TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025158563
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2024061226
出願日
2024-04-05
発明の名称
制御支援装置、制御支援方法、及びプログラム
出願人
富士電機株式会社
代理人
個人
,
個人
主分類
G05B
23/02 20060101AFI20251009BHJP(制御;調整)
要約
【課題】目標とする制御性能を達成できるバッチプロセス制御を実現可能とすること。
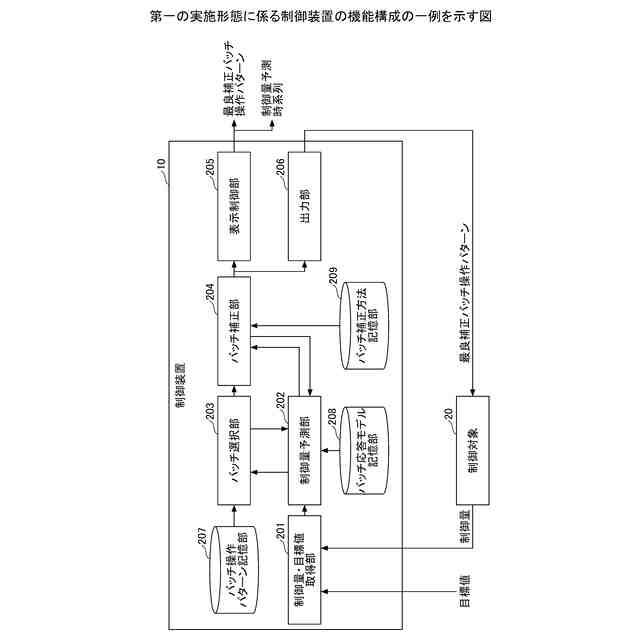
【解決手段】本開示の一態様による制御支援装置は、バッチプロセスを実行する対象の制御を支援する制御支援装置であって、前記対象から出力された制御量と、前記制御量に対する目標値とを取得する取得部と、前記制御量と、前記対象の操作量と制御量との関係を表すモデルと、前記操作量の時系列を表す操作パターンとに基づいて、前記制御量よりも未来の制御量の時系列を表す第1の制御量予測時系列を計算する予測部と、前記第1の制御量予測時系列と、前記目標値とに基づいて、複数の前記操作パターンの中から最良の操作パターンを選択する選択部と、前記目標値に基づいて、前記最良の操作パターンを1以上の補正方法によりそれぞれ補正した1以上の補正操作パターンの中から、最良の補正操作パターンを選択する補正部と、を有する。
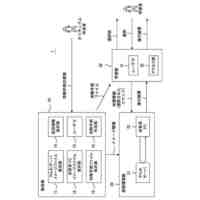
【選択図】図2
特許請求の範囲
【請求項1】
バッチプロセスを実行する対象の制御を支援する制御支援装置であって、
前記対象から出力された制御量と、前記制御量に対する目標値とを取得する取得部と、
前記制御量と、前記対象の操作量と制御量との関係を表すモデルと、前記操作量の時系列を表す操作パターンとに基づいて、前記制御量よりも未来の制御量の時系列を表す第1の制御量予測時系列を計算する予測部と、
前記第1の制御量予測時系列と、前記目標値とに基づいて、複数の前記操作パターンの中から最良の操作パターンを選択する選択部と、
前記目標値に基づいて、前記最良の操作パターンを1以上の補正方法によりそれぞれ補正した1以上の補正操作パターンの中から、最良の補正操作パターンを選択する補正部と、
を有する制御支援装置。
続きを表示(約 1,400 文字)
【請求項2】
前記予測部は、
前記制御量と、前記モデルと、前記補正操作パターンとに基づいて、前記制御量よりも未来の制御量の時系列を表す第2の制御量予測時系列を計算し、
前記補正部は、
前記第2の制御量予測時系列と、前記目標値とに基づいて、前記1以上の補正操作パターンの中から、前記最良の補正操作パターンを選択する、請求項1に記載の制御支援装置。
【請求項3】
前記選択部は、
前記第1の制御量予測時系列のバッチ終了時点における制御量が前記目標値に最も近い前記操作パターン、又は、前記バッチ終了時点における制御量が前記目標値に最も近く、かつ、前記バッチ終了時点における制御量が前記目標値を超えない前記操作パターンを、前記最良の操作パターンとして選択する、請求項1に記載の制御支援装置。
【請求項4】
前記補正部は、
前記第2の制御量予測時系列のバッチ終了時点における制御量が前記目標値に最も近い前記補正操作パターン、又は、前記バッチ終了時点における制御量が前記目標値に最も近く、かつ、前記バッチ終了時点における制御量が前記目標値を超えない前記補正操作パターンを、前記最良の補正操作パターンとして選択する、請求項2に記載の制御支援装置。
【請求項5】
前記最良の補正操作パターンと、前記最良の補正操作パターンに対応する前記第2の制御量予測時系列とを表示させる表示制御部を有する請求項2又は4に記載の制御支援装置。
【請求項6】
前記最良の補正操作パターンを前記対象に出力する出力部を有する請求項1に記載の制御支援装置。
【請求項7】
前記1以上の補正方法には、
前記最良の操作パターンのバッチ開始時刻からバッチ終了時刻までの操作量の時系列を前又は後に所定の時間スライドさせる補正方法と、
前記最良の操作パターンのバッチ終了時刻を前又は後に所定の時間ずらす補正方法と、
が含まれる、請求項1に記載の制御支援装置。
【請求項8】
前記モデルは、
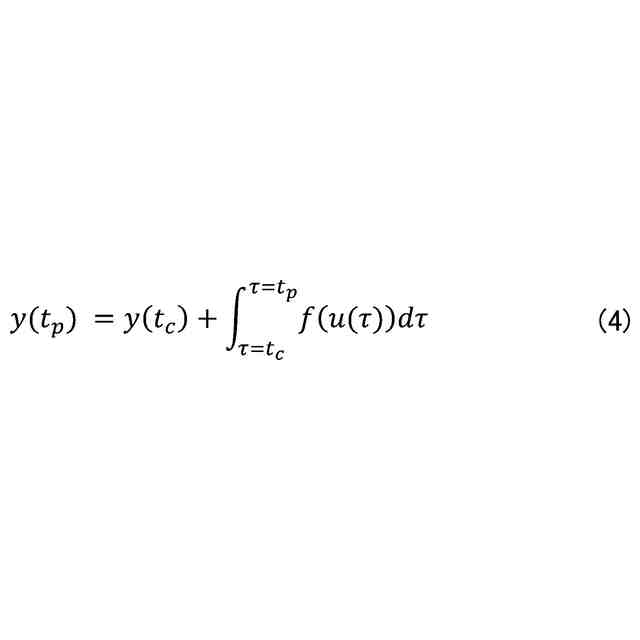
前記取得部によって取得された前記制御量と、少なくとも操作量を所定の関数で変換した値の積分値との和により、各予測対象時刻における制御量を計算する、請求項1に記載の制御支援装置。
【請求項9】
前記取得部は、
予め決められた所定の周期毎に、前記制御量を取得し、
前記予測部は、
前記周期毎に、前記制御量と、前記モデルと、前記補正操作パターンとに基づいて、前記第2の制御量予測時系列を計算し、
前記補正部は、
前記第2の制御量予測時系列と、前記目標値とに基づいて、前記最良の操作パターンのうちの現在時刻よりも未来の操作量の時系列を表す対象操作パターンを前記1以上の補正方法によりそれぞれ補正した1以上の補正操作パターンの中から、最良の補正操作パターンを選択する、請求項2に記載の制御支援装置。
【請求項10】
前記1以上の補正方法には、
前記最良の補正パターンの現在時刻からバッチ終了時刻までの操作量の時系列を前又は後に所定の時間スライドさせる補正方法と、
前記最良の操作パターンのバッチ終了時刻を前又は後に所定の時間ずらす補正方法と、
が含まれる、請求項9に記載の制御支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御支援装置、制御支援方法、及びプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
バッチプロセスでは、バッチ毎に同じ処理が繰り返されるという特徴がある。このため、バッチプロセスのパラメータ同定とそのパラメータを利用したプロセス制御とを行う際に、前回処理の情報を次回処理にも利用する技術が知られている(例えば、特許文献1)。また、バッチプロセスのプロセス制御を行う際に、ゴールデンバッチと呼ばれる過去の最良のバッチ操作パターンを利用することも行われている。
【先行技術文献】
【特許文献】
【0003】
特開昭63-191202号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、様々な要因(例えば、プラントの現在の状態や外乱条件、設備の特性変化等といった要因)によって、必ずしも目標とする制御性能がゴールデンバッチにより達成できるとは限らない。
【0005】
本開示は、上記の点に鑑みてなされたもので、目標とする制御性能を達成できるバッチプロセス制御を実現可能とすることを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様による制御支援装置は、バッチプロセスを実行する対象の制御を支援する制御支援装置であって、前記対象から出力された制御量と、前記制御量に対する目標値とを取得する取得部と、前記制御量と、前記対象の操作量と制御量との関係を表すモデルと、前記操作量の時系列を表す操作パターンとに基づいて、前記制御量よりも未来の制御量の時系列を表す第1の制御量予測時系列を計算する予測部と、前記第1の制御量予測時系列と、前記目標値とに基づいて、複数の前記操作パターンの中から最良の操作パターンを選択する選択部と、前記目標値に基づいて、前記最良の操作パターンを1以上の補正方法によりそれぞれ補正した1以上の補正操作パターンの中から、最良の補正操作パターンを選択する補正部と、を有する。
【発明の効果】
【0007】
目標とする制御性能を達成できるバッチプロセス制御が実現可能となる。
【図面の簡単な説明】
【0008】
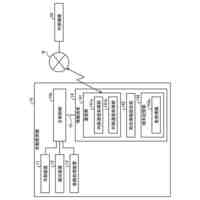
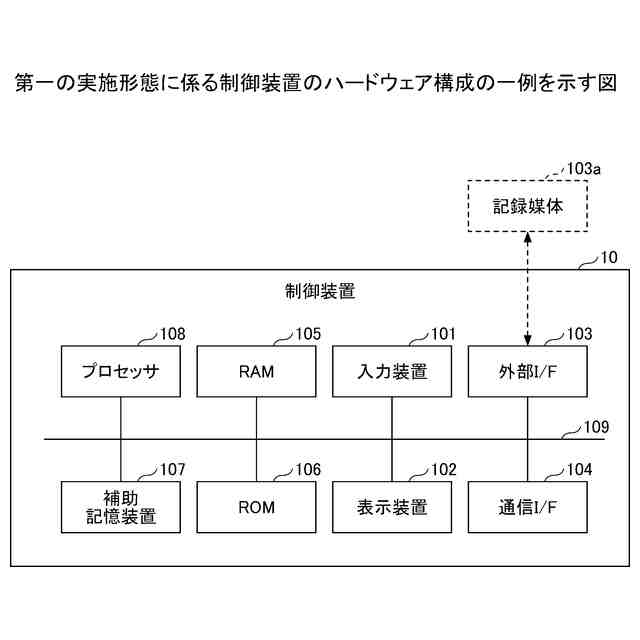
第一の実施形態に係る制御装置のハードウェア構成の一例を示す図である。
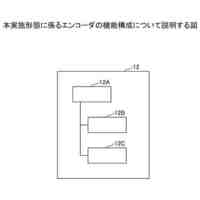
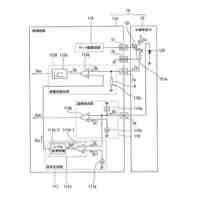
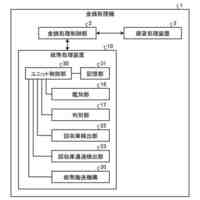
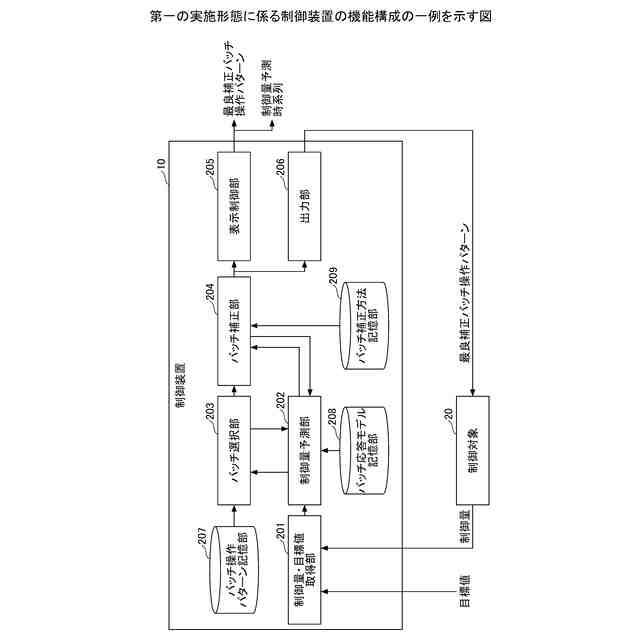
第一の実施形態に係る制御装置の機能構成の一例を示す図である。
1番目~n番目のバッチ操作パターンの一例を示す図である。
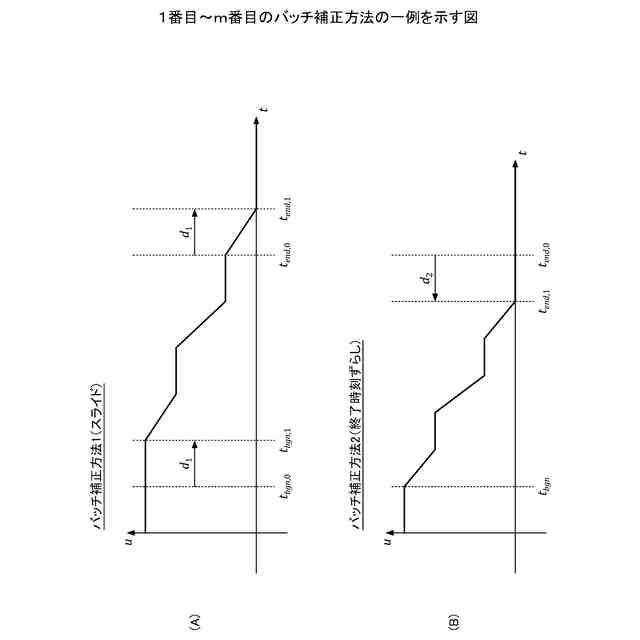
1番目~m番目のバッチ補正方法の一例を示す図である。
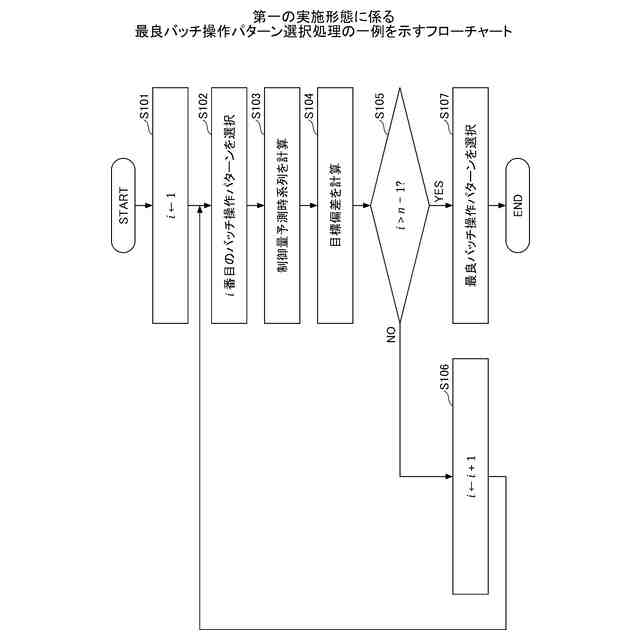
第一の実施形態に係る最良バッチ操作パターン選択処理の一例を示すフローチャートである。
目標偏差の一例を示す図である。
第一の実施形態に係るバッチ補正処理の一例を示すフローチャートである。
第二の実施形態に係る制御装置の機能構成の一例を示す図である。
m+1番目~m+m'番目のバッチ補正方法の一例を示す図である。
第二の実施形態に係るバッチ補正処理の一例を示すフローチャートである。
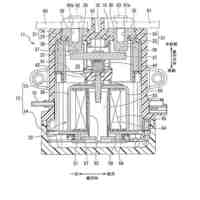
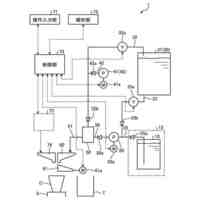
一実施例に係る制御対象を模式的に示す図である。
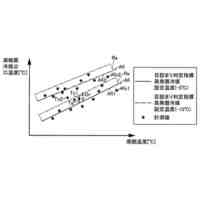
一実施例に係る制御対象の入力バルブの弁特性を示す図である。
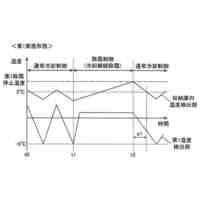
一実施例に係るバッチ操作パターン、CV値、制御量及び目標値を示す図である。
一実施例に係る最良バッチ操作パターンに対する補正を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の第一及び第二の実施形態について、図面を参照しながら詳細に説明する。以下の第一及び第二の実施形態では、バッチプロセスを実行するプラント等を制御対象20として、その制御対象20が目標とする制御性能を達成できるバッチプロセス制御を実現する制御装置10について説明する。なお、バッチプロセスを実行するプラントの具体例としては、例えば、鉄鋼、鋳造、食品、半導体等の分野の製造プロセスを実行するプラント等が挙げられる。ただし、制御対象20がプラントであることは一例であって、制御対象20は、バッチプロセスを実行する機器、装置、設備等であればプラントに限られるものではない。
【0010】
ここで、バッチプロセスでは、バッチと呼ばれる単位毎に同一の処理が繰り返される。以下、バッチプロセスに含まれるバッチ単位の各処理のことを「バッチ処理」と呼ぶことにする。また、バッチプロセスには少なくとも1以上のバッチ処理が含まれているものとする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
富士電機株式会社
駆動回路
1か月前
富士電機株式会社
冷却装置
10日前
富士電機株式会社
集積回路
10日前
富士電機株式会社
エンコーダ
2か月前
富士電機株式会社
半導体装置
11日前
富士電機株式会社
電磁接触器
2か月前
富士電機株式会社
回路遮断器
2か月前
富士電機株式会社
電磁接触器
2か月前
富士電機株式会社
パネル構造
10日前
富士電機株式会社
パネル構造
10日前
富士電機株式会社
半導体装置
2か月前
富士電機株式会社
電磁接触器
18日前
富士電機株式会社
自動販売機
1か月前
富士電機株式会社
電磁接触器
2か月前
富士電機株式会社
半導体装置
1か月前
富士電機株式会社
半導体装置
3日前
富士電機株式会社
半導体装置
24日前
富士電機株式会社
電磁接触器
2か月前
富士電機株式会社
電磁接触器
2か月前
富士電機株式会社
自動販売機
11日前
富士電機株式会社
学習システム
1か月前
富士電機株式会社
硬貨処理装置
1か月前
富士電機株式会社
硬貨処理装置
1か月前
富士電機株式会社
飲料供給装置
10日前
富士電機株式会社
ショーケース
2か月前
富士電機株式会社
商品収納装置
2か月前
富士電機株式会社
自動販売装置
1か月前
富士電機株式会社
電力変換装置
3日前
富士電機株式会社
電力変換装置
3日前
富士電機株式会社
紙幣処理装置
3日前
富士電機株式会社
飲料抽出装置
1か月前
富士電機株式会社
金銭処理装置
1か月前
富士電機株式会社
半導体モジュール
1か月前
富士電機株式会社
チャンネルベース
2か月前
富士電機株式会社
半導体モジュール
1か月前
富士電機株式会社
半導体モジュール
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ