TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025148927
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049293
出願日
2024-03-26
発明の名称
自己位置ずれ検出装置
出願人
日野自動車株式会社
代理人
個人
,
個人
,
個人
主分類
G01C
21/30 20060101AFI20251001BHJP(測定;試験)
要約
【課題】自己位置推定のずれを検出すること。
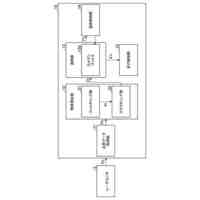
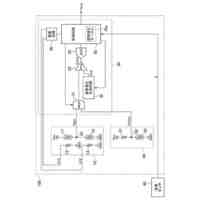
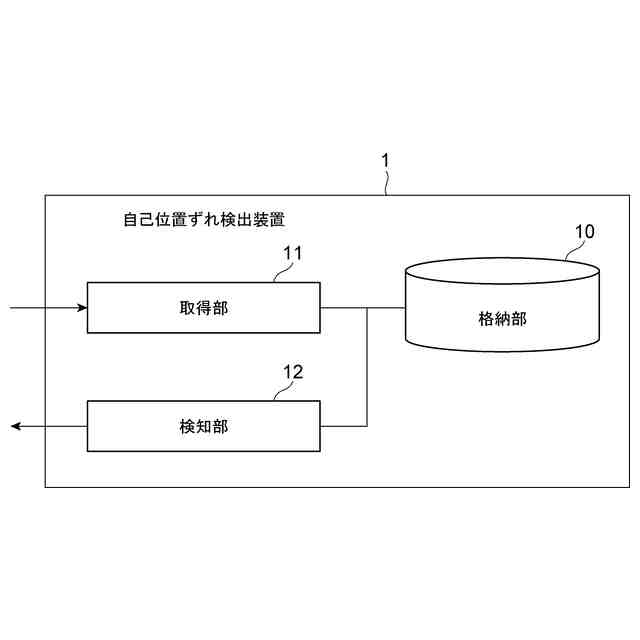
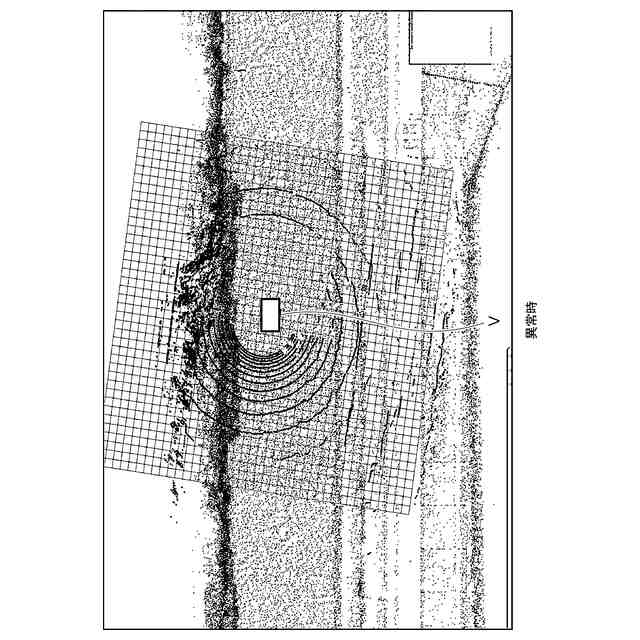
【解決手段】自己位置ずれ検出装置1は、自己位置推定の際のリモートセンシングの結果と地図データとのマッチングにおける、マッチングの度合いを示すマッチング度と、マッチングが収束するまでに反復された計算の回数を示す反復回数とを取得する取得部11と、取得部11によって取得されたマッチング度と反復回数とに基づいて、自己位置推定のずれを検出する検出部12と、を備える。自己位置推定は、車両Vに関し、リモートセンシングは、車両Vに備えられたLiDAR(Light Detection And Ranging)により行われてもよい。検出部12は、複数のマッチング度と複数の反復回数とに基づいてずれを検出してもよい。
【選択図】図1
特許請求の範囲
【請求項1】
自己位置推定の際のリモートセンシングの結果と地図データとのマッチングにおける、前記マッチングの度合いを示すマッチング度と、前記マッチングが収束するまでに反復された計算の回数を示す反復回数とを取得する取得部と、
前記取得部によって取得された前記マッチング度と前記反復回数とに基づいて、前記自己位置推定のずれを検出する検出部と、
を備える自己位置ずれ検出装置。
続きを表示(約 600 文字)
【請求項2】
前記自己位置推定は、車両に関し、
前記リモートセンシングは、前記車両に備えられたLiDAR(Light Detection And Ranging)により行われる、
請求項1に記載の自己位置ずれ検出装置。
【請求項3】
前記検出部は、複数の前記マッチング度と複数の前記反復回数とに基づいて前記ずれを検出する、
請求項1に記載の自己位置ずれ検出装置。
【請求項4】
前記検出部は、複数の前記マッチング度の平均と前記反復回数とに基づいて前記ずれを検出する、
請求項1に記載の自己位置ずれ検出装置。
【請求項5】
前記検出部は、前記マッチング度と複数の前記反復回数のばらつきとに基づいて前記ずれを検出する、
請求項1に記載の自己位置ずれ検出装置。
【請求項6】
前記検出部は、複数の前記マッチング度の平均と複数の前記反復回数のばらつきとに基づいて前記ずれを検出する、
請求項1に記載の自己位置ずれ検出装置。
【請求項7】
前記検出部は、過去の複数の前記マッチング度と過去の複数の前記反復回数とに基づいて算出された、前記ずれを検出可能な基準又は学習済みモデルにさらに基づいて、前記ずれを検出する、
請求項1に記載の自己位置ずれ検出装置。
発明の詳細な説明
【技術分野】
【0001】
本開示の一側面は、自己位置推定のずれを検出する自己位置ずれ検出装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
下記特許文献1では、自車両に対する自車両の周囲の物標の相対位置を検出し、予め記憶した物標の地図上の位置と相対位置とに基づき自車両の自己位置を推定する自己位置推定方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-6797号
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記自己位置推定方法では、推定した自車両の自己位置のずれを検出することはできない。そこで、自己位置推定のずれを検出することが望まれている。
【課題を解決するための手段】
【0005】
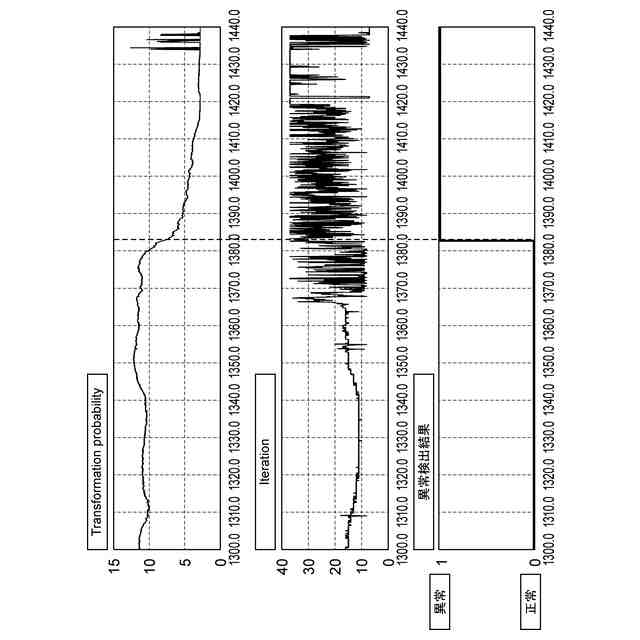
本開示の一側面に係る自己位置ずれ検出装置は、自己位置推定の際のリモートセンシングの結果と地図データとのマッチングにおける、マッチングの度合いを示すマッチング度と、マッチングが収束するまでに反復された計算の回数を示す反復回数とを取得する取得部と、取得部によって取得されたマッチング度と反復回数とに基づいて、自己位置推定のずれを検出する検出部と、を備える。このような側面においては、マッチング度と反復回数とに基づいて自己位置推定のずれが検出される。すなわち、自己位置推定のずれを検出することができる。
【0006】
また、本開示の一側面に係る自己位置ずれ検出装置において、自己位置推定は、車両に関してもよく、リモートセンシングは、車両に備えられたLiDAR(Light Detection And Ranging)により行われてもよい。このような側面においては、車両の自己位置推定の際の当該車両に備えられたLiDARによるリモートセンシングの結果と地図データとのマッチングに関する自己位置推定のずれが検出される。これにより例えば、車両に備えられたLiDARの故障を認識することができる。
【0007】
また、本開示の一側面に係る自己位置ずれ検出装置の検出部は、複数のマッチング度と複数の反復回数とに基づいてずれを検出してもよい。このような側面においては、複数のマッチング度と複数の反復回数とに基づくことで、自己位置推定のずれをより正確に検出することができる。
【0008】
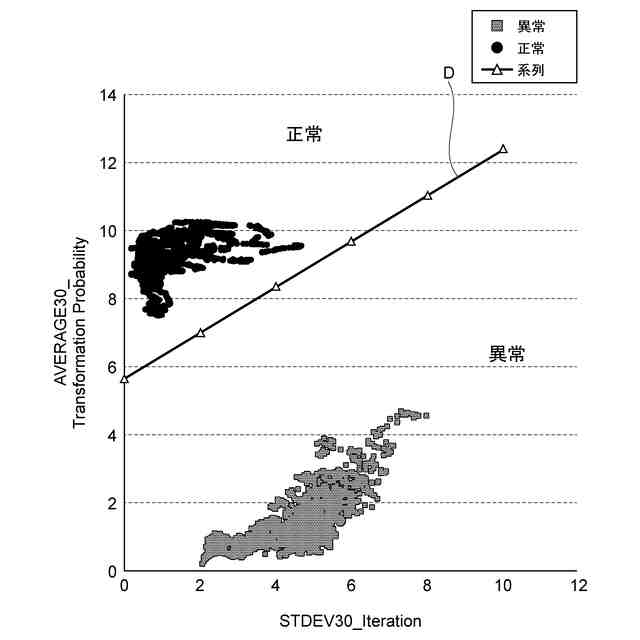
また、本開示の一側面に係る自己位置ずれ検出装置の検出部は、複数のマッチング度の平均と反復回数とに基づいてずれを検出してもよい。このような側面においては、複数のマッチング度の平均と反復回数とに基づくことで、自己位置推定のずれをより正確に検出することができる。
【0009】
また、本開示の一側面に係る自己位置ずれ検出装置の検出部は、マッチング度と複数の反復回数のばらつきとに基づいてずれを検出してもよい。このような側面においては、マッチング度と複数の反復回数のばらつきとに基づくことで、自己位置推定のずれをより正確に検出することができる。
【0010】
また、本開示の一側面に係る自己位置ずれ検出装置の検出部は、複数のマッチング度の平均と複数の反復回数のばらつきとに基づいてずれを検出してもよい。このような側面においては、複数のマッチング度の平均と複数の反復回数のばらつきとに基づくことで、自己位置推定のずれをより正確に検出することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日野自動車株式会社
走行制御装置
11日前
日野自動車株式会社
物体検出装置及び物体検出方法
3日前
日野自動車株式会社
自動車の電気部品の配置構造
3日前
個人
メジャー文具
13日前
個人
アクセサリー型テスター
6日前
個人
高精度同時多点測定装置
5日前
ユニパルス株式会社
ロードセル
12日前
日本精機株式会社
位置検出装置
19日前
日本精機株式会社
位置検出装置
19日前
日本精機株式会社
位置検出装置
19日前
大和製衡株式会社
組合せ秤
24日前
大和製衡株式会社
組合せ秤
24日前
アズビル株式会社
圧力センサ
18日前
エイブリック株式会社
磁気センサ回路
18日前
株式会社ユーシン
操作検出装置
21日前
株式会社ヨコオ
ソケット
11日前
株式会社東芝
センサ
24日前
株式会社ヨコオ
ソケット
12日前
株式会社東芝
センサ
24日前
トヨタ自動車株式会社
検査装置
21日前
株式会社チノー
放射光測温装置
12日前
ダイキン工業株式会社
監視装置
10日前
トヨタ自動車株式会社
監視装置
11日前
TDK株式会社
ガスセンサ
17日前
ローム株式会社
半導体装置
4日前
ローム株式会社
半導体装置
4日前
TDK株式会社
ガスセンサ
12日前
株式会社東芝
重量測定装置
17日前
TDK株式会社
磁気センサ
11日前
TDK株式会社
ガスセンサ
18日前
東レエンジニアリング株式会社
計量装置
21日前
長崎県
形状計測方法
6日前
株式会社熊谷組
RI計測装置
19日前
中国電力株式会社
電柱管理システム
10日前
ダイハツ工業株式会社
移動支援装置
11日前
日本特殊陶業株式会社
センサ
10日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ