TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025153620
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024056180
出願日
2024-03-29
発明の名称
情報処理装置、情報処理システムおよび情報処理方法
出願人
株式会社リコー
代理人
弁理士法人酒井国際特許事務所
主分類
B66F
9/24 20060101AFI20251002BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】複数の物体を同時に移動体で搬送する場合に、複数の物体の搬送状態(保持/非保持)を認識する。
【解決手段】画像を撮像する撮像部と、複数の物体を保持することが可能な保持部とを有する移動体により移動される物体の位置情報を処理する情報処理装置であって、前記撮像部により前記移動体の周囲が撮像された画像に基づいて、前記移動体の位置情報を取得する移動体位置取得部と、前記撮像部により前記保持部が撮像された画像に基づいて、前記移動体による前記物体の保持又は非保持の何れか一方の状態を取得する保持情報取得部と、前記移動体位置取得部が取得した前記移動体の位置情報と、前記保持情報取得部が取得した状態とに基づいて、前記物体の位置情報を取得する物体位置取得部と、を備え、前記保持情報取得部は、前記物体の保持時および前記物体の保持前後における前記保持部に対する前記物体の距離を算出して、前記移動体による2つ目以降の前記物体の保持又は非保持の何れか一方の状態を確定する。
【選択図】図1
特許請求の範囲
【請求項1】
画像を撮像する撮像部と、複数の物体を保持することが可能な保持部とを有する移動体により移動される物体の位置情報を処理する情報処理装置であって、
前記撮像部により前記移動体の周囲が撮像された画像に基づいて、前記移動体の位置情報を取得する移動体位置取得部と、
前記撮像部により前記保持部が撮像された画像に基づいて、前記移動体による前記物体の保持又は非保持の何れか一方の状態を取得する保持情報取得部と、
前記移動体位置取得部が取得した前記移動体の位置情報と、前記保持情報取得部が取得した状態とに基づいて、前記物体の位置情報を取得する物体位置取得部と、
を備え、
前記保持情報取得部は、前記物体の保持時および前記物体の保持前後における前記保持部に対する前記物体の距離を算出して、前記移動体による2つ目以降の前記物体の保持又は非保持の何れか一方の状態を確定する、
ことを特徴とする情報処理装置。
続きを表示(約 970 文字)
【請求項2】
前記保持情報取得部は、前記物体の保持時および前記物体の保持前後における前記保持部に対する前記物体の距離を算出して、前記移動体による2つ目以降の前記物体が保持状態であることを推定する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記保持情報取得部は、前記物体の保持時および前記物体の保持前後における前記保持部に対する前記物体の距離を算出して、前記移動体による2つ目以降の前記物体が非保持状態であることを推定する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記保持情報取得部は、前記物体の保持時および前記物体の保持前後における前記保持部に対する前記物体の距離を算出して、前記移動体による2つ目以降の前記物体の段積み状態を確定する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項5】
移動体と、
前記移動体に取り付けられた少なくとも一つの撮像装置と、
請求項1ないし4のいずれか一項に記載の情報処理装置と、
を備えることを特徴とする情報処理システム。
【請求項6】
画像を撮像する撮像部と、複数の物体を保持することが可能な保持部とを有する移動体により移動される物体の位置情報を処理する情報処理装置による情報処理方法であって、
前記撮像部により前記移動体の周囲が撮像された画像に基づいて、前記移動体の位置情報を取得する移動体位置取得ステップと、
前記撮像部により前記保持部が撮像された画像に基づいて、前記移動体による前記物体の保持又は非保持の何れか一方の状態を取得する保持情報取得ステップと、
前記移動体位置取得ステップで取得した前記移動体の位置情報と、前記保持情報取得ステップで取得した状態とに基づいて、前記物体の位置情報を取得する物体位置取得ステップと、
を含み、
前記保持情報取得ステップは、前記物体の保持時および前記物体の保持前後における前記保持部に対する前記物体の距離を算出して、前記移動体による2つ目以降の前記物体の保持又は非保持の何れか一方の状態を確定する、
ことを特徴とする情報処理方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理システムおよび情報処理方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、フォークリフト等の移動体により搬送される貨物又はパレット等の物体の位置情報を処理する情報処理装置が知られている。
【0003】
特許文献1には、移動体に取り付けたカメラにより撮像された画像によって移動体の位置情報を推定し、さらに移動体により移動される物体(貨物またはパレット)の搬送状態(保持/非保持)の認識を行うことで、物体の位置情報を取得する技術が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術によれば、移動体に設けられた物体を保持する保持部であるフォークの根元側と先端側とに保持した2つの物体を移動体で搬送する場合に、フォークの先端側に位置する物体がフォークの根元側に位置する物体に隠れてしまうことで、移動体に取り付けたカメラからフォークの先端側の物体を撮像することができず、フォークの先端側の物体の搬送状態(保持/非保持)の認識ができないという問題があった。
【0005】
本発明は、上記に鑑みてなされたものであって、複数の物体を同時に移動体で搬送する場合に、複数の物体の搬送状態(保持/非保持)を認識することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明は、画像を撮像する撮像部と、複数の物体を保持することが可能な保持部とを有する移動体により移動される物体の位置情報を処理する情報処理装置であって、前記撮像部により前記移動体の周囲が撮像された画像に基づいて、前記移動体の位置情報を取得する移動体位置取得部と、前記撮像部により前記保持部が撮像された画像に基づいて、前記移動体による前記物体の保持又は非保持の何れか一方の状態を取得する保持情報取得部と、前記移動体位置取得部が取得した前記移動体の位置情報と、前記保持情報取得部が取得した状態とに基づいて、前記物体の位置情報を取得する物体位置取得部と、を備え、前記保持情報取得部は、前記物体の保持時および前記物体の保持前後における前記保持部に対する前記物体の距離を算出して、前記移動体による2つ目以降の前記物体の保持又は非保持の何れか一方の状態を確定する、ことを特徴とする。
【発明の効果】
【0007】
本発明によれば、複数の物体を同時に移動体で搬送する場合に、複数の物体の搬送状態(保持/非保持)を認識することができる、という効果を奏する。
【図面の簡単な説明】
【0008】
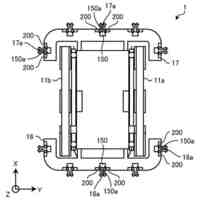
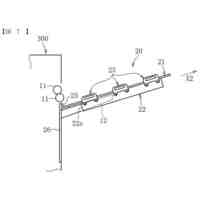
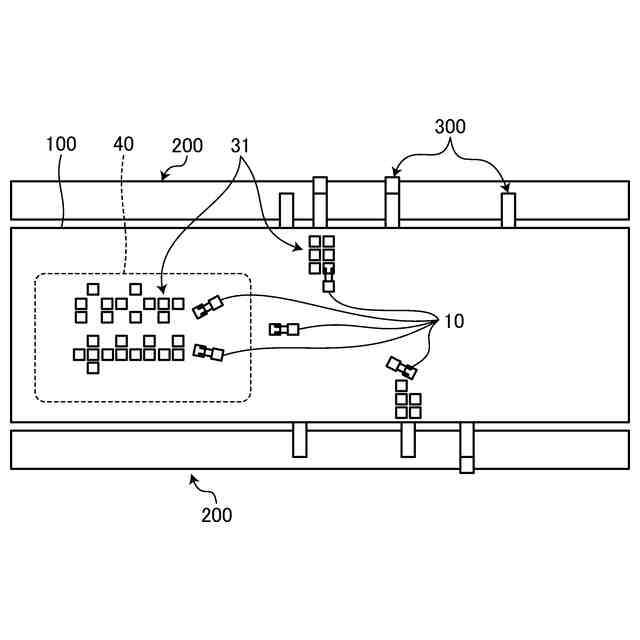
図1は、倉庫内における物体の位置情報の一例を説明する図である。
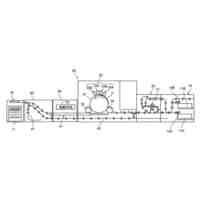
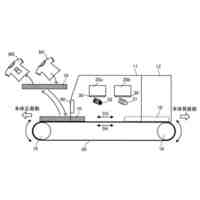
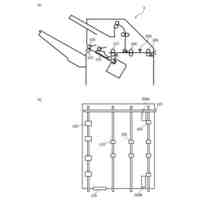
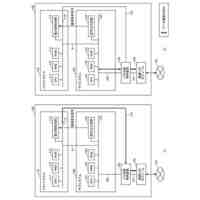
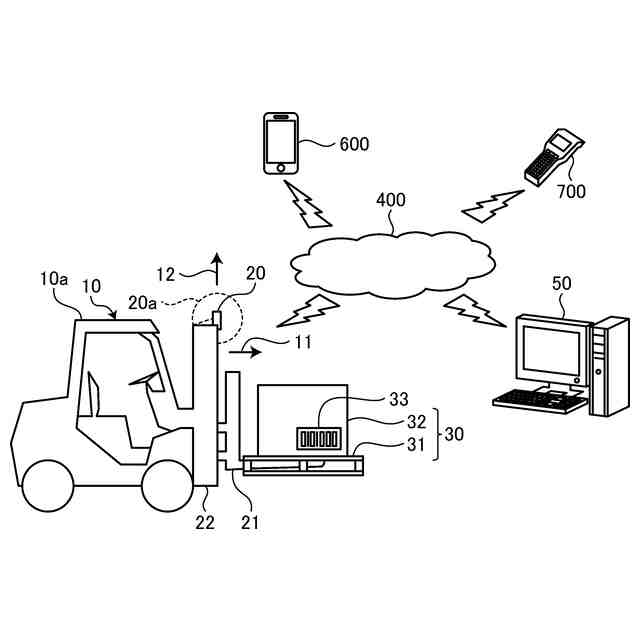
図2は、実施形態に係る情報処理システムの全体構成の一例を示す図である。
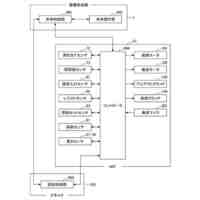
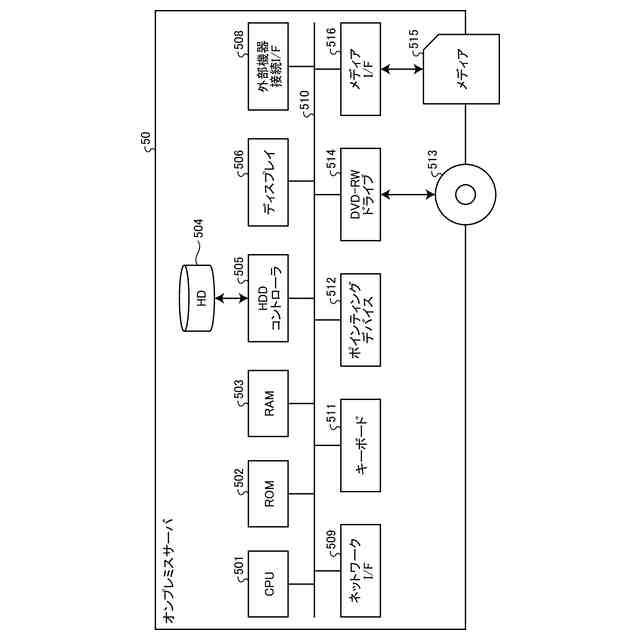
図3は、オンプレミスサーバのハードウェア構成の一例を示すブロック図である。
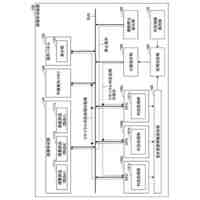
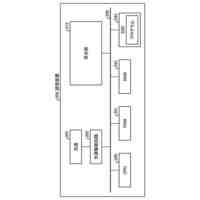
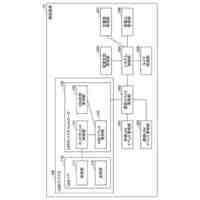
図4は、情報処理システムの機能構成の一例を示すブロック図である。
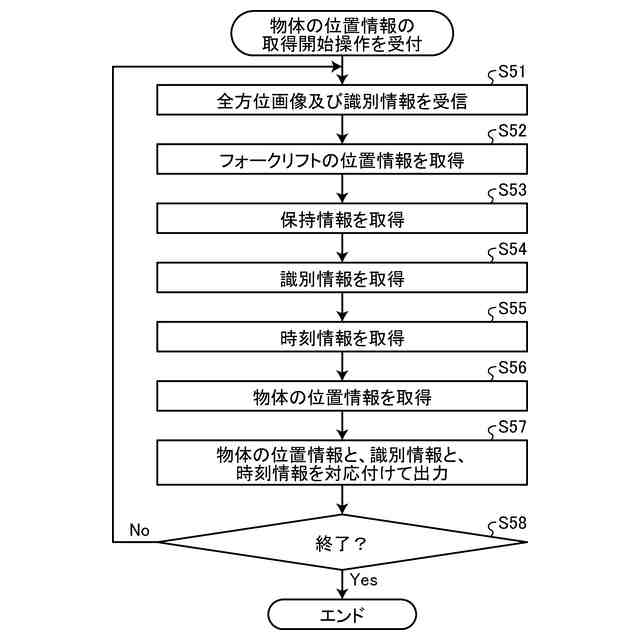
図5は、オンプレミスサーバによる処理の一例を示すフローチャートである。
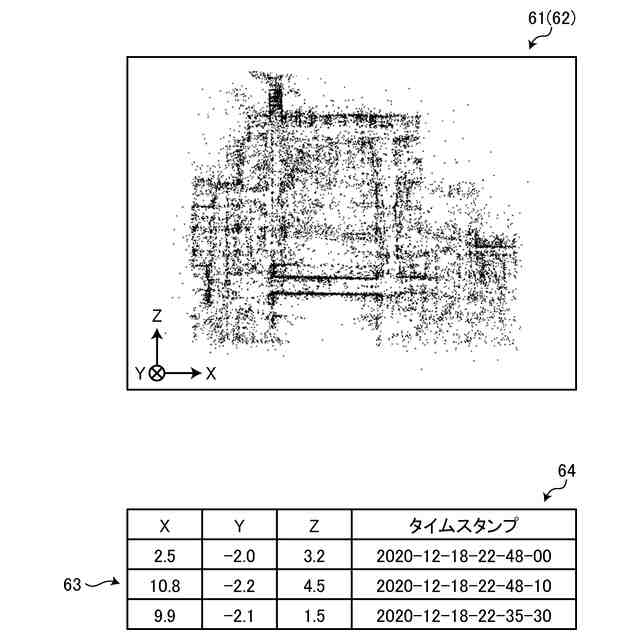
図6は、物体位置情報の取得結果の第1例を示す図である。
図7は、物体位置情報の取得結果の第2例を示す図である。
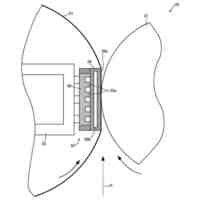
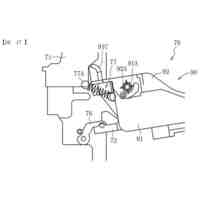
図8は、保持情報取得部における物体の検知例について説明する図である。
図9-1は、保持情報取得部が2枚目のパレットの保持状態を確定するまでの操作手順について説明する図である。
図9-2は、保持情報取得部が2枚目のパレットの保持状態を確定するまでの操作手順について説明する図である。
図9-3は、保持情報取得部が2枚目のパレットの保持状態を確定するまでの操作手順について説明する図である。
図9-4は、保持情報取得部が2枚目のパレットの保持状態を確定するまでの操作手順について説明する図である。
図10-1は、保持情報取得部が1枚目のパレットのみの保持状態を確定するまでの操作手順について説明する図である。
図10-2は、保持情報取得部が1枚目のパレットのみの保持状態を確定するまでの操作手順について説明する図である。
図10-3は、保持情報取得部が1枚目のパレットのみの保持状態を確定するまでの操作手順について説明する図である。
図10-4は、保持情報取得部が1枚目のパレットのみの保持状態を確定するまでの操作手順について説明する図である。
図11-1は、保持情報取得部が2枚目のパレットの非保持状態を確定するまでの操作手順について説明する図である。
図11-2は、保持情報取得部が2枚目のパレットの非保持状態を確定するまでの操作手順について説明する図である。
図11-3は、保持情報取得部が2枚目のパレットの非保持状態を確定するまでの操作手順について説明する図である。
図12-1は、保持情報取得部がパレットの段積み個数を確定するまでの操作手順について説明する図である。
図12-2は、保持情報取得部がパレットの段積み個数を確定するまでの操作手順について説明する図である。
【発明を実施するための形態】
【0009】
以下に添付図面を参照して、情報処理装置、情報処理システムおよび情報処理方法の実施の形態を詳細に説明する。各図面において、同一の構成部分には同一符号を付し、重複した説明を省略する場合がある。
【0010】
実施形態に係る情報処理装置は、移動体により移動される物体の位置情報を処理するものである。例えば、移動体はフォークリフトであり、物体はパレットを含む。実施形態に係る情報処理装置は、フォークリフトにより移動されるパレット等の物体の位置情報を処理して、物体の移動を認識し、また追跡する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社リコー
移動体
1か月前
株式会社リコー
画像形成装置
10日前
株式会社リコー
画像形成装置
18日前
株式会社リコー
画像形成装置
13日前
株式会社リコー
画像形成装置
10日前
株式会社リコー
画像形成装置
4日前
株式会社リコー
画像形成システム
1か月前
株式会社リコー
機器及び異常判定方法
18日前
株式会社リコー
画像形成装置、及び、機器
3日前
株式会社リコー
画像形成装置及びシステム
16日前
株式会社リコー
延長トレイ及び画像形成装置
13日前
株式会社リコー
定着装置、及び画像形成装置
18日前
株式会社リコー
光走査装置及び画像形成装置
2日前
株式会社リコー
印刷装置および印刷システム
1か月前
株式会社リコー
画像読取装置及び画像読取方法
12日前
株式会社リコー
液体吐出装置及び液体吐出方法
1か月前
株式会社リコー
シート供給装置、画像形成装置
2日前
株式会社リコー
表示装置、切替方法、プログラム
23日前
株式会社リコー
樹脂粒子、及び樹脂粒子の製造方法
10日前
株式会社リコー
媒体処理装置及び画像形成システム
13日前
株式会社リコー
加熱搬送装置、及び、画像形成装置
3日前
株式会社リコー
媒体処理装置及び画像形成システム
1か月前
株式会社リコー
加熱装置、定着装置、画像形成装置
5日前
株式会社リコー
読取装置、読取方法およびプログラム
13日前
株式会社リコー
シート給送装置及び画像形成システム
19日前
株式会社リコー
シート給紙装置、および画像形成装置
1か月前
株式会社リコー
加熱装置、定着装置及び画像形成装置
17日前
株式会社リコー
通信端末、通信方法、及びプログラム
16日前
株式会社リコー
通信装置、通信方法、及びプログラム
16日前
株式会社リコー
樹脂粒子、トナー、及び、画像形成装置
2日前
株式会社リコー
光源装置、画像投影装置および調整方法
23日前
株式会社リコー
通信装置、状態制御方法、及びプログラム
19日前
株式会社リコー
ノード、データ共有方法、及びプログラム
1か月前
株式会社リコー
画像形成装置、及び、プロセスカートリッジ
23日前
株式会社リコー
画像形成装置、情報処理方法及びプログラム
16日前
株式会社リコー
画像形成装置、画像処理方法およびプログラム
11日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ