TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025150647
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051646
出願日
2024-03-27
発明の名称
車両制御装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B62D
6/00 20060101AFI20251002BHJP(鉄道以外の路面車両)
要約
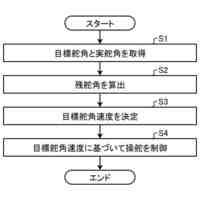
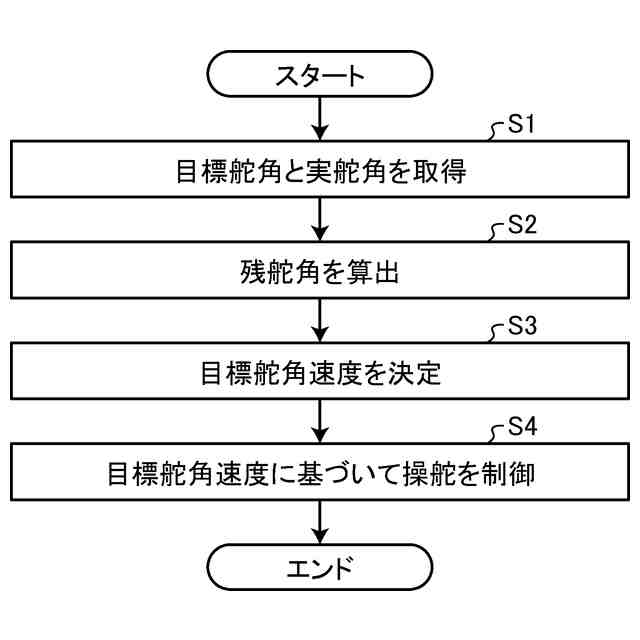
【課題】車両の操舵制御を行う場合に実舵角が目標舵角と一致したタイミングでの実舵角加速度の急激な変化を回避する。
【解決手段】実施形態の車両制御装置は、車両の操舵制御を行う場合の目標舵角、および、所定のセンサによるデータに基づいて算出された実舵角のデータを取得する取得部と、前記目標舵角と前記実舵角の差分に基づいて、残舵角を算出する算出部と、残角度が小さいほど小さな上限舵角速度が設定されている上限舵角速度関係情報、および、前記算出部によって算出された前記残角度に基づいて、目標舵角速度を決定する決定部と、前記目標舵角速度に基づいて操舵を制御する制御部と、を備える。
【選択図】図9
特許請求の範囲
【請求項1】
車両の操舵制御を行う場合の目標舵角、および、所定のセンサによるデータに基づいて算出された実舵角のデータを取得する取得部と、
前記目標舵角と前記実舵角の差分に基づいて、残舵角を算出する算出部と、
残角度が小さいほど小さな上限舵角速度が設定されている上限舵角速度関係情報、および、前記算出部によって算出された前記残角度に基づいて、目標舵角速度を決定する決定部と、
前記目標舵角速度に基づいて操舵を制御する制御部と、を備える車両制御装置。
続きを表示(約 170 文字)
【請求項2】
前記上限舵角速度関係情報において、前記上限舵角速度は所定の上限舵角速度閾値以下になるように設定されている、請求項1に記載の車両制御装置。
【請求項3】
前記上限舵角速度関係情報において、残角度が0度から所定角度までに関しては、残角度と前記上限舵角速度が比例関係に設定されている、請求項1に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、車両制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来から、車両を目標経路に沿って走行させる技術の開発が進められている。その際、車両の操舵制御に関しては、例えば、目標舵角(目標操舵角)と実舵角に基づいたフィードバック制御が実行される。
【0003】
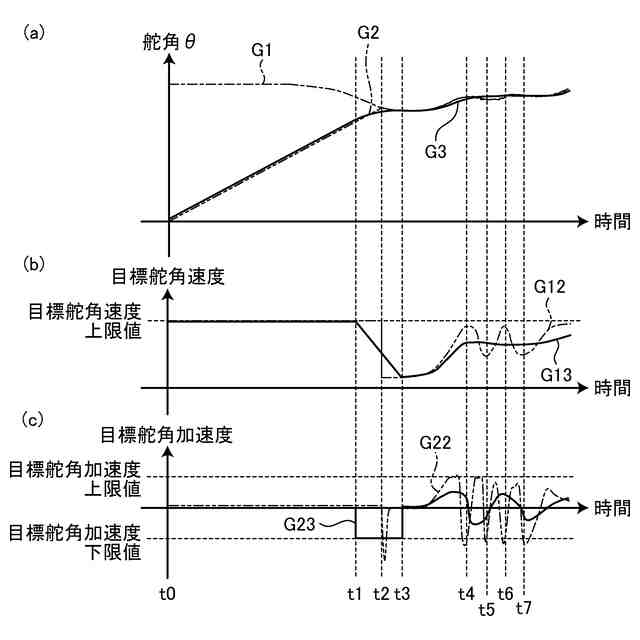
その場合、操舵制御は周期的に行われるので目標舵角が離散的(階段状)に変化することになり、目標舵角に対して実舵角がオーバーシュートとアンダーシュートを繰り返して目標舵角と実舵角との偏差が収束せず、実舵角が振動してしまうことがあるという問題があった。
【0004】
この問題を解消するために、例えば、フィードバック制御の1つであるPID制御において、目標舵角と実舵角との偏差の積分値の上限値を設定することで、一定の改善効果を得られる従来技術がある。
【先行技術文献】
【特許文献】
【0005】
特開2013-112187号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述の従来技術では、実舵角が目標舵角と一致したタイミングで両者の偏差が急に0になるので、目標舵角加速度が急激に変化することがある。その場合、実舵角加速度も追従して急激に変化するので、乗員の乗り心地や操舵制御アクチュエータへの負荷等の点で好ましくない。
【0007】
そこで、本発明は、上記事情に鑑みてなされたものであり、車両の操舵制御を行う場合に実舵角が目標舵角と一致したタイミングでの実舵角加速度の急激な変化を回避することができる車両制御装置を提供することを課題とする。
【課題を解決するための手段】
【0008】
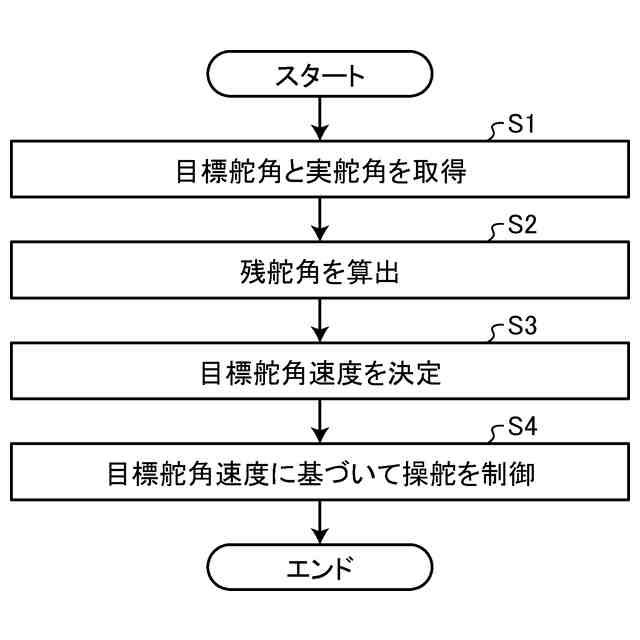
上記課題を解決するために、実施形態の車両制御装置は、車両の操舵制御を行う場合の目標舵角、および、所定のセンサによるデータに基づいて算出された実舵角のデータを取得する取得部と、前記目標舵角と前記実舵角の差分に基づいて、残舵角を算出する算出部と、残角度が小さいほど小さな上限舵角速度が設定されている上限舵角速度関係情報、および、前記算出部によって算出された前記残角度に基づいて、目標舵角速度を決定する決定部と、前記目標舵角速度に基づいて操舵を制御する制御部と、を備える。
【0009】
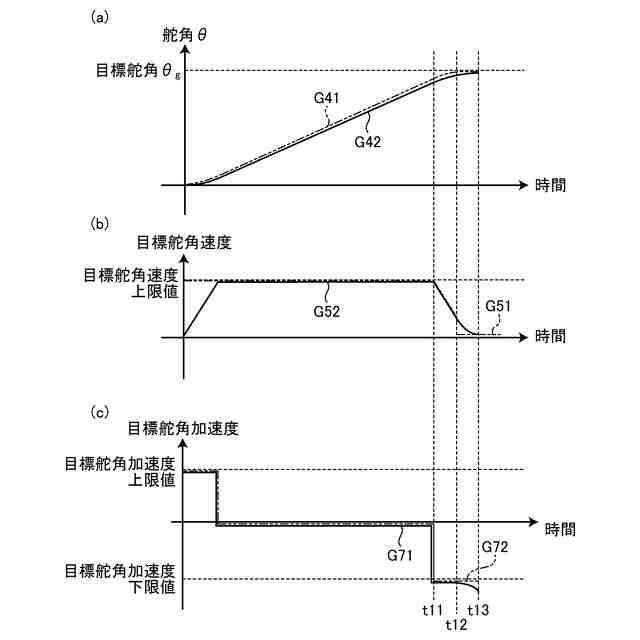
この構成によれば、車両の操舵制御を行う場合に、残角度が小さいほど小さな上限舵角速度が設定されている上限舵角速度関係情報、および、算出部によって算出された残角度に基づいて目標舵角速度を決定することで、実舵角が目標舵角と一致したタイミングでの実舵角加速度の急激な変化を回避することができる。
【図面の簡単な説明】
【0010】
図1は、実施形態の車両の車室の一部が透視された状態が示された例示的な斜視図である。
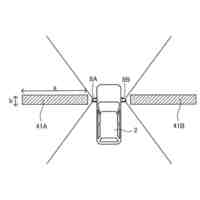
図2は、実施形態の車両の例示的な平面図(俯瞰図)である。
図3は、実施形態の車両のダッシュボードの一例の車両後方からの視野での図である。
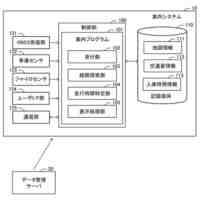
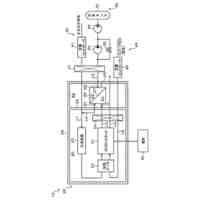
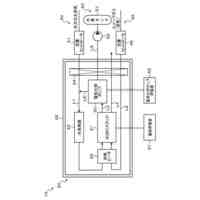
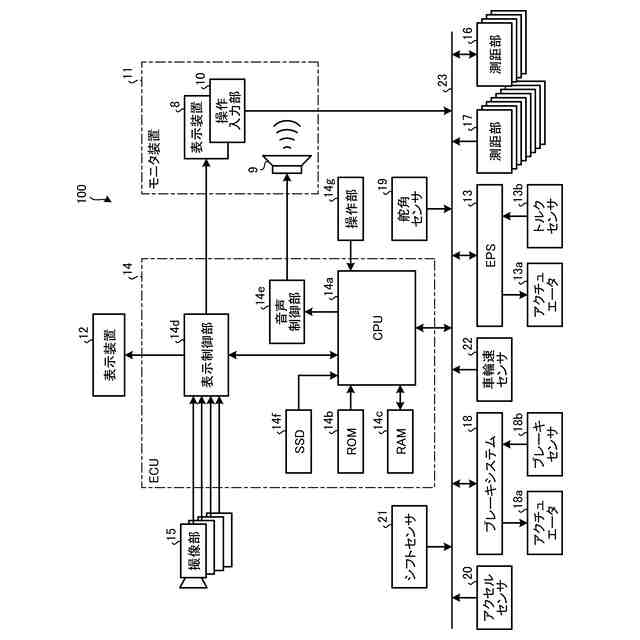
図4は、実施形態の車両制御システムの構成の例示的なブロック図である。
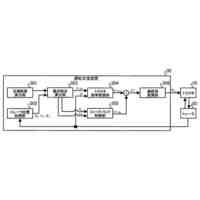
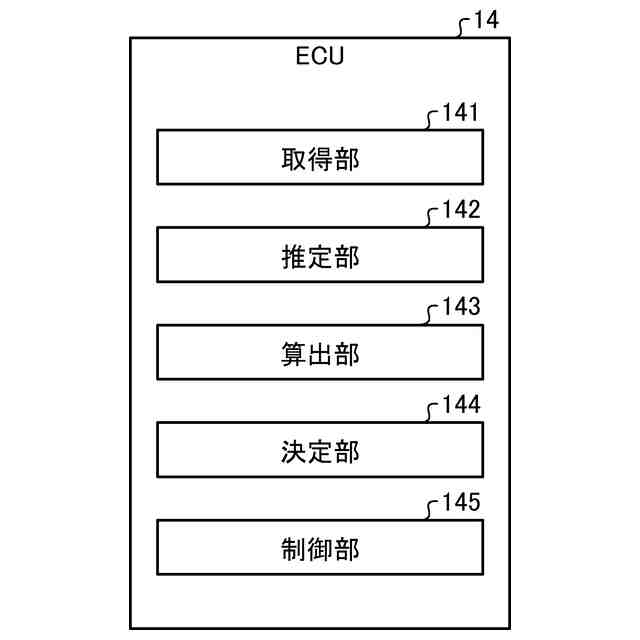
図5は、実施形態におけるECUの機能構成図である。
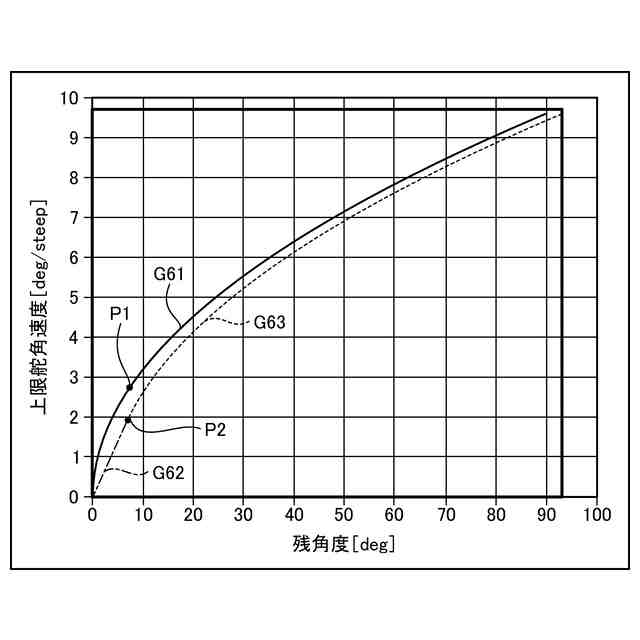
図6は、実施形態における第1の手法と第2の手法それぞれにおける上限舵角速度関係情報を示すグラフである。
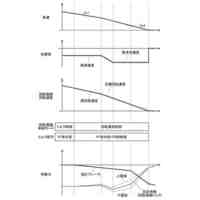
図7は、従来技術と実施形態の第1の手法それぞれにおける舵角等の時間的推移を示すグラフである。
図8は、実施形態における第1の手法と第2の手法それぞれにより決定された目標舵角速度等の時間的推移を示すグラフである。
図9は、実施形態の車両制御システムによる処理を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
ロータ
25日前
株式会社アイシン
ロータ
21日前
株式会社アイシン
ロータ
27日前
株式会社アイシン
ステータ
25日前
株式会社アイシン
ステータ
25日前
株式会社アイシン
制御装置
26日前
株式会社アイシン
制御装置
26日前
株式会社アイシン
駆動装置
26日前
株式会社アイシン
検知装置
26日前
株式会社アイシン
保護装置
26日前
株式会社アイシン
ステータ
25日前
株式会社アイシン
制御装置
26日前
株式会社アイシン
電子機器
26日前
株式会社アイシン
回転電機
28日前
株式会社アイシン
回転電機
28日前
株式会社アイシン
ステータ
25日前
株式会社アイシン
歯車機構
21日前
株式会社アイシン
レーダ装置
26日前
株式会社アイシン
案内システム
26日前
株式会社アイシン
センサ固定具
27日前
株式会社アイシン
運転支援装置
26日前
株式会社アイシン
運転支援装置
25日前
株式会社アイシン
運転支援装置
25日前
株式会社アイシン
駐車支援装置
28日前
株式会社アイシン
出庫支援装置
26日前
株式会社アイシン
超音波センサ
27日前
株式会社アイシン
運転支援装置
26日前
株式会社アイシン
衝撃吸収部材
26日前
株式会社アイシン
超音波センサ
27日前
株式会社アイシン
乗員検知装置
26日前
株式会社アイシン
電解システム
27日前
株式会社アイシン
車両制御装置
26日前
株式会社アイシン
電解システム
26日前
株式会社アイシン
車両制御装置
1か月前
株式会社アイシン
ドア支持装置
25日前
株式会社アイシン
牽引支援装置
25日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ