TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025139145
公報種別
公開特許公報(A)
公開日
2025-09-26
出願番号
2024037928
出願日
2024-03-12
発明の名称
制御システム
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
B60W
50/04 20060101AFI20250918BHJP(車両一般)
要約
【課題】制御システムにおいて、所望の距離間隔で演算処理の演算結果を取得できなくなることを抑制する。
【解決手段】複数のプロセッサコアPC1~PC4と、異常診断部310と、複数のプロセッサコアのうちの一部に異常があると診断された場合に、異常コアに割当てられていた演算処理を、正常コアにおいて実行するように再割当てを実行する割当部320と、各プロセッサコアの異常の発生状況に対応して、移動上限を算出する移動上限演算部340と、移動上限以下の移動量関連パラメータで移動体を移動させるように、演算処理の演算結果を利用してアクチュエータを制御するアクチュエータ制御部420と、を備え、移動上限演算部は、再割当後処理周期が第1の周期である場合の移動上限が、割当後処理周期が第1の周期よりも短い第2の周期である場合の移動上限と比べて低くなるように、移動上限を算出する。
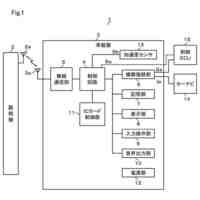
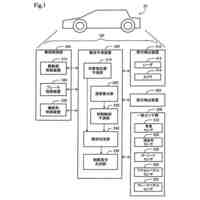
【選択図】図1
特許請求の範囲
【請求項1】
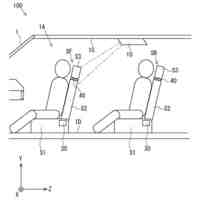
外部環境に関する情報である環境情報を利用して、移動体(V1)を移動させるためのアクチュエータ(40)を制御する制御システム(10)であって、
前記環境情報を利用して演算処理を実行する複数のプロセッサコア(PC1~PC4)と、
各前記プロセッサコアの異常の有無を診断する異常診断部(310)と、
前記複数のプロセッサコアのうちの一部に異常があると診断された場合に、異常があると診断された前記プロセッサコアである異常コアに割当てられていた前記演算処理を、異常がないと診断された前記プロセッサコアである正常コアにおいて実行するように、前記正常コアに対して前記演算処理を割り当てる再割当てを実行する割当部(320)と、
各前記プロセッサコアの異常の発生状況に対応して、前記移動体の移動量に関連するパラメータである移動量関連パラメータの許容上限である移動上限を算出する移動上限演算部(340)と、
前記移動上限以下の前記移動量関連パラメータで前記移動体を移動させるように、前記演算処理の演算結果を利用して前記アクチュエータを制御するアクチュエータ制御部(420)と、
を備え、
前記移動上限演算部は、前記再割当て後における前記演算処理の処理周期である割当後処理周期が第1の周期である場合の前記移動上限が、前記割当後処理周期が前記第1の周期よりも短い第2の周期である場合の前記移動上限と比べて低くなるように、前記移動上限を算出する、
制御システム。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の制御システムであって、
前記移動量関連パラメータは、前記移動体の移動速度を含み、
前記移動上限演算部は、前記移動上限として、前記移動速度の許容上限である速度上限を算出し、
前記アクチュエータ制御部は、前記速度上限以下の前記移動速度で前記移動体を移動させるように、前記演算処理の演算結果を利用して前記アクチュエータを制御し、
前記移動上限演算部は、前記割当後処理周期が前記第1の周期である場合の前記速度上限が、前記割当後処理周期が前記第2の周期である場合の前記速度上限と比べて低くなるように、前記速度上限を算出する、
制御システム。
【請求項3】
請求項2に記載の制御システムであって、
前記アクチュエータは、車両を走行させるためのアクチュエータであり、
前記移動上限演算部は、前記速度上限として、前記車両の走行速度の上限を算出する、
制御システム。
【請求項4】
請求項1から請求項3のいずれか一項に記載の制御システムであって、
前記割当後処理周期を算出する周期演算部(330)をさらに備え、
前記移動上限演算部は、前記割当後処理周期を利用して前記移動上限を算出する、
制御システム。
【請求項5】
請求項1から請求項3のいずれか一項に記載の制御システムであって、
前記複数のプロセッサコアは、前記演算処理として、ニューラルネットワークモデルを利用する演算処理を実行する、
制御システム。
【請求項6】
請求項1から請求項3のいずれか一項に記載の制御システムであって、
複数の前記正常コアに対して複数の前記演算処理を割り当てる場合、前記割当部は、前記演算処理ごとに予め設定された優先度のより高い前記演算処理を、各前記正常コアに割当てられた前記演算処理の処理時間の合計である合計処理時間がより小さい前記正常コアに対して割り当てるように、前記再割当てを実行する、
制御システム。
【請求項7】
請求項1から請求項3のいずれか一項に記載の制御システムであって、
複数の前記正常コアに対して複数の前記演算処理を割り当てる場合、前記割当部は、各前記正常コアに割当てられた前記演算処理の処理時間の合計である合計処理時間のうち、最大の合計処理時間である最大処理時間がより小さい割当てパターンとなるように、前記再割当てを実行する、
制御システム。
【請求項8】
請求項1から請求項3のいずれか一項に記載の制御システムであって、
前記割当部は、予め設定された割当てパターンに従って、前記再割当てを実行する、
制御システム。
【請求項9】
請求項1から請求項3のいずれか一項に記載の制御システムであって、
前記アクチュエータ制御部は、正常状態における前記演算処理の処理周期である正常時処理周期に対する前記割当後処理周期の比率である周期比率が予め定められた閾値よりも高い場合に、前記アクチュエータの制御を停止する、
制御システム。
【請求項10】
請求項1から請求項3のいずれか一項に記載の制御システムであって、
前記アクチュエータ制御部は、前記複数のプロセッサコアのうちの少なくともひとつにおいて異常が解消された場合、異常解消後の各前記プロセッサコアの異常の発生状況に対応して算出された前記移動上限以下の前記移動量関連パラメータで前記移動体を移動させるように前記アクチュエータを制御することを再開する、
制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御システムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、複数のプロセッサコアにおいて複数の演算処理を並列実行させるシステムが知られている(例えば、特許文献1)。特許文献1に記載の制御システムでは、複数のプロセッサコアの一部において異常が発生した場合、異常が発生したコアに割当てられていた演算処理を、異常が発生していない他のコアに再割当てすることにより、システムを継続させる。
【先行技術文献】
【特許文献】
【0003】
特開2008-305317号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、外部環境に関する情報である環境情報を利用して、移動体を移動させるためのアクチュエータを制御する制御システムにおいて特許文献1に記載の技術を利用した場合、演算処理を再割当てされたコアにおいて演算処理に要する時間が増大するので演算処理の実行中における移動体の移動量が増大し、所望の距離間隔で演算処理の演算結果を取得できなくなるおそれがある。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
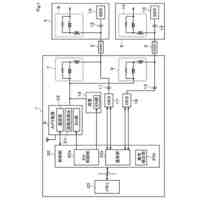
本開示の一形態によれば、外部環境に関する情報である環境情報を利用して、移動体(V1)を移動させるためのアクチュエータ(40)を制御する制御システム(10)が提供される。この制御システムは、前記環境情報を利用して演算処理を実行する複数のプロセッサコア(PC1~PC4)と、各前記プロセッサコアの異常の有無を診断する異常診断部(310)と、前記複数のプロセッサコアのうちの一部に異常があると診断された場合に、異常があると診断された前記プロセッサコアである異常コアに割当てられていた前記演算処理を、異常がないと診断された前記プロセッサコアである正常コアにおいて実行するように、前記正常コアに対して前記演算処理を割り当てる再割当てを実行する割当部(320)と、各前記プロセッサコアの異常の発生状況に対応して、前記移動体の移動量に関連するパラメータである移動量関連パラメータの許容上限である移動上限を算出する移動上限演算部(340)と、前記移動上限以下の前記移動量関連パラメータで前記移動体を移動させるように、前記演算処理の演算結果を利用して前記アクチュエータを制御するアクチュエータ制御部(420)と、を備え、前記移動上限演算部は、前記再割当て後における前記演算処理の処理周期である割当後処理周期が第1の周期である場合の前記移動上限が、前記割当後処理周期が前記第1の周期よりも短い第2の周期である場合の前記移動上限と比べて低くなるように、前記移動上限を算出する。
【0007】
この形態の制御システムによれば、割当後処理周期が第1の周期である場合の移動上限が、割当後処理周期が第1の周期よりも短い第2の周期である場合の移動上限と比べて低くなるように移動上限を算出し、移動上限以下の移動量関連パラメータで移動体を移動させるようにアクチュエータを制御する。このため、異常が発生し割当後処理周期が増大した場合には、移動体の移動量に関連するパラメータである移動量関連パラメータの許容上限を低減させることにより演算処理の実行中における移動体の移動量の増大を抑制でき、所望の距離間隔で演算処理の演算結果を取得できなくなることを抑制できる。
【0008】
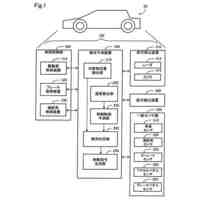
本開示の他の形態によれば、外部環境に関する情報である環境情報を利用して、移動体(V1)を移動させるためのアクチュエータ(40)を制御する制御システム(10a)が提供される。この制御システムは、前記環境情報を利用して演算処理を実行する複数のプロセッサコア(PC1~PC4)と、各前記プロセッサコアの異常の有無を診断する異常診断部(310)と、前記複数のプロセッサコアのうちの一部に異常があると診断された場合に、異常があると診断された前記プロセッサコアである異常コアに割当てられていた前記演算処理を、異常がないと診断された前記プロセッサコアである正常コアにおいて実行するように、前記正常コアに対して前記演算処理を割り当てる再割当てを実行する割当部(320)と、各前記プロセッサコアの異常の発生状況に対応して、前記再割当て後の前記正常コアの動作周波数である割当後動作周波数を算出する周波数演算部と、前記演算処理の演算結果を利用して前記アクチュエータを制御するアクチュエータ制御部(420)と、を備え、前記周波数演算部は、前記正常コアを利用して前記演算処理を実行する場合に要する処理時間と、前記複数のプロセッサコアのすべてを利用して前記演算処理を実行する場合に要する処理時間と、の差異がより小さくなるように、前記割当後動作周波数を算出し、前記複数のプロセッサコアのうちの一部に異常があると診断された場合、前記正常コアは、前記割当後動作周波数で前記演算処理を実行する。
【0009】
この形態の制御システムによれば、正常コアを利用して演算処理を実行する場合に要する処理時間と、複数のプロセッサコアのすべてを利用して演算処理を実行する場合に要する処理時間と、の差異がより小さくなるように割当後動作周波数を算出し、異常があると診断された場合、正常コアは、割当後動作周波数で演算処理を実行する。このため、異常コアの数が多く正常コアにおける演算処理の処理負荷が増大した場合であっても、演算処理に要する時間が増大することを抑制でき、所望の距離間隔で演算処理の演算結果を取得できなくなることを抑制できる。
【図面の簡単な説明】
【0010】
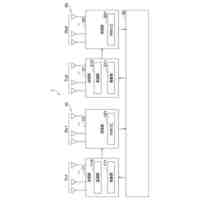
第1実施形態の制御システムの構成を示すブロック図である。
第1実施形態の異常対応処理の手順を示すフローチャートである。
第2実施形態の制御システムの構成を示すブロック図である。
第2実施形態の異常対応処理の手順を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーウェーブ
筐体
5日前
株式会社デンソー
回転機
5日前
株式会社デンソー
車載器
18日前
株式会社デンソー
ステータ
18日前
株式会社デンソー
ステータ
18日前
株式会社デンソー
反力装置
12日前
株式会社デンソー
電子装置
12日前
株式会社デンソーエレクトロニクス
発音装置
22日前
株式会社デンソー
電子装置
22日前
株式会社デンソー
電子装置
13日前
株式会社デンソー
ねじ部材
18日前
株式会社デンソー
検出装置
4日前
株式会社デンソーテン
インバータ
12日前
株式会社デンソー
電流センサ
5日前
株式会社デンソー
農業用装置
14日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
半導体装置
今日
株式会社デンソー
レーダ装置
22日前
株式会社デンソー
半導体装置
18日前
株式会社デンソーテン
車載映像装置
18日前
株式会社デンソー
電子制御装置
22日前
株式会社デンソー
車両制御装置
12日前
株式会社デンソー
電気化学セル
22日前
株式会社デンソー
車載システム
12日前
株式会社デンソー
車載システム
12日前
株式会社デンソー
通信システム
22日前
株式会社デンソー
衝突予測装置
13日前
株式会社デンソー
電波吸収装置
22日前
株式会社デンソー
電子制御装置
18日前
株式会社デンソーエアクール
換気空調装置
19日前
株式会社デンソー
電力変換装置
18日前
株式会社デンソー
運転支援装置
13日前
株式会社デンソー
衝突予測装置
13日前
株式会社デンソー
電力変換装置
14日前
株式会社デンソー
電圧検出回路
14日前
株式会社デンソー
運航管理装置
11日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ