TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150932
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024052097
出願日
2024-03-27
発明の名称
動作検知装置および方法
出願人
株式会社アイシン
代理人
弁理士法人アイテック国際特許事務所
主分類
G01S
13/52 20060101AFI20251002BHJP(測定;試験)
要約
【課題】少なくとも1回の静止動作を含む動作体の動作を精度よく検知可能にする。
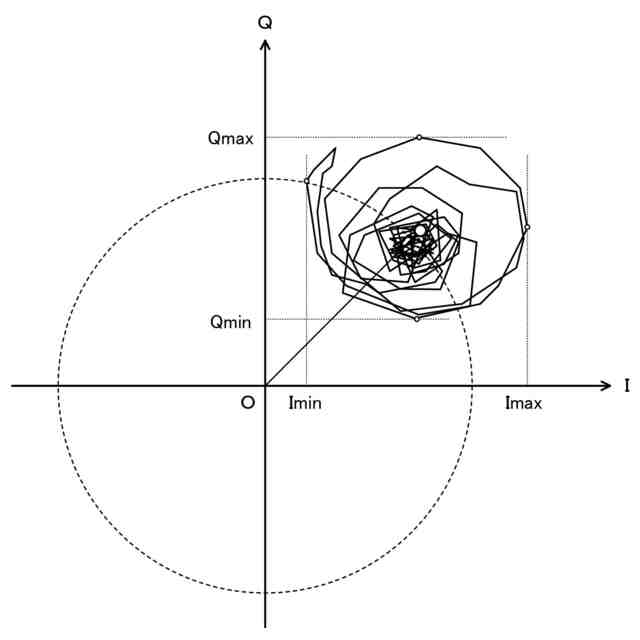
【解決手段】本開示の動作検知装置は、少なくとも1回の静止動作を含む動作体の動作を検知するものであり、動作体に当たって反射した反射電波から直交復調により同相成分および直交位相成分を抽出すると共に、抽出した同相成分および直交位相成分に基づくリサージュ波形を取得するリサージュ波形取得部と、リサージュ波形を形成する複数の点のIQ直交座標系における座標に基づいて、リサージュ波形の中心とIQ直交座標系の原点とのI軸方向における第1推定距離と、リサージュ波形の中心とIQ直交座標系の原点とのQ軸方向における第2推定距離とを取得すると共に、取得した第1および第2推定距離に基づいてリサージュ波形のオフセットを補正するオフセット補正部とを含む。
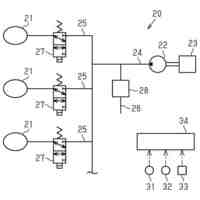
【選択図】図2
特許請求の範囲
【請求項1】
少なくとも1回の静止動作を含む動作体の動作を検知する動作検知装置であって、
前記動作体に向けて所定周波数帯の電波を送信する電波送信部と、
前記動作体で反射した反射電波を受信する電波受信部と、
前記反射電波から直交復調により同相成分および直交位相成分を抽出すると共に、抽出した前記同相成分および前記直交位相成分に基づくリサージュ波形を取得するリサージュ波形取得部と、
前記リサージュ波形を形成する複数の点のIQ直交座標系における座標に基づいて、前記リサージュ波形の中心と前記IQ直交座標系の原点とのI軸方向における第1推定距離と、前記リサージュ波形の前記中心と前記IQ直交座標系の前記原点とのQ軸方向における第2推定距離とを取得すると共に、取得した前記第1および第2推定距離に基づいて前記リサージュ波形のオフセットを補正するオフセット補正部と、
前記オフセット補正部により補正された前記リサージュ波形に基づいて前記動作を示す情報を取得する動作情報取得部と、
を備える動作検知装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の動作検知装置において、
前記オフセット補正部は、前記リサージュ波形を形成する前記複数の点の前記IQ直交座標系におけるI軸座標の平均値を前記第1推定距離として取得すると共に、前記リサージュ波形を形成する前記複数の点の前記IQ直交座標系におけるQ軸座標の平均値を前記第2推定距離として取得し、前記リサージュ波形を前記I軸方向に前記第1推定距離だけオフセットすると共に、前記Q軸方向に前記第2推定距離だけオフセットする動作検知装置。
【請求項3】
請求項1に記載の動作検知装置において、
前記オフセット補正部は、前記リサージュ波形の前記IQ直交座標系の前記I軸方向における最大値および最小値の平均値を前記第1推定距離として取得すると共に、前記リサージュ波形の前記IQ直交座標系の前記Q軸方向における最大値および最小値の平均値を前記第2推定距離として取得し、前記リサージュ波形を前記I軸方向に前記第1推定距離だけオフセットすると共に、前記Q軸方向に前記第2推定距離だけオフセットする動作検知装置。
【請求項4】
請求項1から3の何れか一項に記載の動作検知装置において、
前記所定周波数帯は、超広帯域無線通信規格の周波数帯である動作検知装置。
【請求項5】
請求項から3の何れか一項に記載の動作検知装置において、
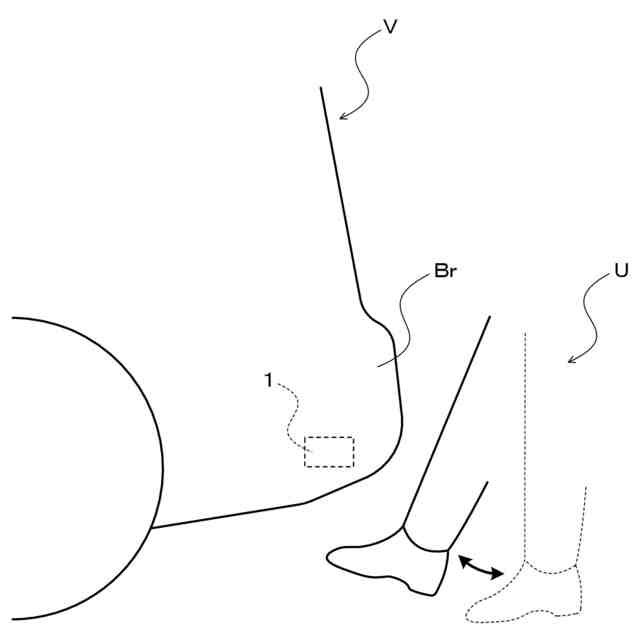
車両に搭載され、前記車両に対するユーザの接近を検知すると共に、前記ユーザが前記車両の所定箇所に足を接近させて一旦静止させた後に前記所定箇所から前記足を離間させるキック動作を検知する動作検知装置。
【請求項6】
少なくとも1回の静止動作を含む動作体の動作を取得する動作検知方法であって、
前記動作体に向けて所定周波数帯の電波を送信し、
前記動作体で反射した反射電波を受信し、
前記反射電波から直交復調により同相信号および直交位相信号を抽出すると共に、抽出した前記同相信号および前記直交位相信号に基づいてリサージュ波形を取得し、
前記リサージュ波形を形成する複数の点のIQ直交座標系における座標に基づいて、前記リサージュ波形の中心と前記IQ直交座標系の原点とのI軸方向における第1推定距離と、前記リサージュ波形の前記中心と前記IQ直交座標系の前記原点とのQ軸方向における第2推定距離とを取得し、
前記第1および第2推定距離に基づいて前記リサージュ波形のオフセットを補正し、
補正した前記リサージュ波形に基づいて前記動作を示す情報を取得する、
動作検知方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、動作体の動作を検知する動作検知装置および方法に関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
従来、ハードディスクドライブに含まれるスイングアームの位置の変化に応じてエンコーダから出力される2相の出力信号に基づいて当該スイングアームの位置を検出する位置検出装置が知られている(例えば、特許文献1参照)。この位置検出装置は、アナログデジタル変換手段と、補正手段と、デジタル演算手段とを含む。アナログデジタル変換手段は、エンコーダからの2相の出力信号をデジタル変換してデジタル信号を出力する。また、補正手段は、当該デジタル信号に基づいて生成されるリサージュ波形上の少なくとも3点を用いて当該リサージュ波形の中心位置を算出し、算出した中心位置とオフセットのない理想的なリサージュ波形の中心位置(原点位置)とに基づいてデジタル信号のオフセット(中心位置の原点位置からのズレ)を補正する。更に、デジタル演算手段は、補正手段により補正された信号を用いて被測定物であるスイングアームの位置を演算する。
【0003】
また、従来、車両に搭載されると共に当該車両の乗員、周辺の人、車、物の動き等を監視する物体変位量検知信号処理装置が知られている(例えば、特許文献2参照)。この物体変位量検知信号処理装置は、1つ以上のアンテナと、送受信回路と、変位量演算部とを含む。送受信回路は、検知対象となる物体に当該1つ以上のアンテナから送信波を送信し、当該物体で反射した反射波を当該アンテナから受信する。また、変位量演算部は、反射波を2つの信号に分配し、直交座標系に当該2つの信号をプロットすることによってリサージュ軌跡を作成する。更に、変位量演算部は、直交座標系の所定の象限にリサージュ軌跡を回転させて複数配置すると共に複数のリサージュ軌跡を時間軸上にプロットすることにより得られるパラメータに基づいて位相変化量を求め、当該位相変化量を変位量へと換算する。
【先行技術文献】
【特許文献】
【0004】
特開2009-162673号公報
特開2015-190952号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
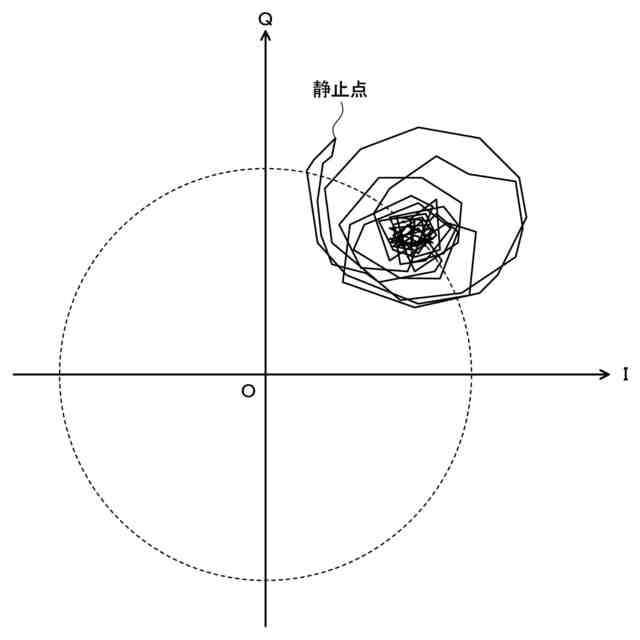
上記特許文献1に記載された位置検出装置は、エンコーダから出力される2相の出力信号に基づいてリサージュ波形を取得するものであることから、当該リサージュ波形は、乱れのない円に近いものになり、直交座標系の原点に対するリサージュ波形の中心のズレも比較的小さくなる。これに対して、人や車といった動作体からの反射波は、例えば手足やドアといった動作体の動いている部分(非静止部)からの反射波に、動作体の実質的に動いていない部分(静止部)で反射した成分やドップラー成分等が重畳したものとなる。このため、動作体からの反射波に基づいて得られるリサージュ波形は、複雑な波形となり、オフセットが大きくなって直交座標系の原点がリサージュ波形の範囲内に含まれなくなることが多い。従って、動作体の動作を検知する際に、特許文献1に記載された技術を用いても、リサージュ波形の中心を直交座標系の原点に近づける(オフセットする)ことは実質的に不可能であり、オフセットに起因して当該動作体の動作を精度よく検知することが困難になる。また、特許文献2に記載された物体変位量検知信号処理装置は、人や車といった動作体の動きを監視するものであるが、当該特許文献2には、複雑なリサージュ波形の中心を直交座標系の原点にオフセットする手法が開示も示唆もされていない。一方、動作体の動いていない部分からの反射波の影響を低減するためには、当該反射波にハイパスフィルタ処理を施すことも考えられる。しかしながら、動作体の動作に静止動作が含まれている場合には、ハイパスフィルタ処理が施された信号に基づくリサージュ波形に動作体の静止動作が含まれなくなってしまい、静止動作を含む動作体の動作を検知し得なくなってしまう。
【0006】
そこで、本開示は、少なくとも1回の静止動作を含む動作体の動作を精度よく検知可能にすることを主目的とする。
【課題を解決するための手段】
【0007】
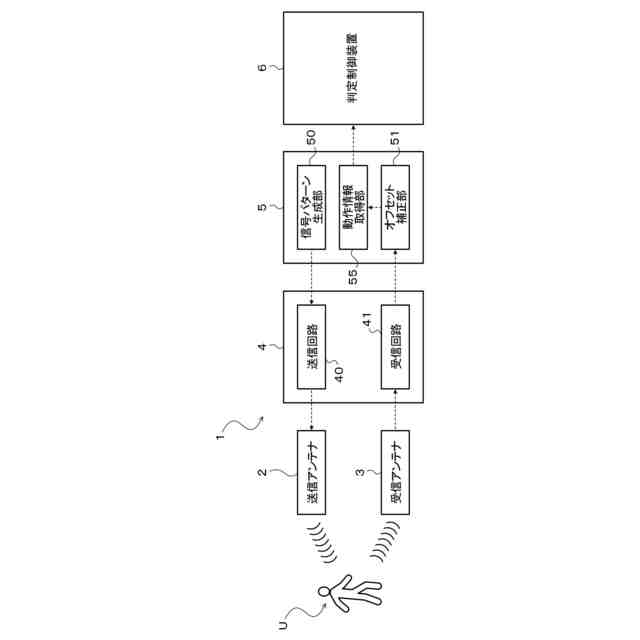
本開示の動作検知装置は、少なくとも1回の静止動作を含む動作体の動作を検知する動作検知装置であって、前記動作体に向けて所定周波数帯の電波を送信する電波送信部と、前記動作体で反射した反射電波を受信する電波受信部と、前記反射電波から直交復調により同相成分および直交位相成分を抽出すると共に、抽出した前記同相成分および前記直交位相成分に基づくリサージュ波形を取得するリサージュ波形取得部と、前記リサージュ波形を形成する複数の点のIQ直交座標系における座標に基づいて、前記リサージュ波形の中心と前記IQ直交座標系の原点とのI軸方向における第1推定距離と、前記リサージュ波形の前記中心と前記IQ直交座標系の前記原点とのQ軸方向における第2推定距離とを取得すると共に、取得した前記第1および第2推定距離に基づいて前記リサージュ波形のオフセットを補正するオフセット補正部と、前記オフセット補正部により補正された前記リサージュ波形に基づいて前記動作を示す情報を取得する動作情報取得部とを含むものである。
【0008】
本開示の動作検知装置は、少なくとも1回の静止動作を含む動作体の動作を検知するものであり、電波送信部と、電波受信部と、リサージュ波形取得部と、オフセット補正部と、動作情報取得部とを含む。電波送信部は、動作体に向けて所定周波数帯の電波を送信し、電波受信部は、動作体で反射した反射電波を受信する。リサージュ波形取得部は、反射電波から直交復調により同相成分および直交位相成分を抽出すると共に、抽出した同相成分および直交位相成分に基づくリサージュ波形を取得する。オフセット補正部は、リサージュ波形を形成する複数の点のIQ直交座標系における座標に基づいて、リサージュ波形の中心とIQ直交座標系の原点とのI軸方向における第1推定距離と、リサージュ波形の中心とIQ直交座標系の原点とのQ軸方向における第2推定距離とを取得すると共に、取得した第1および第2推定距離に基づいてリサージュ波形オフセットを補正する。動作情報取得部は、オフセット補正部によりオフセットが補正されたリサージュ波形に基づいて動作体の動作を示す情報を取得する。これにより、動作体の動いている部分(非静止部)からの反射波に、動作体の実質的に動いていない部分(静止部)で反射した成分等が重畳することに起因して、リサージュ波形が複雑な波形となり、かつIQ直交座標系の原点がリサージュ波形の範囲内に含まれなくなっていたとしても、動作体の動いている部分からの反射電波に基づくリサージュ波形の中心をIQ直交座標系の原点付近に近づけることができる。この結果、第1および第2推定距離に基づいてオフセットされたリサージュ波形に基づいて動作体の動作を示す情報を取得することで、少なくとも1回の静止動作を含む動作体の動作を精度よく検知することが可能になる。
【0009】
本開示の動作検知方法は、少なくとも1回の静止動作を含む動作体の動作を取得する動作検知方法であって、前記動作体に向けて所定周波数帯の電波を送信し、前記動作体で反射した反射電波を受信し、前記反射電波から直交復調により同相信号および直交位相信号を抽出すると共に、抽出した前記同相信号および前記直交位相信号に基づいてリサージュ波形を取得し、前記リサージュ波形を形成する複数の点のIQ直交座標系における座標に基づいて、前記リサージュ波形の中心と前記IQ直交座標系の原点とのI軸方向における第1推定距離と、前記リサージュ波形の前記中心と前記IQ直交座標系の前記原点とのQ軸方向における第2推定距離とを取得し、前記第1および第2推定距離に基づいて前記リサージュ波形のオフセットを補正し、補正した前記リサージュ波形に基づいて前記動作を示す情報を取得するものである。
【0010】
かかる方法によれば、第1および第2推定距離に基づいてオフセットされたリサージュ波形に基づいて動作体の動作を示す情報を取得することで、少なくとも1回の静止動作を含む動作体の動作を精度よく検知することが可能になる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
ロータ
2日前
株式会社アイシン
空気袋
13日前
株式会社アイシン
ロータ
4日前
株式会社アイシン
ステータ
2日前
株式会社アイシン
駆動装置
3日前
株式会社アイシン
電子機器
3日前
株式会社アイシン
制御装置
3日前
株式会社アイシン
制御装置
3日前
株式会社アイシン
制御装置
3日前
株式会社アイシン
回転電機
5日前
株式会社アイシン
回転電機
5日前
株式会社アイシン
ステータ
2日前
株式会社アイシン
検知装置
3日前
株式会社アイシン
ステータ
2日前
株式会社アイシン
ステータ
2日前
株式会社アイシン
保護装置
3日前
株式会社アイシン
回転電機
9日前
株式会社アイシン
駆動装置
11日前
株式会社アイシン
車体構造
9日前
株式会社アイシン
制御装置
9日前
株式会社アイシン
鋳ぐるみ品
13日前
株式会社アイシン
温度調節器
23日前
株式会社アイシン
温度調節器
23日前
株式会社アイシン
温度調節器
9日前
株式会社アイシン
レーダ装置
3日前
株式会社アイシン
温度調節器
13日前
株式会社アイシン
電解システム
4日前
株式会社アイシン
ポンプケース
16日前
株式会社アイシン
衝撃吸収部材
3日前
株式会社アイシン
振動発生装置
11日前
株式会社アイシン
運転支援装置
3日前
株式会社アイシン
運転支援装置
3日前
株式会社アイシン
車両制御装置
3日前
株式会社アイシン
マニホールド
11日前
株式会社アイシン
センサ固定具
4日前
株式会社アイシン
開閉システム
10日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ