TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025151505
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024052972
出願日
2024-03-28
発明の名称
車両制御装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社J-QuAD DYNAMICS
代理人
弁理士法人明成国際特許事務所
主分類
B60W
30/09 20120101AFI20251002BHJP(車両一般)
要約
【課題】自車両の走行条件に応じて、適切に衝突抑制装置を作動させることが課題であった。
【解決手段】車両に搭載される車両制御装置であって、車両は、車両の周囲の物体を検出する物体検出部と、車両の進行による車両と物体の衝突を抑制するように車両を制御する衝突抑制装置と、車両の前方の車線を規定している境界線を検出する車線検出部と、を備え、車両制御装置は、車線検出部によって検出された境界線に基づいて決定される車線の幅が、対面通行が許される車線の幅よりも小さい非対面通行路条件が満たされることを含む実行条件が満たされる場合、衝突抑制装置の作動を制限せず、非対面通行路条件が満たされないことを含む制限条件が満たされる場合、衝突抑制装置の作動を制限する制限制御を実行する、車両制御装置。
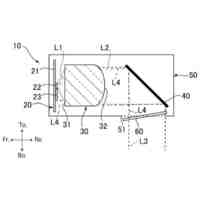
【選択図】図4
特許請求の範囲
【請求項1】
車両(10)に搭載される車両制御装置(100)であって、
前記車両は、前記車両の周囲の物体(Ob)を検出する物体検出部(200)と、前記車両の進行による前記車両と前記物体の衝突を抑制するように前記車両を制御する衝突抑制装置(400)と、前記車両の前方の車線(L)を規定している境界線(BL)を検出する車線検出部(300)と、を備え、
前記車両制御装置は、
前記車線検出部によって検出された境界線に基づいて決定される前記車線の幅(W)が、対面通行が許される車線の幅よりも小さい非対面通行路条件が満たされることを含む実行条件が満たされる場合、前記衝突抑制装置の作動を制限せず、
前記非対面通行路条件が満たされないことを含む制限条件が満たされる場合、前記衝突抑制装置の作動を制限する制限制御を実行する、車両制御装置。
続きを表示(約 440 文字)
【請求項2】
請求項1記載の車両制御装置であって、
前記車両は、さらに、前記車両の舵角とヨーレートの少なくとも一方の測定値を取得する第1取得部(500)、備え、
前記制限条件は、さらに、前記第1取得部により取得された測定値が、予め定められた第1舵角閾値よりも大きいことを含む、車両制御装置。
【請求項3】
請求項2記載の車両制御装置であって、
前記制限条件は、さらに、前記車両が停車した時点からの待機時間または加速時間が予め定められた時間閾値より大きいことを含む、車両制御装置。
【請求項4】
請求項3記載の車両制御装置であって、
前記実行条件は、さらに、前記非対面通行路条件が満たされた時点を始期に、前記車両の交差点(Is)への進入時から旋回開始に要する時間に基づく判定維持期間において、前記第1取得部により取得された測定値が、予め定められた第2舵角閾値よりも大きくなることを含む、車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
衝突抑制装置を搭載した車両制御装置において、特許文献1のように、自車両の旋回に応じて、衝突抑制装置を制御する技術がある。より具体的には、特許文献1の車両制御装置は、直進状態から旋回状態への推移を判定することにより、衝突抑制装置の不要作動を抑制する。なお、衝突抑制装置は、自車両の制動や運転者への警報などを自動的に作動させる。「不要作動」とは、衝突抑制装置の作動が不要な状況において衝突抑制装置が作動することを意味する。後に説明する「不作動」は、衝突抑制装置の作動が必要な状況において衝突抑制装置が作動しないことを意味する。
【先行技術文献】
【特許文献】
【0003】
特開2022-27066号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
発明者らは、直進状態から旋回状態への推移を判定することにより、交差点における車両の旋回時に衝突抑制装置を作動可能な状態にする車両制御装置を開発していた。なお、直進状態から旋回状態への推移は、例えば、車両の舵角やヨーレートに基づいて判定される。しかし、交差点に進入する前において車両のふらつきや旋回が発生する場合、車両が直進状態ではないと判定されることによって、交差点において衝突抑制装置の不作動が生じる可能性があった。なお、交差点に進入する前の車両のふらつきや旋回は、例えば、交差点に進入する前の車線変更や交差点に進入する前の道路に進入する場合に発生する。
【0005】
よって、自車両の走行条件に応じて、適切に衝突抑制装置を作動させることが課題であった。
【課題を解決するための手段】
【0006】
本開示は、以下の形態として実現することが可能である。
【0007】
本開示の一形態によれば、車両(10)に搭載される車両制御装置(100)が提供される。この車両制御装置において、前記車両は、前記車両の周囲の物体(Ob)を検出する物体検出部(200)と、前記車両の進行による前記車両と前記物体の衝突を抑制するように前記車両を制御する衝突抑制装置(400)と、前記車両の前方の車線(L)を規定している境界線(BL)を検出する車線検出部(300)と、を備え、前記車両制御装置は、前記車線検出部によって検出された境界線に基づいて決定される前記車線の幅(W)が、対面通行が許される車線の幅よりも小さい非対面通行路条件が満たされることを含む実行条件が満たされる場合、前記衝突抑制装置の作動を制限せず、前記非対面通行路条件が満たされないことを含む制限条件が満たされる場合、前記衝突抑制装置の作動を制限する制限制御を実行する。
【0008】
このような形態において、本開示の車両制御装置は、制限制御により、衝突抑制装置の作動を制限する。本開示の車両制御装置は、非対面通行路条件が満たされない場合において、衝突抑制装置の不要作動を抑制できる。さらに、非対面通行路条件が満たされる場合においては、本開示の車両制御装置は、不作動を抑制できる。よって、本開示の車両制御装置は、車両の走行条件に応じて、適切に衝突抑制装置を作動させることができる。
【図面の簡単な説明】
【0009】
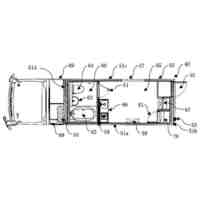
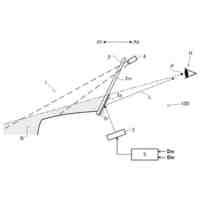
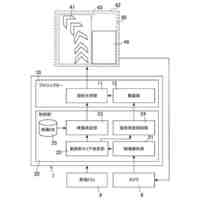
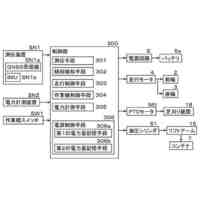
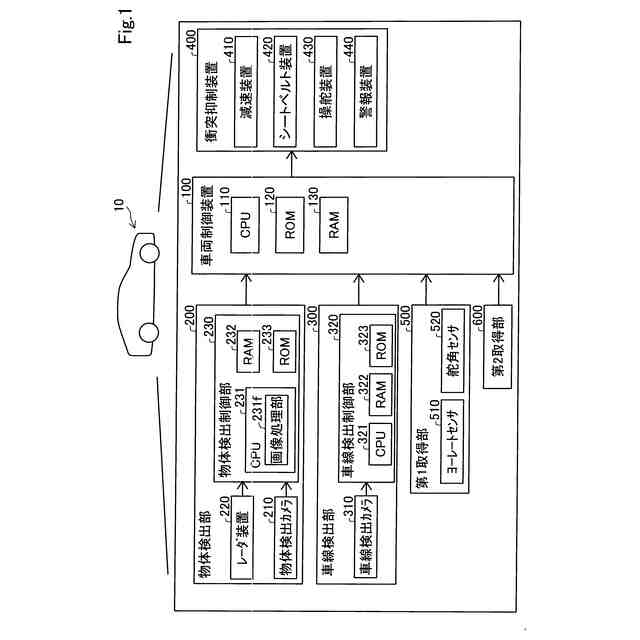
第1実施形態の構成を示す説明図である。
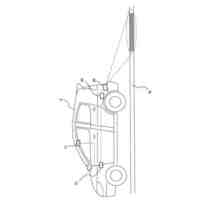
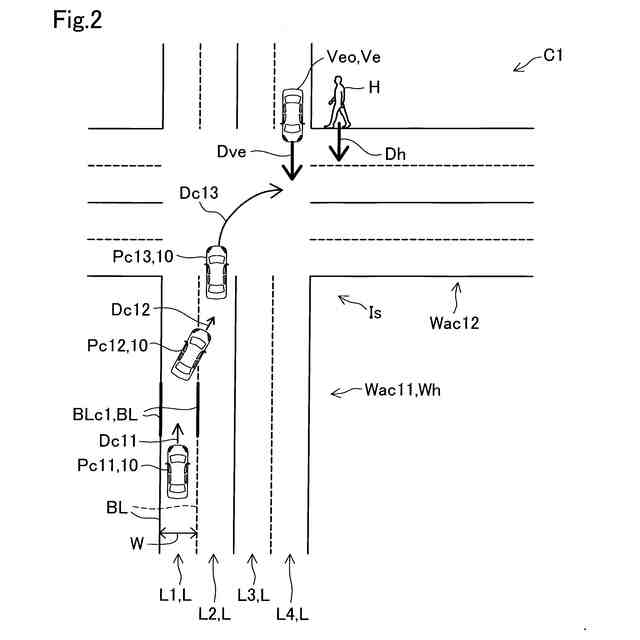
自車両の第1走行例を示す説明図である。
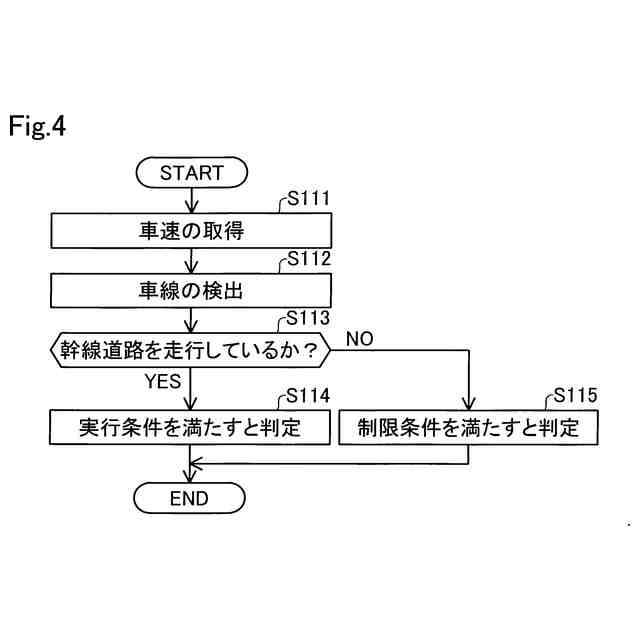
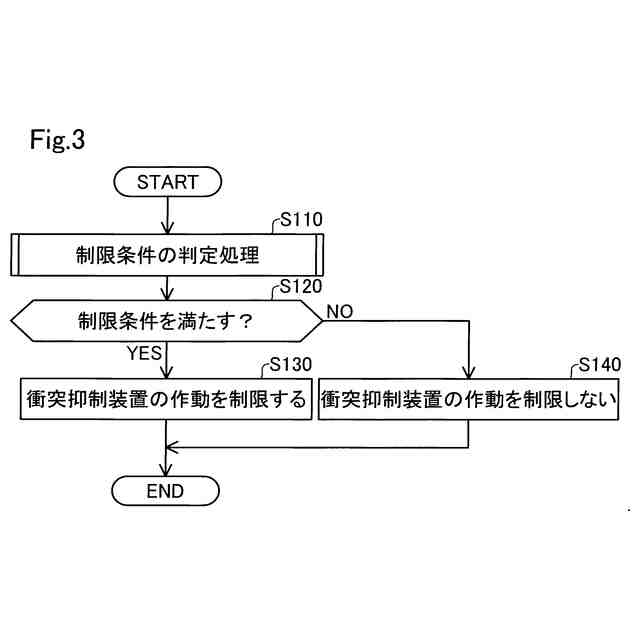
第1実施形態の車両制御装置の制御方法を示すフローチャートである。
第1実施形態の制限条件の判定処理を示すフローチャートである。
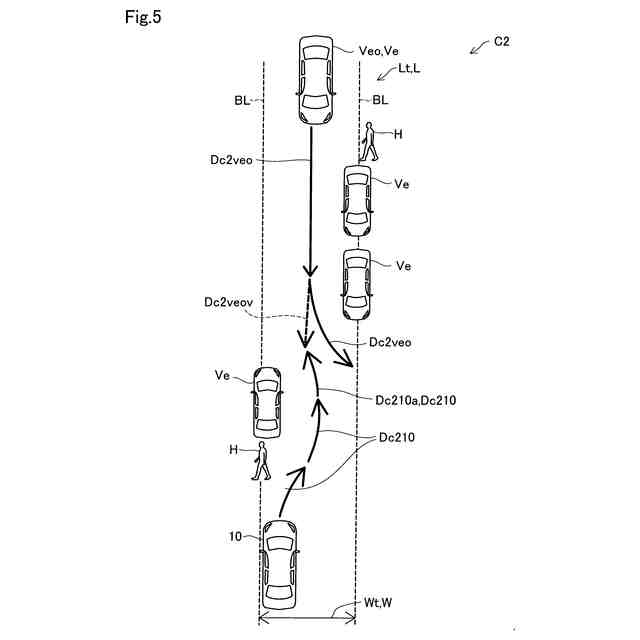
自車両の第2走行例を示す説明図である。
衝突抑制装置の作動の判定処理を示すフローチャートである。
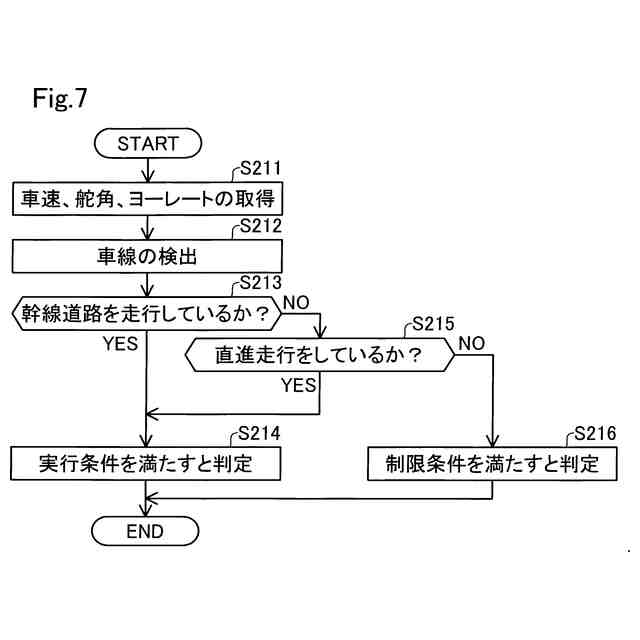
第2実施形態の制限条件の判定処理を示すフローチャートである。
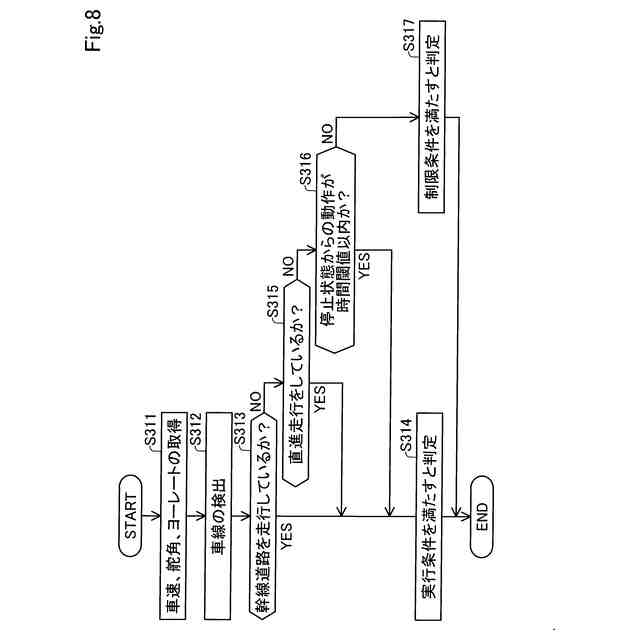
第3実施形態の制限条件の判定処理を示すフローチャートである。
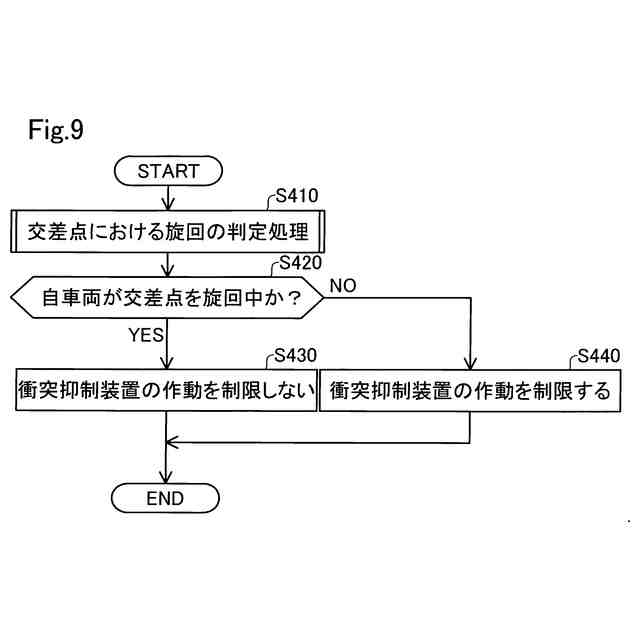
第4実施形態の車両制御装置の制御方法を示すフローチャートである。
交差点における旋回の判定処理を示すフローチャートである。
自車両の第4走行例を示す説明図である。
自車両の第5走行例を示す説明図である。
自車両の第6走行例を示す説明図である。
自車両の第7走行例を示す説明図である。
第5実施形態の車両制御装置の制御方法を示すフローチャートである。
【発明を実施するための形態】
【0010】
A.第1実施形態:
A-1.第1実施形態の構成:
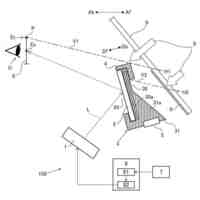
図1に示す車両制御装置100は、車両10に搭載される。車両10には、車両10を加速させるための駆動装置と、車両10の進行方向を変更するための操舵装置430と、車両10を減速させるための減速装置410と、が搭載されている。以下の説明において、車両10を、自車両10とも呼ぶ。また、自車両10以外の車両を、他の車両Veと呼ぶ。なお、図1では、技術の理解を容易にするために、駆動装置は、図示が省略されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
タイヤレバー
4か月前
個人
前輪キャスター
3か月前
個人
上部一体型自動車
2か月前
個人
タイヤ脱落防止構造
3か月前
個人
ルーフ付きトライク
4か月前
個人
空間形成装置
1か月前
日本精機株式会社
表示装置
4か月前
個人
マスタシリンダ
2か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
4か月前
個人
常設収納型サンバイザー
1か月前
日本精機株式会社
画像投映装置
2か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車載表示装置
2か月前
日本精機株式会社
車載表示装置
1か月前
個人
回転窓ワイパー装置
1か月前
株式会社ニフコ
収納装置
3か月前
株式会社豊田自動織機
産業車両
1か月前
日本精機株式会社
車室演出装置
3か月前
株式会社豊田自動織機
産業車両
4か月前
株式会社ニフコ
照明装置
3か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車両用報知装置
1か月前
極東開発工業株式会社
車両
4か月前
日本精機株式会社
車両用投射装置
2か月前
株式会社SUBARU
車両
2か月前
個人
音による速度計とプログラム
1か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
4か月前
日本精機株式会社
車両用投影装置
2か月前
個人
聴覚と触覚を利用する速度計
3日前
日本化薬株式会社
ガス発生器
2か月前
個人
段差通過を容易にする車輪構造
3か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ