TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025152046
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024053753
出願日
2024-03-28
発明の名称
走行制御装置
出願人
日野自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
30/10 20060101AFI20251002BHJP(車両一般)
要約
【課題】進行方向を切り替える場合において処理負荷を抑制しつつ自動運転車両を走行させる。
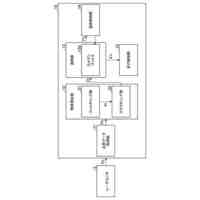
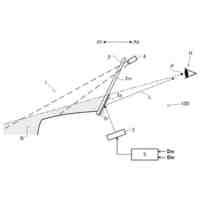
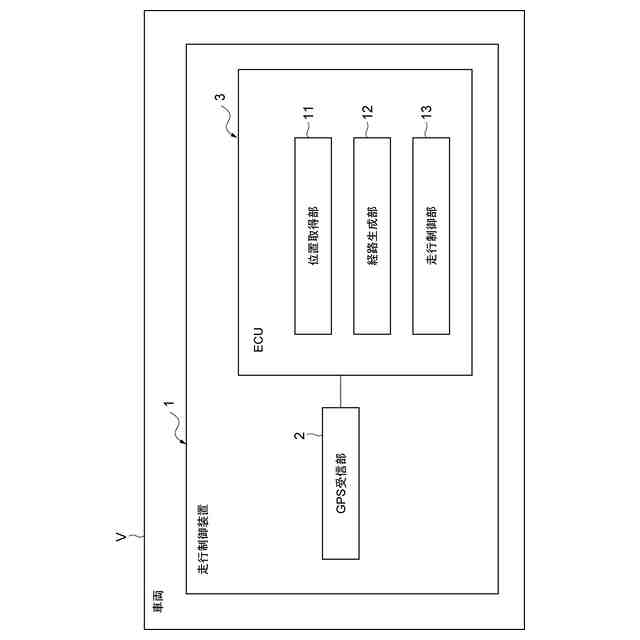
【解決手段】走行制御装置1は、車両Vが通過すべき目標位置情報を含む目標経路Rを生成する経路生成部12と、目標経路Rに沿って走行するように車両Vの走行を制御する走行制御部13とを備える。走行制御部13は、車両Vの進行方向を切り替える場合、進行方向切替後において、進行方向切替前の目標経路Rを逆に辿るように車両Vの走行を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
自動運転車両の走行を制御する走行制御装置であって、
前記自動運転車両が通過すべき目標位置情報を含む目標経路を生成する経路生成部と、
前記目標経路に沿って走行するように前記自動運転車両の走行を制御する走行制御部と、
を備え、
前記走行制御部は、前後方向における前記自動運転車両の進行方向を切り替える場合、進行方向切替後において、進行方向切替前の前記目標経路を逆に辿るように前記自動運転車両の走行を制御する、走行制御装置。
続きを表示(約 350 文字)
【請求項2】
前記自動運転車両の位置を示す車両位置情報を取得する位置取得部を備え、
前記走行制御部は、進行方向切替後において前記自動運転車両の走行を制御する場合、進行方向切替前の前記目標経路に沿った前記車両位置情報の変化に基づいて、前記自動運転車両の走行距離を制御する、請求項1に記載の走行制御装置。
【請求項3】
前記自動運転車両の位置を示す車両位置情報を取得する位置取得部を備え、
前記走行制御部は、前記車両位置情報に基づいて進行方向切替前の前記目標経路に対する前記自動運転車両の走行位置のずれを算出し、算出された前記ずれに基づいて、進行方向切替後において進行方向切替前の前記目標経路を逆に辿るように前記自動運転車両の走行を制御する、請求項1に記載の走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動運転車両の走行を制御する走行制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
目標地点までの目標経路を生成し、生成した目標経路に沿って自動で走行する自動運転車両がある。このような自動運転車両が、例えば特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-151041号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したような自動運転車両では、自動運転車両を走行させるために、その都度、目標経路を生成する必要がある。このため、例えば、前後方向の進行方向を切り替える場合においても、進行方向切替前及び進行方向切替後の両方において、目標経路を生成している。
【0005】
そこで、本発明は、進行方向を切り替える場合において処理負荷を抑制しつつ自動運転車両を走行させることが可能な走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る走行制御装置は、[1]「自動運転車両の走行を制御する走行制御装置であって、前記自動運転車両が通過すべき目標位置情報を含む目標経路を生成する経路生成部と、前記目標経路に沿って走行するように前記自動運転車両の走行を制御する走行制御部と、を備え、前記走行制御部は、前後方向における前記自動運転車両の進行方向を切り替える場合、進行方向切替後において、進行方向切替前の前記目標経路を逆に辿るように前記自動運転車両の走行を制御する、走行制御装置。」である。
【0007】
この走行制御装置において経路生成部は、自動運転車両が通過すべき目標位置情報を含む目標経路を生成する。走行制御部は、経路生成部で生成された進行方向切替前の目標経路に基づいて、進行方向切替後における走行の制御を行う。これにより、走行制御装置は、自動運転車両の進行方向を切り替える場合において、処理負荷を抑制しつつ自動運転車両を走行させることができる。
【0008】
上記の走行制御装置は、[2]「前記自動運転車両の位置を示す車両位置情報を取得する位置取得部を備え、前記走行制御部は、進行方向切替後において前記自動運転車両の走行を制御する場合、進行方向切替前の前記目標経路に沿った前記車両位置情報の変化に基づいて、前記自動運転車両の走行距離を制御する、上記[1]に記載の走行制御装置。」であってもよい。この場合、走行制御装置は、車速センサ等を用いることなく、自動運転車両の車両位置情報に基づいて走行距離を制御することができる。また、走行制御部は、進行方向切替前の目標経路に沿った車両位置情報の変化に基づいて走行距離を制御する。これにより、走行制御部は、自動運転車両の走行距離をより適切に制御することができる。
【0009】
上記の走行制御装置は、[3]「前記自動運転車両の位置を示す車両位置情報を取得する位置取得部を備え、前記走行制御部は、前記車両位置情報に基づいて進行方向切替前の前記目標経路に対する前記自動運転車両の走行位置のずれを算出し、算出された前記ずれに基づいて、進行方向切替後において進行方向切替前の前記目標経路を逆に辿るように前記自動運転車両の走行を制御する、上記[1]又は[2]に記載の走行制御装置。」であってもよい。この走行制御装置では、進行方向切替前の目標経路と、進行方向切替前の自動運転車両の実際の走行位置とのずれを予め算出することができる。すなわち、走行制御部は、進行方向切替後の走行の前に、轍等によって生じる自動運転車両の目標経路からのずれの傾向を予め把握できる。これにより走行制御部は、進行方向切替後において、進行方向切替前の目標経路により精度良く沿うように自動運転車両の走行の制御を行うことができる。
【発明の効果】
【0010】
本発明によれば、進行方向を切り替える場合において処理負荷を抑制しつつ自動運転車両を走行させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日野自動車株式会社
シフト装置
1日前
日野自動車株式会社
車両点検装置
16日前
日野自動車株式会社
方位ずれ検出装置
16日前
日野自動車株式会社
車両用サイドドア構造
14日前
日野自動車株式会社
物体検出装置及び物体検出方法
1か月前
日野自動車株式会社
レーダユニット、調整システム、及び、調整方法
28日前
日野自動車株式会社
自動車の電気部品の配置構造
1か月前
個人
カーテント
5か月前
個人
タイヤレバー
3か月前
個人
前輪キャスター
2か月前
個人
上部一体型自動車
1か月前
個人
ルーフ付きトライク
3か月前
個人
空間形成装置
22日前
個人
車輪清掃装置
5か月前
個人
ホイルのボルト締結
4か月前
個人
タイヤ脱落防止構造
2か月前
日本精機株式会社
表示装置
3か月前
個人
キャンピングトライク
5か月前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
5か月前
個人
マスタシリンダ
1か月前
日本精機株式会社
照明装置
17日前
井関農機株式会社
作業車両
5か月前
日本精機株式会社
表示装置
3か月前
個人
車両通過構造物
3か月前
日本精機株式会社
表示装置
3か月前
個人
キャンピングトレーラー
5か月前
個人
常設収納型サンバイザー
28日前
個人
乗合路線バスの客室装置
4か月前
個人
アクセルのソフトウェア
4か月前
個人
車両用スリップ防止装置
4か月前
株式会社ニフコ
収納装置
2か月前
株式会社豊田自動織機
産業車両
17日前
個人
回転窓ワイパー装置
22日前
日本精機株式会社
画像投映装置
1か月前
日本精機株式会社
車載表示装置
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ