TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152931
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055119
出願日
2024-03-28
発明の名称
ロボットおよびロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】第2アームの変形を抑制することのできるロボットおよびロボットシステムを提供する。
【解決手段】ロボットは、基台と、基台に対して第1回動軸まわりに回動する第1アームと、第1アームに対して第2回動軸まわりに回動する第2アームと、第2アームの外側に露出しているコネクターと、を有する。また、第2アームは、アームベースと、アームベースに固定され、コネクターが配置されているフレームと、アームベースに固定され、フレームを支持している第1支持部材および第2支持部材と、を有する。また、フレームは、第2アームの延在方向に沿って延在し、第2アームの基端側に位置する基端部においてアームベースに固定され、先端部がアームベースと離間する自由端となっている片持ち梁状であり、コネクターよりも第2アームの先端側の部分において第1支持部材および第2支持部材に支持されている。
【選択図】図8
特許請求の範囲
【請求項1】
基台と、
前記基台に連結され、前記基台に対して第1回動軸まわりに回動する第1アームと、
基端部において前記第1アームに連結され、前記第1アームに対して前記第1回動軸と平行な第2回動軸まわりに回動する第2アームと、
前記第2アームの先端部に位置し、前記第1回動軸と平行な第3回動軸まわりに回動し、かつ、前記第3回動軸に沿って直動するシャフトと、
前記第2アームに配置され、前記第2アームの外側に露出しているコネクターと、を有し、
前記第2アームは、前記第1アームに連結されているアームベースと、前記アームベースに固定され、前記コネクターが配置されているフレームと、前記アームベースに固定され、前記フレームを支持している第1支持部材および第2支持部材と、を有し、
前記フレームは、前記第2回動軸に沿う方向からの平面視で、前記第2アームの延在方向に沿って延在し、前記第2アームの基端側に位置する基端部において前記アームベースに固定され、先端部が前記アームベースと離間する自由端となっている片持ち梁状であり、前記コネクターよりも前記第2アームの先端側の部分において前記第1支持部材および前記第2支持部材に支持されていることを特徴とするロボット。
続きを表示(約 2,000 文字)
【請求項2】
前記フレームは、前記コネクターが配置されているコネクター保持部を有し、
前記第1支持部材および前記第2支持部材は、前記コネクター保持部を支持している請求項1に記載のロボット。
【請求項3】
前記第2回動軸に沿う方向からの平面視で、
前記第2回動軸と前記第3回動軸とを通る線分を仮想中心軸としたとき、
前記コネクター保持部の前記仮想中心軸に直交する方向の一方側の端部が前記第1支持部材に支持され、他方側の端部が前記第2支持部材に支持されている請求項2に記載のロボット。
【請求項4】
前記仮想中心軸に沿う方向からの平面視で、前記第1支持部材および前記第2支持部材は、互いの離間距離が鉛直方向の下側に向けて大きくなるように、鉛直方向に対して傾斜している請求項3に記載のロボット。
【請求項5】
前記第1支持部材および前記第2支持部材は、それぞれ、前記コネクター保持部を鉛直方向の下側から支えるように支持している請求項2に記載のロボット。
【請求項6】
前記第1支持部材と前記アームベースとの位置決めを行う第1位置決め部と、
前記第2支持部材と前記アームベースとの位置決めを行う第2位置決め部と、を有する請求項1に記載のロボット。
【請求項7】
前記第1位置決め部は、前記アームベースおよび前記第1支持部材の一方に形成されている第1突起と、他方に形成され、前記第1突起と係合する第1孔と、を有し、
前記第2位置決め部は、前記アームベースおよび前記第2支持部材の一方に形成されている第2突起と、他方に形成され、前記第2突起と係合する第2孔と、を有する請求項6に記載のロボット。
【請求項8】
前記フレームは、前記アームベースに固定されている固定部を有し、
前記固定部は、鉛直方向に対して傾斜している請求項1に記載のロボット。
【請求項9】
前記第2回動軸に沿う方向からの平面視で、前記第2回動軸と前記第3回動軸とを通る線分を仮想中心軸としたとき、前記仮想中心軸の一方側に前記第1支持部材が位置し、他方側に前記第2支持部材が位置し、さらに、前記第1支持部材および前記第2支持部材は、互いの離間距離が鉛直方向の下側に向けて大きくなるように、鉛直方向に対して傾斜しており、
前記フレームは、板金を折り曲げて形成されており、前記アームベースに固定されている板状の固定部と、前記コネクターが配置されている板状のコネクター保持部と、を有し、
前記固定部は、先端側が鉛直方向に対して前記第2アームの先端側に傾斜して配置され、
前記第1支持部材および前記第2支持部材は、それぞれ、前記コネクター保持部を鉛直方向の下側から支えるように支持し、
前記アームベースおよび前記第1支持部材の一方に形成されている第1突起と、他方に形成され、前記第1突起と係合する第1孔と、を有し、前記第1支持部材と前記アームベースとの位置決めを行う第1位置決め部と、
前記アームベースおよび前記第2支持部材の一方に形成されている第2突起と、他方に形成され、前記第2突起と係合する第2孔と、を有し、前記第2支持部材と前記アームベースとの位置決めを行う第2位置決め部と、を有する請求項1に記載のロボット。
【請求項10】
ロボットと、
前記ロボットの駆動を制御する制御装置と、を有し、
前記ロボットは、基台と、
前記基台に連結され、前記基台に対して第1回動軸まわりに回動する第1アームと、
基端部において前記第1アームに連結され、前記第1アームに対して前記第1回動軸と平行な第2回動軸まわりに回動する第2アームと、
前記第2アームの先端部に位置し、前記第1回動軸と平行な第3回動軸まわりに回動し、かつ、前記第3回動軸に沿って直動するシャフトと、
前記第2アームに配置され、前記第2アームの外側に露出しているコネクターと、を有し、
前記第2アームは、前記第1アームに連結されているアームベースと、前記アームベースに固定され、前記コネクターが配置されているフレームと、前記アームベースに固定され、前記フレームを支持している第1支持部材および第2支持部材と、を有し、
前記フレームは、前記第2回動軸に沿う方向からの平面視で、前記第2アームの延在方向に沿って延在し、前記第2アームの基端側に位置する基端部において前記アームベースに固定され、先端部が前記アームベースと離間する自由端となっている片持ち梁状であり、前記コネクターよりも前記第2アームの先端側の部分において前記第1支持部材および前記第2支持部材に支持されていることを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットおよびロボットシステムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
特許文献1に記載されたスカラロボット(水平多関節ロボット)は、基台と、基台に対して鉛直方向に沿う第1回動軸まわりに回動可能に連結された第1アームと、第1アームに対して鉛直方向に沿う第2回動軸まわりに回動可能に連結された第2アームと、を有する。また、第2アームは、第1アームに回動可能に連結されたアームベース(アーム基台)と、アームベースに固定され、送電部および加減圧チューブを保持するフレーム(接続板)と、アームベースを覆うカバー(カバー部)と、を備える。
【先行技術文献】
【特許文献】
【0003】
特開2013-006239号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では記載されていないが、スカラロボットでは、ユーザーが接続して使用するための各種コネクターをフレームに配置することがある。しかしながら、特許文献1の構成では、フレームが片持ち梁のように基端部においてアームベースに固定され、先端部が自由端となっている。そのため、ユーザーがフレームに配置されたコネクターへの接続を行う際に生じる応力によってフレームが撓み、塑性変形するおそれがある。
【課題を解決するための手段】
【0005】
本発明のロボットは、基台と、
前記基台に連結され、前記基台に対して第1回動軸まわりに回動する第1アームと、
基端部において前記第1アームに連結され、前記第1アームに対して前記第1回動軸と平行な第2回動軸まわりに回動する第2アームと、
前記第2アームの先端部に位置し、前記第1回動軸と平行な第3回動軸まわりに回動し、かつ、前記第3回動軸に沿って直動するシャフトと、
前記第2アームに配置され、前記第2アームの外側に露出しているコネクターと、を有し、
前記第2アームは、前記第1アームに連結されているアームベースと、前記アームベースに固定され、前記コネクターが配置されているフレームと、前記アームベースに固定され、前記フレームを支持している第1支持部材および第2支持部材と、を有し、
前記フレームは、前記第2回動軸に沿う方向からの平面視で、前記第2アームの延在方向に沿って延在し、前記第2アームの基端側に位置する基端部において前記アームベースに固定され、先端部が前記アームベースと離間する自由端となっている片持ち梁状であり、前記コネクターよりも前記第2アームの先端側の部分において前記第1支持部材および前記第2支持部材に支持されている。
【0006】
本発明のロボットシステムは、ロボットと、
前記ロボットの駆動を制御する制御装置と、を有し、
前記ロボットは、基台と、
前記基台に連結され、前記基台に対して第1回動軸まわりに回動する第1アームと、
基端部において前記第1アームに連結され、前記第1アームに対して前記第1回動軸と平行な第2回動軸まわりに回動する第2アームと、
前記第2アームの先端部に位置し、前記第1回動軸と平行な第3回動軸まわりに回動し、かつ、前記第3回動軸に沿って直動するシャフトと、
前記第2アームに配置され、前記第2アームの外側に露出しているコネクターと、を有し、
前記第2アームは、前記第1アームに連結されているアームベースと、前記アームベースに固定され、前記コネクターが配置されているフレームと、前記アームベースに固定され、前記フレームを支持している第1支持部材および第2支持部材と、を有し、
前記フレームは、前記第2回動軸に沿う方向からの平面視で、前記第2アームの延在方向に沿って延在し、前記第2アームの基端側に位置する基端部において前記アームベースに固定され、先端部が前記アームベースと離間する自由端となっている片持ち梁状であり、前記コネクターよりも前記第2アームの先端側の部分において前記第1支持部材および前記第2支持部材に支持されている。
【図面の簡単な説明】
【0007】
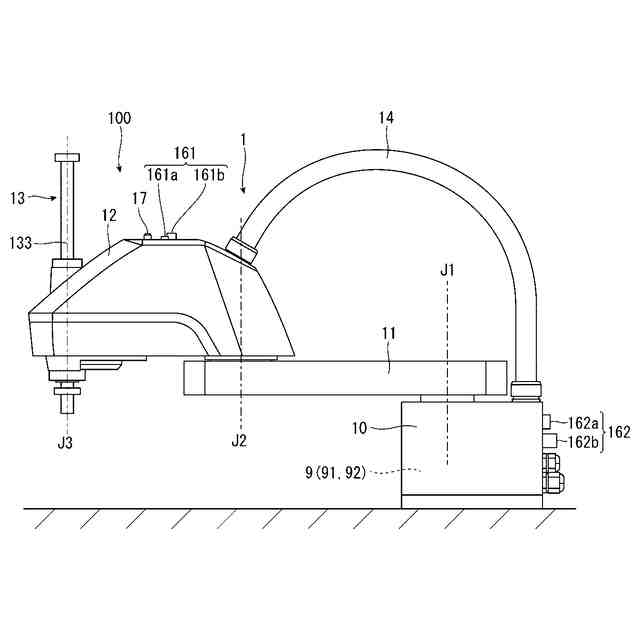
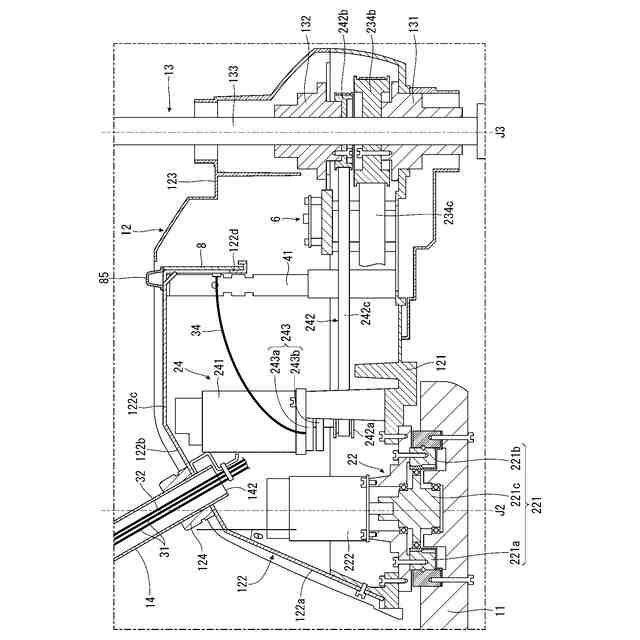
第1実施形態に係るロボットを示す側面図である。
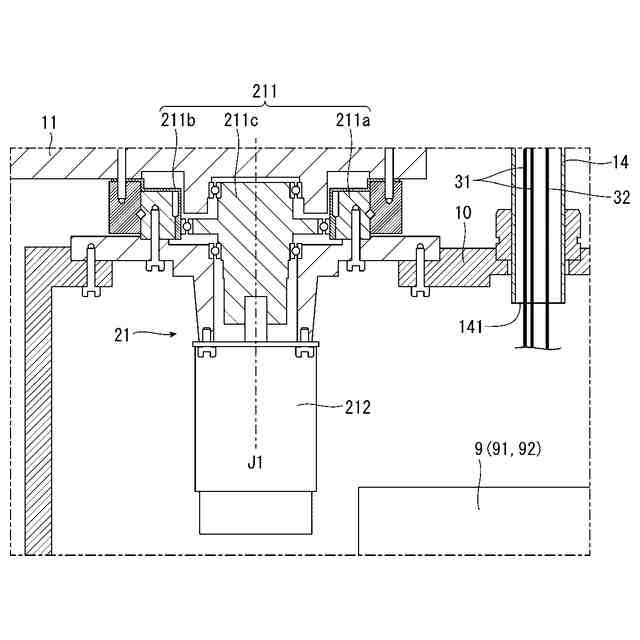
基台と第1アームとの連結部分を示す断面図である。
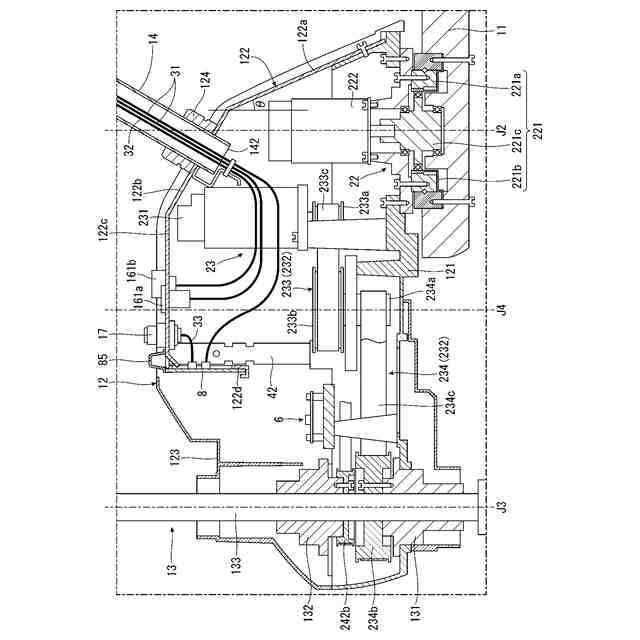
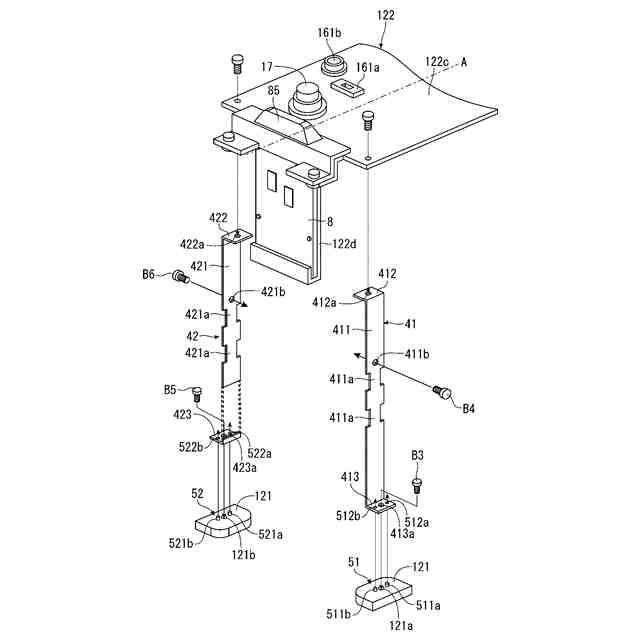
第2アームを横方向一方側から見た断面図である。
第2アームを横方向他方側から見た断面図である。
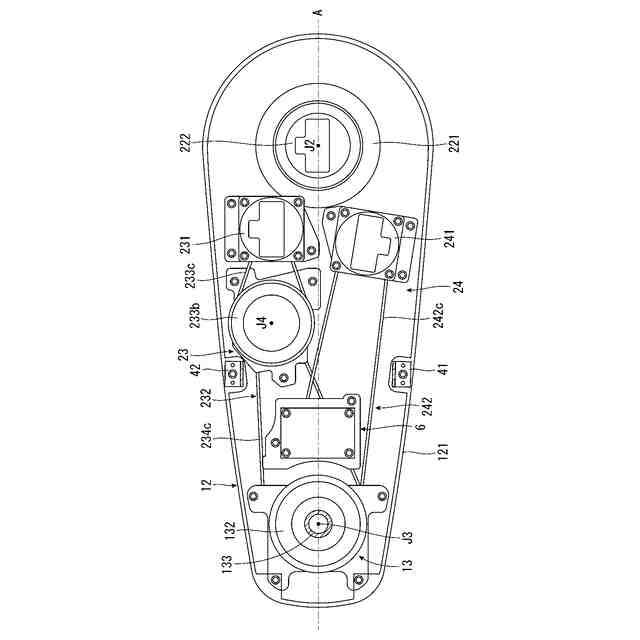
第2アームの内部を示す上面図である。
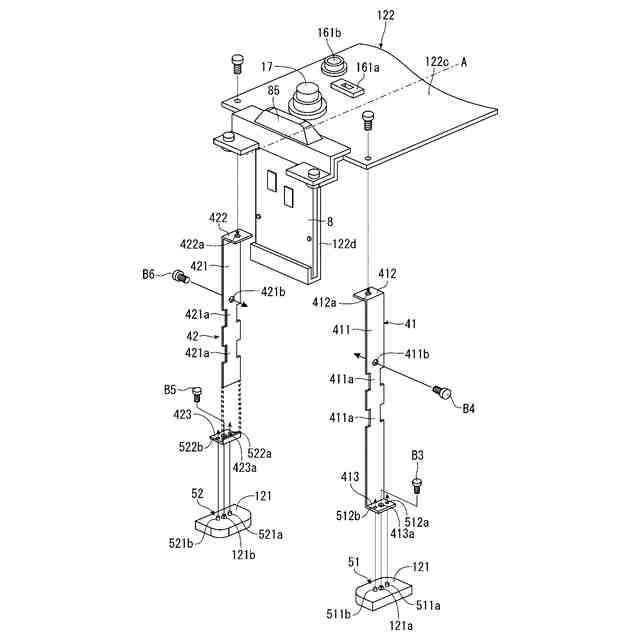
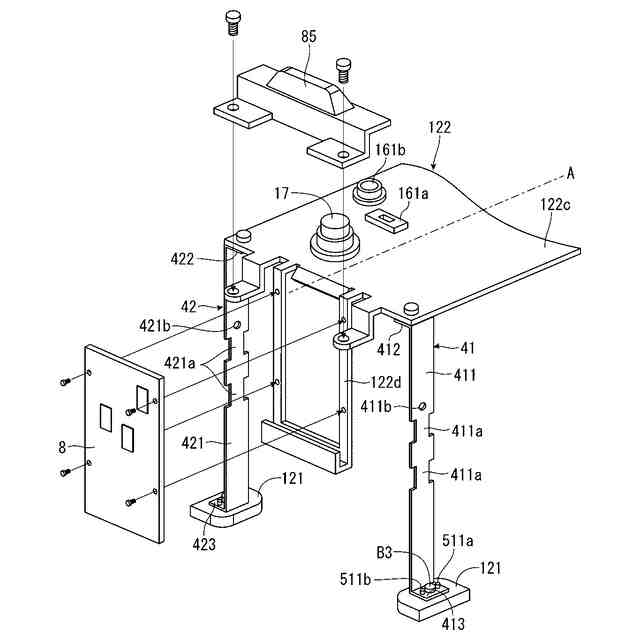
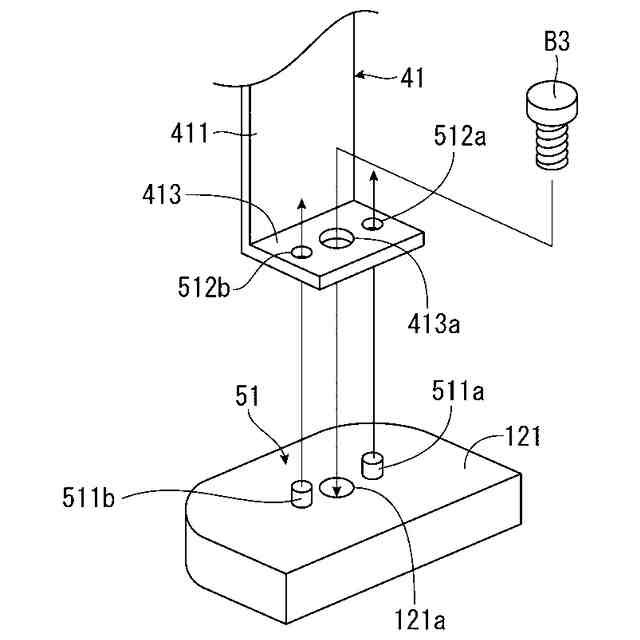
フレームの先端部を拡大して示す斜視図である。
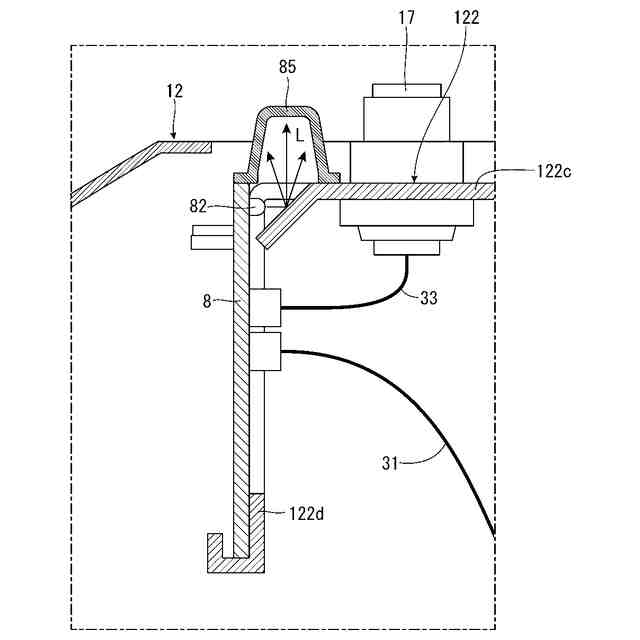
フレームの先端部を拡大して示す断面図である。
第1支持部材および第2支持部材を拡大して示す斜視図である。
第1位置決め部を拡大して示す斜視図である。
第2位置決め部を拡大して示す斜視図である。
第2実施形態に係るロボットが有する第1支持部材および第2支持部材を示す断面図である。
第3実施形態に係るロボットが有する第1支持部材および第2支持部材を拡大して示す斜視図である。
第2アームの内部を示す上面図である。
【発明を実施するための形態】
【0008】
以下、本発明のロボットおよびロボットシステムを添付図面に示す実施形態に基づいて詳細に説明する。
【0009】
<第1実施形態>
図1は、第1実施形態に係るロボットを示す側面図である。図2は、基台と第1アームとの連結部分を示す断面図である。図3は、第2アームを横方向一方側から見た断面図である。図4は、第2アームを横方向他方側から見た断面図である。図5は、第2アームの内部を示す上面図である。図6は、フレームの先端部を拡大して示す斜視図である。図7は、フレームの先端部を拡大して示す断面図である。図8は、第1支持部材および第2支持部材を拡大して示す斜視図である。図9は、第1位置決め部を拡大して示す斜視図である。図10は、第2位置決め部を拡大して示す斜視図である。
【0010】
なお、図1中の上下方向は、鉛直方向と一致している。そのため、以下では、図1中の上側を「上」、下側を「下」とも言う。また、本明細書において「鉛直」とは、鉛直と一致している場合のみならず、本発明の効果を発揮し得る限りの範囲において鉛直に対して傾斜している場合、例えば、鉛直に対して±5°以内で傾斜している場合も含む意味である。同様に、本明細書において「平行」とは、2つの対象が平行と一致している場合のみならず、本発明の効果を発揮し得る限りの範囲において平行から傾斜している場合、例えば、平行に対して±5°以内で傾斜している場合も含む意味である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
川崎重工業株式会社
ロボット
10日前
株式会社三協システム
製函機
1か月前
株式会社不二越
ロボット
9日前
株式会社三協システム
移載装置
1か月前
CKD株式会社
把持装置
1か月前
株式会社竹中工務店
補助セット
9日前
川崎重工業株式会社
ハンド
1日前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
ロボットシステム
1か月前
SMC株式会社
着脱装置
1か月前
株式会社ミクロブ
把持装置
1か月前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
トヨタ自動車株式会社
カプラ接続治具
1か月前
工機ホールディングス株式会社
作業機
1日前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
移動ロボットシステム
12日前
トヨタ自動車株式会社
ロボット
4日前
株式会社不二越
エッジ仕上げ装置
22日前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
1日前
株式会社不二越
ロボットシステム
1か月前
本田技研工業株式会社
装置
15日前
トヨタ自動車株式会社
歩行ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
4日前
積水ハウス株式会社
フィルム除去具
2か月前
株式会社不二越
垂直多関節ロボット
23日前
ダイハツ工業株式会社
移載治具
1か月前
シンフォニアテクノロジー株式会社
搬送装置
12日前
ライオン株式会社
移載システム
24日前
工機ホールディングス株式会社
作業機
1日前
アネックスツール株式会社
ドライバービット
8日前
大和ハウス工業株式会社
ねじ回転工具
1か月前
株式会社不二越
協働ロボットシステム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































