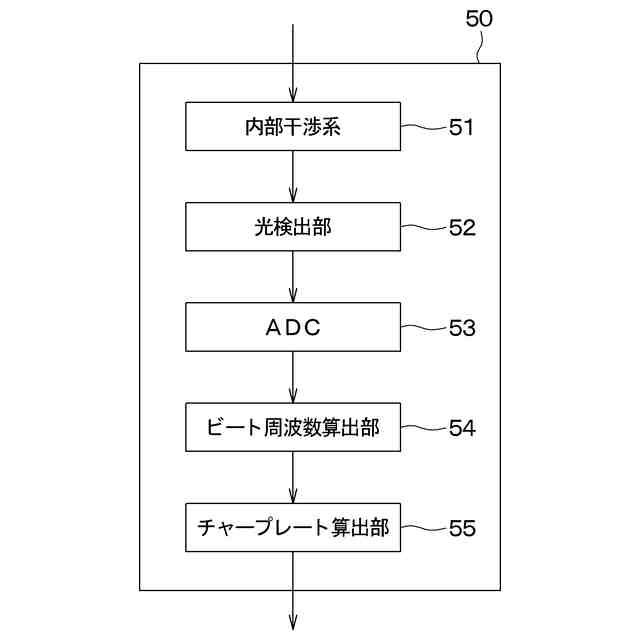
前記チャープレート測定部は、前記出力信号から光干渉信号を生成する内部干渉系(51)を備え、
前記光干渉信号を第2ビート信号に変換し、
前記第2ビート信号を周波数領域に変換してチャープレートを算出する請求項1に記載のレーダ装置。
【請求項4】
前記チャープレート測定部は、前記第2ビート信号を周波数領域に変換してビート周波数を算出し、該ビート周波数に基づいてチャープレートを算出する請求項3に記載のレーダ装置。
【請求項5】
前記チャープレート測定部は、前記第2ビート信号のFFT処理結果からチャープレートを算出する請求項3に記載のレーダ装置。
【請求項6】
前記チャープレート測定部は、前記第2ビート信号のゼロクロス点のサンプリング結果からチャープレートを算出する請求項3に記載のレーダ装置。
【請求項7】
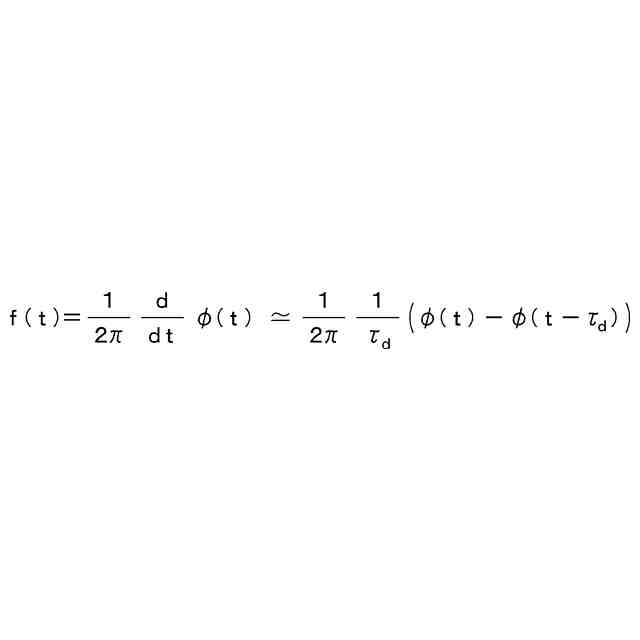
前記チャープレート測定部は、前記光干渉信号をIQ検波して生成された複素信号を前記第2ビート信号に変換し、前記第2ビート信号の瞬時周波数を算出する請求項3に記載のレーダ装置。
【請求項8】
前記チャープレート測定部は、前記瞬時周波数からチャープレートを算出する請求項7に記載のレーダ装置。
【請求項9】
前記内部干渉系は、前記出力信号と、前記出力信号を遅延させた遅延信号とを干渉させて前記光干渉信号を生成する自己遅延ヘテロダイン干渉系で構成されている請求項3に記載のレーダ装置。
【請求項10】
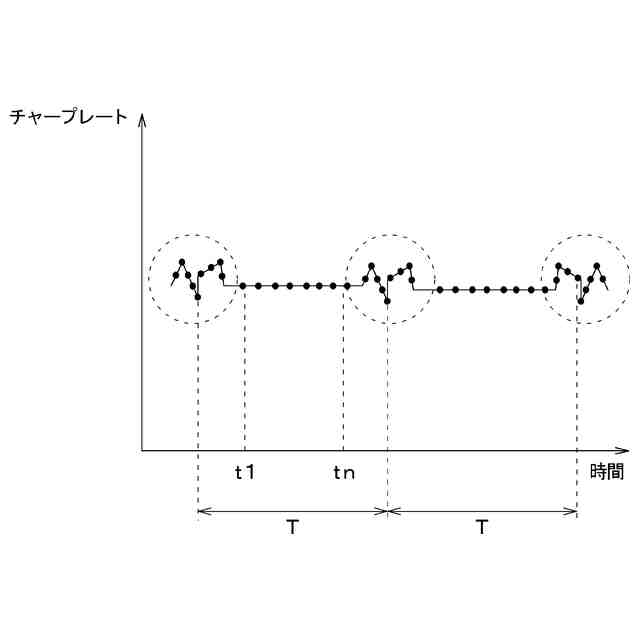
前記チャープ信号の周波数の掃引時間をTとして、
前記チャープレート測定部は、前記掃引時間T以内の時間で複数回チャープレートを測定し、複数の測定結果の時間平均を算出し、該算出した結果を前記測距演算部に入力する請求項1に記載のレーダ装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、レーダ装置に関するものである。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
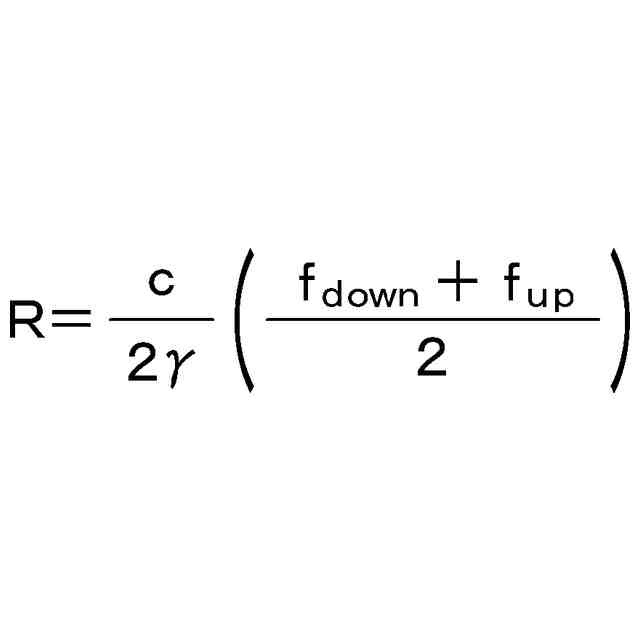
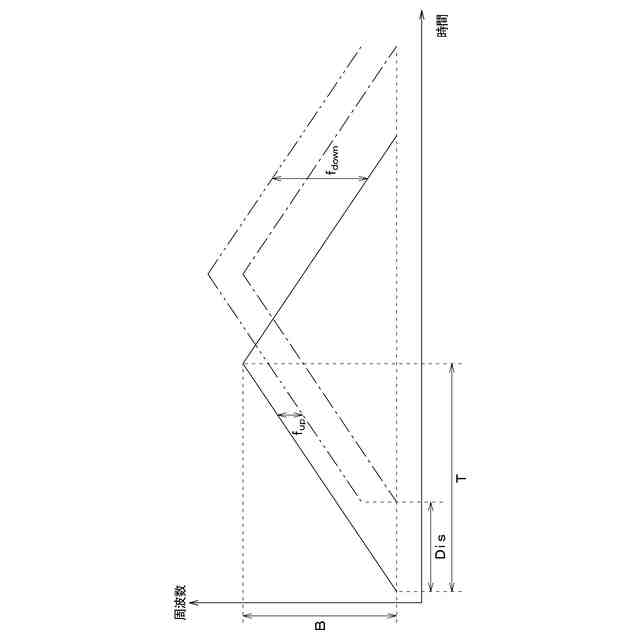
FMCW方式のLiDAR等のレーダ装置では、周波数が掃引されたチャープ信号を生成して外部に送信する。そして、ターゲットからの反射光と、元のチャープ信号とを干渉させてビート信号を生成する。さらに、レーダ装置とターゲットとの距離に応じて生じる送信信号と受信信号との周波数差をビート周波数として検出し、ビート周波数とチャープレートとに基づいて、レーダ装置とターゲットとの距離を算出する。このようなレーダ装置において距離を高精度に算出するためには、チャープレートを正確に把握する必要がある。FMCWは、Frequency Modulated Continuous Waveの略である。LiDARは、Light Detection And Rangingの略である。
【0003】
例えば非特許文献1では、プレディストーション法によって光源の出力信号を線形化し、チャープレートを正確に求められるようにする技術が提案されている。
【先行技術文献】
【非特許文献】
【0004】
Peng Li, Yating Zhang, Jianquan Yao, " Rapid Linear Frequency Swept Frequency-Modulated Continuous Wave Laser Source Using Iterative Pre-Distortion Algorithm", Remote Sens. 2022, 14, 3455
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、プレディストーション法は温度変化等の環境変化に対するロバスト性が低く、車載用途等では実際のチャープレートが設定値から乖離するため、距離の算出誤差が大きくなる。
【0006】
本開示は上記点に鑑みて、距離の算出誤差を低減することができるレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本開示の1つの観点によれば、レーダ装置は、チャープ信号を含む光信号を出力する光源(20)と、光源の出力信号を送信するとともに、光信号を受信して受信信号を生成する送受信部(30)と、出力信号と受信信号とを干渉させて第1ビート信号を生成し、第1ビート信号のビート周波数を測定するビート周波数測定部(40)と、出力信号のチャープレートを測定するチャープレート測定部(50)と、ビート周波数測定部が測定したビート周波数、および、チャープレート測定部が測定したチャープレートを用いて、物標との距離を算出する測距演算部(60)と、を備える。
【0008】
このように、光源の出力信号のチャープレートを測定し、測定したチャープレートを用いて距離を算出することにより、距離の算出精度のロバスト性が向上し、距離の算出誤差を低減することができる。
【0009】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
【0010】
第1実施形態にかかるレーダ装置の構成を示す図である。
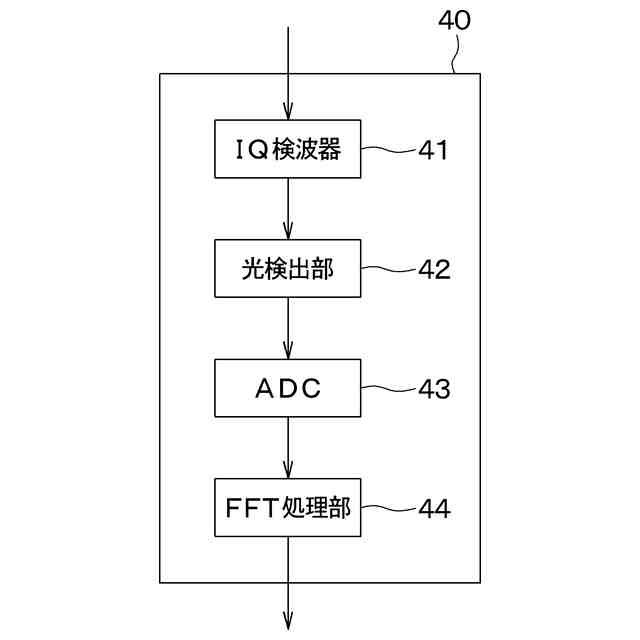
ビート周波数測定部の構成を示す図である。
送信信号および受信信号の周波数を示す図である。
チャープレート測定部の構成を示す図である。
チャープレートの算出誤差を示す図である。
距離の算出誤差を示す図である。
第2実施形態におけるチャープレート測定部の構成を示す図である。
ビート信号の振幅を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーウェーブ
筐体
1か月前
株式会社デンソー
分離体
14日前
株式会社デンソー
ロータ
1日前
株式会社デンソー
端子台
8日前
株式会社デンソー
電動弁
28日前
株式会社デンソー
回転機
1か月前
株式会社デンソー
電動機
6日前
株式会社デンソー
ロータ
1日前
株式会社デンソー
摺動機構
27日前
株式会社デンソー
トランス
6日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
光学部材
14日前
株式会社デンソー
摺動機構
27日前
株式会社デンソー
熱交換器
27日前
株式会社デンソー
制御装置
1か月前
株式会社デンソー
電解装置
29日前
株式会社デンソー
電子装置
28日前
株式会社デンソー
光学部材
6日前
株式会社デンソー
電子装置
6日前
株式会社デンソー
光学部材
14日前
株式会社デンソー
撮像装置
27日前
株式会社デンソー
電気回路
22日前
株式会社デンソー
撮像装置
27日前
株式会社デンソー
検出装置
1か月前
株式会社デンソー
電磁継電器
6日前
株式会社デンソー
センサ装置
1か月前
株式会社デンソーエレクトロニクス
電磁継電器
今日
株式会社デンソー
レーダ装置
今日
株式会社デンソー
電流センサ
1か月前
株式会社デンソー
センサ装置
1か月前
株式会社デンソー
半導体装置
27日前
株式会社デンソー
半導体装置
14日前
株式会社デンソー
ヒータ装置
1か月前
株式会社デンソートリム
鞍乗り車両
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ