TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025139607
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024038530
出願日
2024-03-13
発明の名称
レーダ装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
G01S
7/02 20060101AFI20250919BHJP(測定;試験)
要約
【課題】レーダ装置において、反射波の到来方向の推定精度の低下を抑制する。
【解決手段】レーダ装置1は、送信アンテナ130と、複数のアレーアンテナと、角度推定部332と、を備え、複数のアレーアンテナは、角度の推定精度特性が第1の推定精度特性となるように設定された第1の距離D1を空けて配置された2つのアレーアンテナのセットである第1のアンテナセットと、推定精度特性が第1の推定精度特性と異なる第2の推定精度特性となるように設定された第2の距離D2を空けて配置された2つのアレーアンテナのセットである第2のアンテナセットと、を含み、角度推定部は、第1のアンテナセットにより受信された受信信号を利用して推定された第1の推定結果と、第2のアンテナセットにより受信された受信信号を利用して推定された第2の推定結果と、を利用して、角度を推定する。
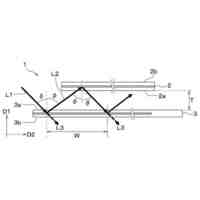
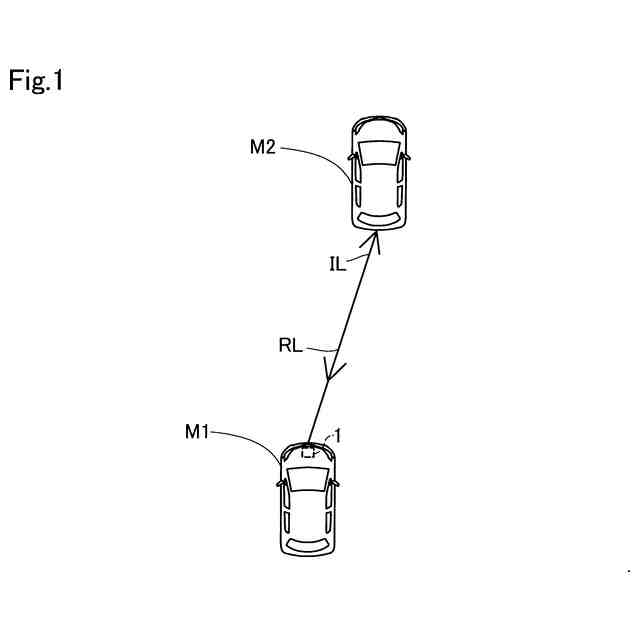
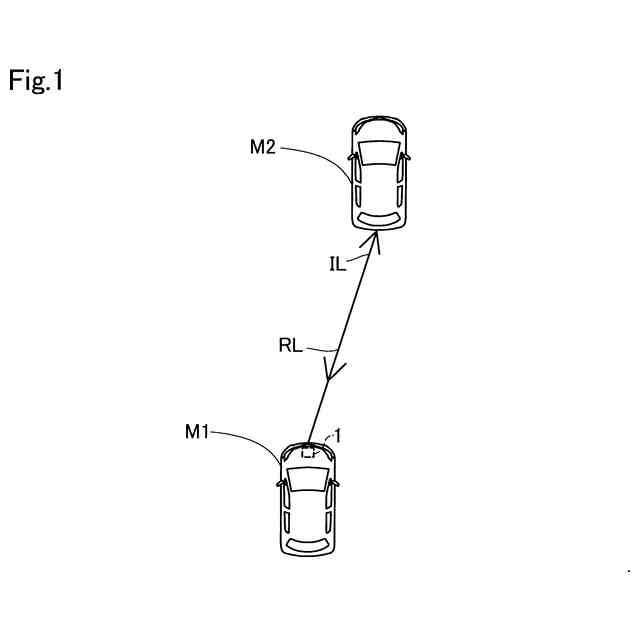
【選択図】図1
特許請求の範囲
【請求項1】
レーダ装置(1)であって、
送信波(IL)を電磁波として送信する送信アンテナ(130)と、
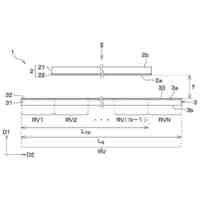
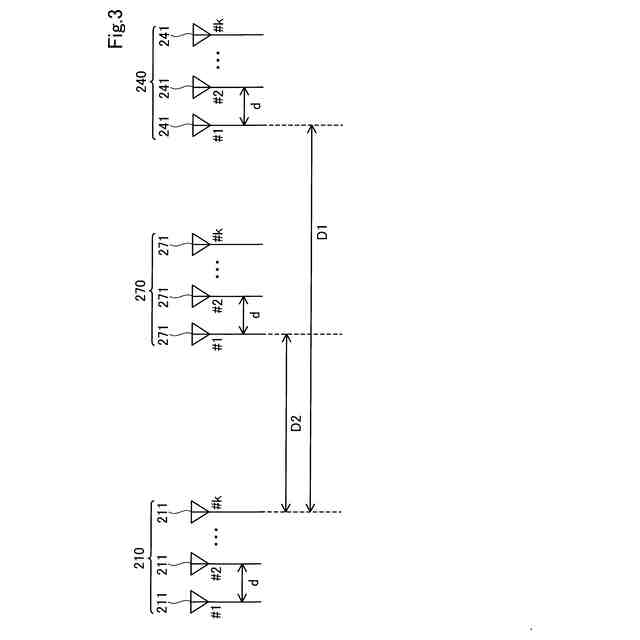
予め定められた配列方向に沿って直線状に等間隔に配置された複数のアンテナ素子(211、241、271)をそれぞれ有し、互いに前記配列方向に並んで配置された複数のアレーアンテナ(210、240、270)であって、前記電磁波が物標によって反射されて生じる反射波(RL)を受信信号として受信する複数のアレーアンテナと、
前記複数のアレーアンテナにより受信された前記受信信号を利用して、前記反射波の到来方向を示す角度を推定する角度推定部(332)と、
を備え、
前記複数のアレーアンテナは、前記角度の推定精度特性が第1の推定精度特性となるように設定された第1の距離(D1)を空けて配置された2つのアレーアンテナのセットである第1のアンテナセットと、前記推定精度特性が前記第1の推定精度特性と異なる第2の推定精度特性となるように設定された第2の距離(D2)を空けて配置された2つのアレーアンテナのセットである第2のアンテナセットと、を含み、
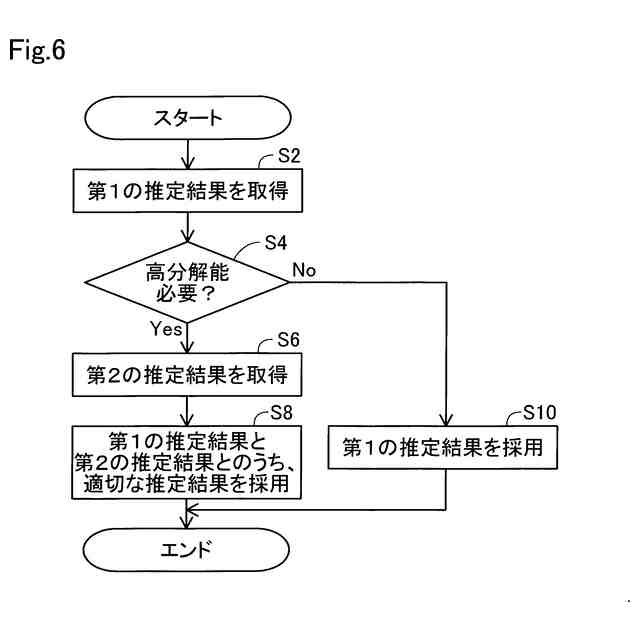
前記角度推定部は、前記第1のアンテナセットにより受信された前記受信信号を利用して推定された第1の推定結果と、前記第2のアンテナセットにより受信された前記受信信号を利用して推定された第2の推定結果と、を利用して、前記角度を推定する、
レーダ装置。
続きを表示(約 430 文字)
【請求項2】
請求項1に記載のレーダ装置であって、
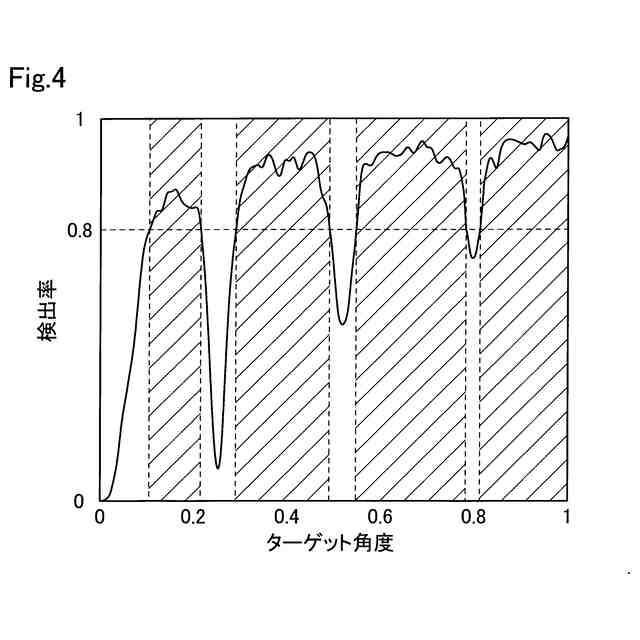
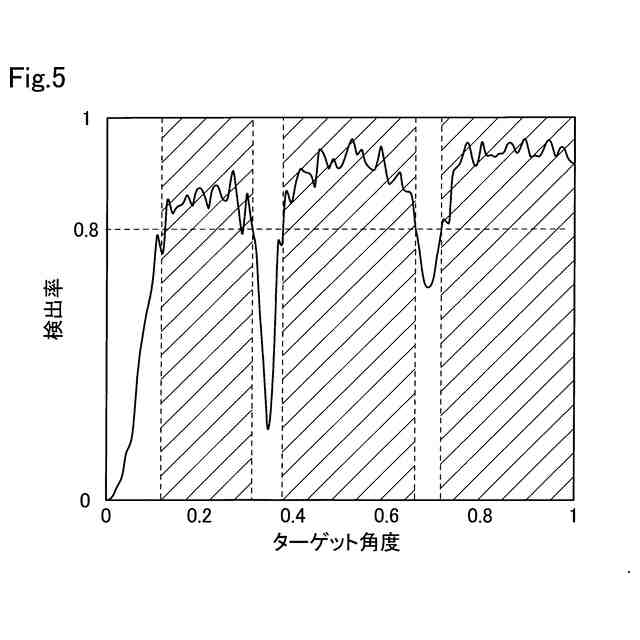
前記角度推定部は、前記第1の推定結果と前記第2の推定結果とのうち、ターゲット角度についての前記角度の推定精度が予め定められた閾値以上となる推定結果を参照して、前記角度を推定する、
レーダ装置。
【請求項3】
請求項1または請求項2に記載のレーダ装置であって、
前記第1の距離と前記第2の距離とは、一方が他方の整数倍ではない大きさである関係を有する、
レーダ装置。
【請求項4】
請求項3に記載のレーダ装置であって、
前記第2の距離に対する前記第1の距離の比率は、1.3+nから1.5+n(nは、0以上の整数)の範囲に属する、
レーダ装置。
【請求項5】
請求項1または請求項2に記載のレーダ装置であって、
前記角度推定部は、ESPRITを利用して前記角度を推定する、
レーダ装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、レーダ装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
物標による反射波を2つのアレーアンテナによりそれぞれ受信した受信信号を利用して、反射波の到来方向を示す角度を推定する技術が知られている(非特許文献1)。
【先行技術文献】
【非特許文献】
【0003】
Yan Ma et al. ” A Novel ESPRIT-Based Algorithm for DOA Estimation with Distributed Subarray Antenna”, Circuits Syst Signal Process 34, p.2951-2972, 2015
【発明の概要】
【発明が解決しようとする課題】
【0004】
発明者らは、2つのアレーアンテナを用いた角度推定では、特定の角度において、推定精度が低下し得るという問題を見出した。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の一形態によれば、レーダ装置(1)が提供される。このレーダ装置は、送信波(IL)を電磁波として送信する送信アンテナ(130)と、予め定められた配列方向に沿って直線状に等間隔に配置された複数のアンテナ素子(211、241、271)をそれぞれ有し、互いに前記配列方向に並んで配置された複数のアレーアンテナ(210、240、270)であって、前記電磁波が物標によって反射されて生じる反射波(RL)を受信信号として受信する複数のアレーアンテナと、前記複数のアレーアンテナにより受信された前記受信信号を利用して、前記反射波の到来方向を示す角度を推定する角度推定部(332)と、を備え、前記複数のアレーアンテナは、前記角度の推定精度特性が第1の推定精度特性となるように設定された第1の距離(D1)を空けて配置された2つのアレーアンテナのセットである第1のアンテナセットと、前記推定精度特性が前記第1の推定精度特性と異なる第2の推定精度特性となるように設定された第2の距離(D2)を空けて配置された2つのアレーアンテナのセットである第2のアンテナセットと、を含み、前記角度推定部は、前記第1のアンテナセットにより受信された前記受信信号を利用して推定された第1の推定結果と、前記第2のアンテナセットにより受信された前記受信信号を利用して推定された第2の推定結果と、を利用して、前記角度を推定する。
【0007】
この形態のレーダ装置によれば、複数のアレーアンテナは、第1の推定精度特性となるように配置された第1のアンテナセットと、第1の推定精度特性と異なる第2の推定精度特性となるように配置された第2のアンテナセットと、を含み、角度推定部は、第1の推定結果と第2の推定結果とを利用して角度を推定する。このため、互いに推定精度特性が異なる第1の推定結果と第2の推定結果とを使い分けることにより、角度推定における推定精度の低下を抑制できる。
【図面の簡単な説明】
【0008】
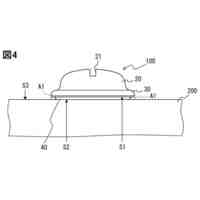
レーダ装置を搭載した自車両と他車両との位置関係を示す図である。
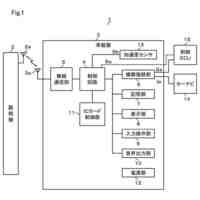
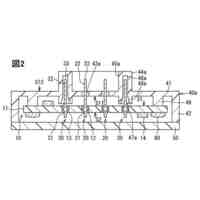
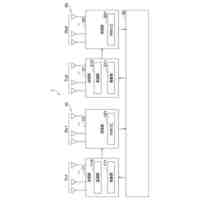
レーダ装置の概略構成を示すブロック図である。
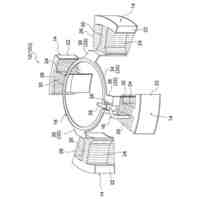
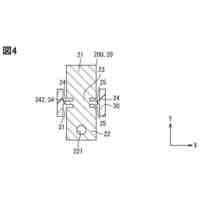
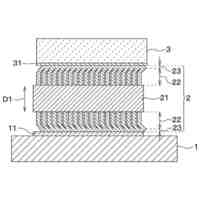
アレーアンテナの概略構成を示す説明図である。
第1の推定結果の推定精度特性を示す説明図である。
第2の推定結果の推定精度特性を示す説明図である。
角度推定処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
A.実施形態:
A-1.装置構成:
図1に示すように、実施形態にかかるレーダ装置1は、自車両M1に搭載される。レーダ装置1は、例えば、自車両M1のフロントグリル内に設置されている。レーダ装置1は、自車両M1の前方方向に存在する物標を検出する。本実施形態では、物標は、他車両M2である。より具体的には、レーダ装置1は、送信波ILとして電磁波を放射する。送信波ILは、自車両M1の外部の物標で反射して、反射波RLとなる。レーダ装置1は、反射波RLの到来方向を示す角度に基づいて、自車両M1に対して物標が存在する方向を検出する。なお、レーダ装置1は、自車両M1の前方方向に限らず、自車両M1の周囲の任意の方向に存在する物標を検出してもよい。
【0010】
図2に示すように、レーダ装置1は、送信部100と、受信部200と、処理部300とを備える。レーダ装置1はミリ波レーダである。実施形態においては、レーダ装置1はFMCW(Frequency Modulated Continuous Wave:周波数変調連続波)方式のレーダである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーウェーブ
筐体
1か月前
株式会社デンソー
車載器
1か月前
株式会社デンソー
回転機
1か月前
株式会社デンソー
電動弁
16日前
株式会社デンソー
分離体
2日前
株式会社デンソー
摺動機構
15日前
株式会社デンソー
反力装置
1か月前
株式会社デンソー
撮像装置
15日前
株式会社デンソー
撮像装置
15日前
株式会社デンソー
摺動機構
15日前
株式会社デンソー
検出装置
1か月前
株式会社デンソー
熱交換器
15日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
ねじ部材
1か月前
株式会社デンソー
電子装置
16日前
株式会社デンソー
制御装置
18日前
株式会社デンソー
電解装置
17日前
株式会社デンソー
電子装置
26日前
株式会社デンソー
電気回路
10日前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
光学部材
2日前
株式会社デンソー
光学部材
2日前
株式会社デンソー
電子装置
1か月前
株式会社デンソートリム
鞍乗り車両
24日前
株式会社デンソー
農業用装置
1か月前
株式会社デンソー
電流センサ
1か月前
株式会社デンソーテン
インバータ
1か月前
株式会社デンソー
半導体装置
15日前
株式会社デンソー
レーダ装置
1か月前
株式会社デンソー
半導体装置
2日前
株式会社デンソー
センサ装置
23日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
熱交換装置
1か月前
株式会社デンソー
ヒータ装置
24日前
株式会社デンソー
センサ装置
23日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ