TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025153189
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055526
出願日
2024-03-29
発明の名称
施工システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/20 20060101AFI20251002BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械を実際に動かすための目標情報を、外部装置が把握した状態で、コントローラが作業機械を動かすことができる。
【解決手段】施工システム1は、作業を行う作業機械10と、作業機械10を動作させる指令を出力するコントローラ50と、作業の目標に関する目標情報をコントローラ50へ出力する外部装置70と、を有している。コントローラ50は、目標情報の修正が必要であるか否かを判定し、目標情報の修正が必要である場合に、修正に関する修正情報を外部装置70へ出力する。外部装置70は、修正情報に基づく最終目標情報を、コントローラ50へ出力する。
【選択図】図2
特許請求の範囲
【請求項1】
作業を行う作業機械と、前記作業機械を動作させる指令を出力するコントローラと、前記作業の目標に関する目標情報を前記コントローラへ出力する外部装置と、を有した施工システムであって、
前記コントローラは、
前記目標情報の修正が必要であるか否かを判定し、
前記目標情報の修正が必要である場合に、修正に関する修正情報を前記外部装置へ出力し、
前記外部装置は、
前記修正情報に基づく最終目標情報を、前記コントローラへ出力する、
施工システム。
続きを表示(約 870 文字)
【請求項2】
請求項1に記載の施工システムであって、
前記コントローラは、
前記修正情報として、前記目標情報をどのように修正すべきかを示す修正目標情報を前記外部装置へ出力し、
前記外部装置は、
前記修正目標情報を許可するか否かを判定し、
前記最終目標情報として、前記判定の結果に基づく情報を前記コントローラへ出力する、
施工システム。
【請求項3】
請求項2に記載の施工システムであって、
前記外部装置は、
前記作業機械の周囲の状況に基づいて、前記修正目標情報を許可するか否かを判定する、
施工システム。
【請求項4】
請求項1に記載の施工システムであって、
前記作業機械は、機械本体と、前記機械本体に取り付けられるアタッチメントと、を有し、
前記コントローラは、前記アタッチメントが前記作業の対象となる目標点に届かない場合、前記機械本体の位置を移動することを示す情報を、前記修正情報として前記外部装置へ出力する、
施工システム。
【請求項5】
請求項1に記載の施工システムであって、
前記コントローラは、
前記修正情報として、前記目標情報を修正すべき要因を示す修正要因情報を前記外部装置へ出力し、
前記外部装置は、
前記最終目標情報として、前記修正要因情報に基づいて修正した前記目標情報を前記コントローラへ出力する、
施工システム。
【請求項6】
請求項1~5の何れか1項に記載の施工システムであって、
前記外部装置は、次回以降に前記コントローラへ出力する前記目標情報を前記修正情報に基づいて修正する、
施工システム。
【請求項7】
請求項1~5の何れか1項に記載の施工システムであって、
前記外部装置は、前記目標情報、および、前記最終目標情報を表示する、
施工システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械と作業機械に対して指示を行う外部装置とを有した施工システムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
例えば、特許文献1には、自動運転される作業機械が有するアタッチメントについて、その作業の目標となる軌跡を、作業者が作業現場に即したものに変更できる目標軌跡変更システムが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-34650号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、作業機械を実際に動かすための目標情報を、外部装置が把握していない状態で、コントローラが勝手に作業機械を動かしてしまうといった問題があった。
【0005】
そこで、本発明は、作業機械を実際に動かすための目標情報を、外部装置が把握した状態で、コントローラが作業機械を動かすことができる、施工システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
施工システムは、作業を行う作業機械と、コントローラと、外部装置と、を有する。前記コントローラは、前記作業機械を動作させる指令を出力する。前記外部装置は、前記作業の目標となる目標情報を前記コントローラへ出力する。前記コントローラは、前記目標情報の修正が必要であるか否かを判定する。前記コントローラは、前記目標情報の修正が必要である場合に、修正に関する修正情報を前記外部装置へ出力する。前記外部装置は、前記修正情報に基づく最終目標情報を、前記コントローラへ出力する。
【発明の効果】
【0007】
上記の施工システムにより、作業機械を実際に動かすための目標情報を、外部装置が把握した状態で、コントローラが作業機械を動かすことができる。
【図面の簡単な説明】
【0008】
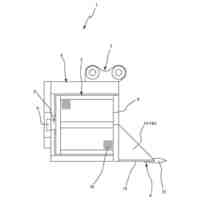
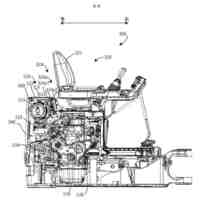
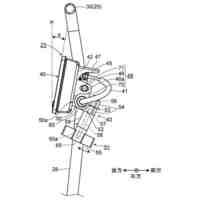
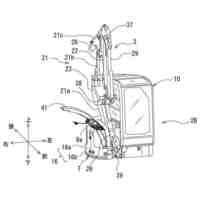
施工システム1の作業機械10などを横から見た図である。
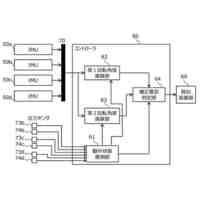
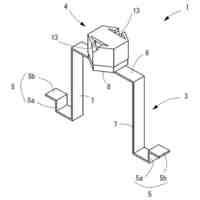
図1に示す施工システム1のブロック図である。
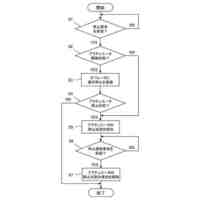
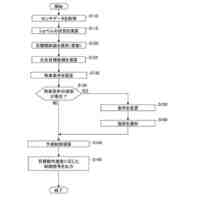
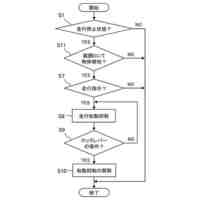
図2に示すコントローラ50などの処理のフローチャートである。
【発明を実施するための形態】
【0009】
図面を参照して、施工システム1について説明する。
【0010】
施工システム1は、作業機械10(図1参照)の目標動作が修正された場合に、修正後の目標動作を外部装置70(図2参照)が把握した状態で、目標動作に従って作業機械10を動かすシステムである。図2に示すように、施工システム1は、作業機械10と、検出部31(図2参照)と、入力部35と、コントローラ50(コンピュータ)と、出力部60と、外部装置70と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
バケット
7日前
個人
建物の不同沈下の修正方法
14日前
株式会社富田製作所
継手部構造
7日前
千代田工営株式会社
回転貫入杭
21日前
株式会社大林組
操縦装置
10日前
株式会社熊谷組
山留壁用親杭
27日前
株式会社熊谷組
地盤改良方法
1か月前
日立建機株式会社
作業機械
28日前
日立建機株式会社
作業機械
27日前
日立建機株式会社
建設機械
28日前
日立建機株式会社
建設機械
28日前
ヤンマーホールディングス株式会社
作業機械
20日前
日立建機株式会社
作業車両
23日前
ヤンマーホールディングス株式会社
作業機械
20日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
作業機械
27日前
日本車輌製造株式会社
建設機械
23日前
日立建機株式会社
建設機械
今日
日立建機株式会社
作業機械
27日前
FKS株式会社
擁壁及び擁壁の築造方法
9日前
ライト工業株式会社
鉄筋保持用治具
28日前
カナデビア株式会社
サクション基礎
28日前
株式会社次世代一次産業実践所
登山道の施工装置
15日前
株式会社三誠
建物の免震構造
14日前
鹿島建設株式会社
接続方法および接続構造
23日前
株式会社竹内製作所
作業用車両
27日前
株式会社竹内製作所
作業用車両
27日前
株式会社竹内製作所
作業用車両
27日前
株式会社竹内製作所
作業用車両
27日前
JFEスチール株式会社
鋼管矢板の継手構造
28日前
株式会社日立建機ティエラ
建設機械
29日前
山形新興株式会社
建築物の基礎及び基礎成形型
22日前
清水建設株式会社
遮水層の構築方法
27日前
浙江工業大学
多機能土柱モデル装置及び使用方法
1か月前
日本車輌製造株式会社
杭打機の制御システム
13日前
ヤンマーホールディングス株式会社
作業機械
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ