TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025147441
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024047691
出願日
2024-03-25
発明の名称
走行支援方法、走行支援装置、コンピュータプログラム、および走行支援システム
出願人
住友電気工業株式会社
,
NTTドコモビジネス株式会社
代理人
個人
,
個人
主分類
G08G
1/09 20060101AFI20250930BHJP(信号)
要約
【課題】移動体の遠隔監視および遠隔操作の少なくとも一方の作業を行うオペレータに、移動体の遠隔監視または遠隔操作のために必要な情報を提供することのできる走行支援方法を提供する。
【解決手段】自律走行可能な移動体の走行を支援するための走行支援方法であって、前記移動体に搭載されたカメラにより撮影された画像に基づいて、前記画像中に存在する人物を検出するステップと、前記人物の検出結果に基づいて、前記移動体から前記人物までの距離を算出するステップと、前記人物の検出結果および前記人物までの距離に基づいて前記人物の身長を算出するステップと、前記身長に基づいて、前記人物に関する危険度を、当該人物に付与するステップとを含む。
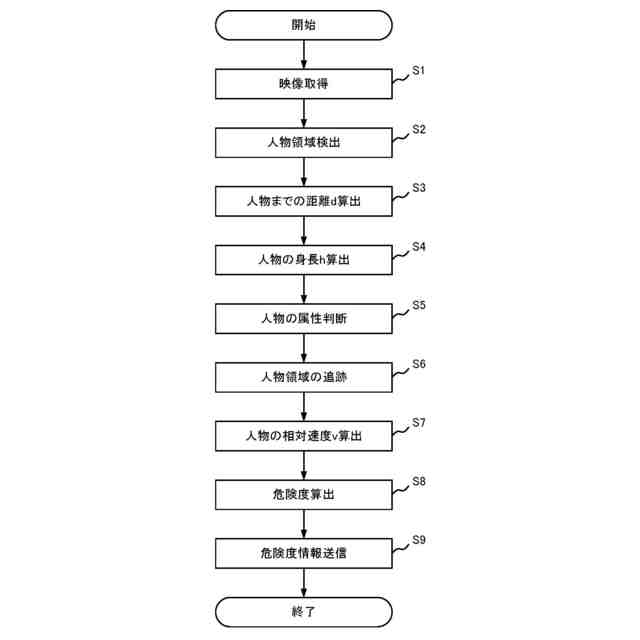
【選択図】図9
特許請求の範囲
【請求項1】
自律走行可能な移動体の走行を支援するための走行支援方法であって、
前記移動体に搭載されたカメラにより撮影された画像に基づいて、前記画像中に存在する人物を検出するステップと、
前記人物の検出結果に基づいて、前記移動体から前記人物までの距離を算出するステップと、
前記人物の検出結果および前記人物までの距離に基づいて前記人物の身長を算出するステップと、
前記身長に基づいて、前記人物に関する危険度を、当該人物に付与するステップとを含む、走行支援方法。
続きを表示(約 1,600 文字)
【請求項2】
前記人物に付与するステップは、
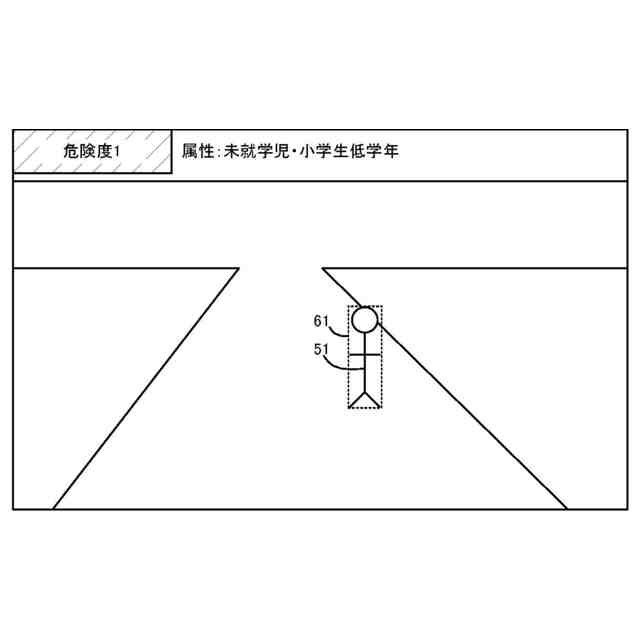
前記身長に基づいて、前記人物を第1のクラスに分類するステップと、
前記第1のクラスに対応する前記危険度を、前記第1のクラスに分類された前記人物に付与するステップとを含む、請求項1に記載の走行支援方法。
【請求項3】
前記人物に付与するステップは、
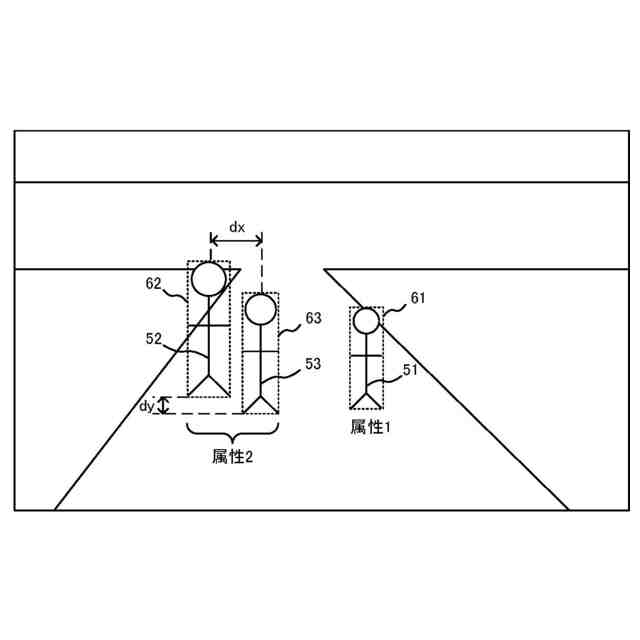
複数の前記人物の身長および検出結果に基づいて、密集している複数の前記人物を第2のクラスに分類するステップと、
前記第2のクラスに対応する前記危険度を、前記第2のクラスに分類された複数の前記人物のそれぞれ、および前記第2のクラスに分類された複数の前記人物の集団の少なくとも一方に付与するステップとを含む、請求項1または請求項2に記載の走行支援方法。
【請求項4】
前記走行支援方法は、
前記人物の検出結果に基づいて、前記人物の速度を算出するステップと、
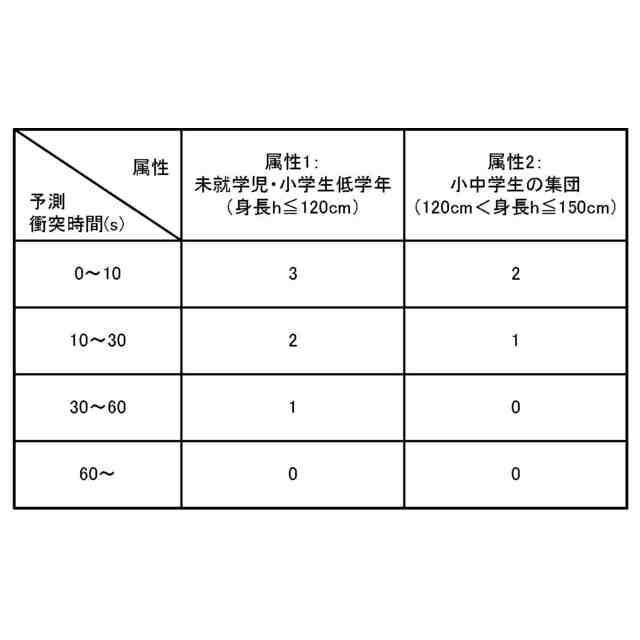
前記人物までの距離および前記人物の速度に基づいて、前記移動体が前記人物に衝突するまでの予測時間を算出するステップとをさらに含み、
前記人物に付与するステップでは、さらに、前記予測時間に基づいて、前記危険度を、前記人物に付与する、請求項1または請求項2に記載の走行支援方法。
【請求項5】
前記移動体に対する遠隔監視および遠隔操作の少なくとも一方の作業を行うオペレータに対して、前記画像中に存在する前記人物の前記危険度に基づく通知を行うステップをさらに含む、請求項1または請求項2に記載の走行支援方法。
【請求項6】
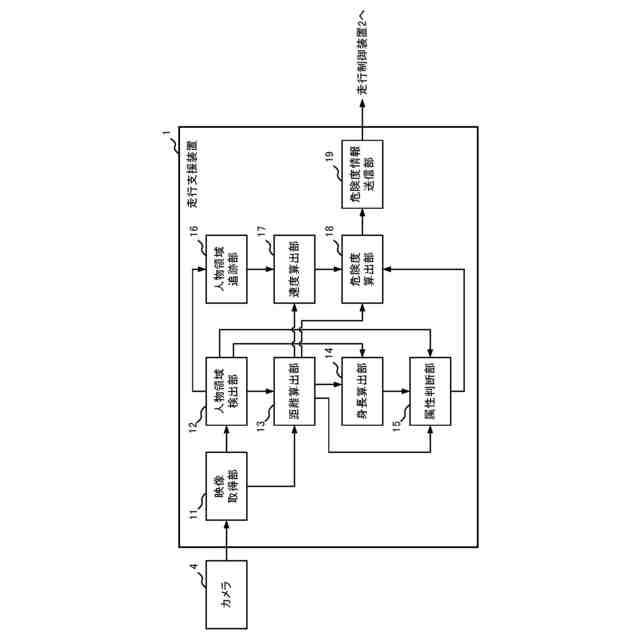
自律走行可能な移動体の走行を支援するための走行支援装置であって、
前記移動体に搭載されたカメラにより撮影された画像に基づいて、前記画像中に存在する人物を検出する検出部と、
前記人物の検出結果に基づいて、前記移動体から前記人物までの距離を算出する距離算出部と、
前記人物の検出結果および前記人物までの距離に基づいて前記人物の身長を算出する身長算出部と、
前記身長に基づいて、前記人物に関する危険度を、当該人物に付与する危険度付与部とを備える、走行支援装置。
【請求項7】
コンピュータを、自律走行可能な移動体の走行を支援するための走行支援装置として機能させるためのコンピュータプログラムであって、
前記コンピュータを、
前記移動体に搭載されたカメラにより撮影された画像に基づいて、前記画像中に存在する人物を検出する検出部と、
前記人物の検出結果に基づいて、前記移動体から前記人物までの距離を算出する距離算出部と、
前記人物の検出結果および前記人物までの距離に基づいて前記人物の身長を算出する身長算出部と、
前記身長に基づいて、前記人物に関する危険度を、当該人物に付与する危険度付与部として機能させる、コンピュータプログラム。
【請求項8】
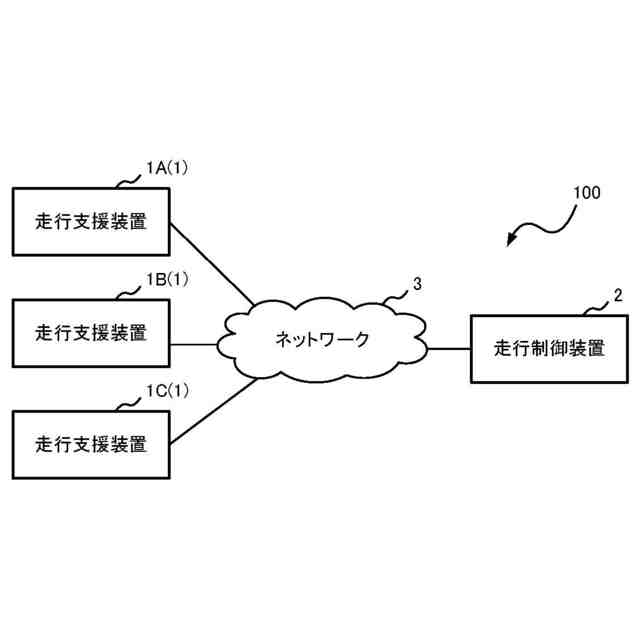
自律走行可能な移動体の走行を支援するための走行支援システムであって、
走行支援装置と、
前記走行支援装置にネットワークを介して接続される表示制御装置とを備え、
前記走行支援装置は、
前記移動体に搭載されたカメラにより撮影された画像に基づいて、前記画像中に存在する人物を検出する検出部と、
前記人物の検出結果に基づいて、前記移動体から前記人物までの距離を算出する距離算出部と、
前記人物の検出結果および前記人物までの距離に基づいて前記人物の身長を算出する身長算出部と、
前記身長に基づいて、前記人物に関する危険度を、当該人物に付与する危険度付与部と、
前記人物に付与された前記危険度に基づく危険度情報を前記表示制御装置に送信する危険度情報送信部とを含み、
前記表示制御装置は、前記走行支援装置から受信した前記危険度情報に基づく画面表示を行う、
走行支援システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、走行支援方法、走行支援装置、コンピュータプログラム、および走行支援システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
非特許文献1には、自律走行するロボットに搭載されたカメラの映像から、ロボットの周囲の他の移動体、人、または路上落下物を検出し、検出結果を当該ロボットに対する遠隔監視および遠隔操作の少なくとも一方の作業を行うオペレータに通知するシステムが開示されている。
【0003】
非特許文献2には、自動運転車に搭載されたカメラにより撮影された映像を管制センターのサーバに送信し、サーバが映像から物体検出を行うシステムが開示されている。
【先行技術文献】
【非特許文献】
【0004】
“パナソニック、フルリモート型配送ロボットの道路使用許可を取得”,[online],2022年4月18日,IoTNEWS,株式会社アールジーンIoTNEWS事業部,[2023年11月13日検索],インターネット<URL: https://iotnews.jp/smart-city/200568/>
“NEC、AIで車などの「遠隔見守り」を高度化する「学習型メディア送信制御技術」を開発”,[online],2021年1月12日,DIGITAL SHIFT TIMES,株式会社デジタルホールディングス,[2023年11月13日検索],インターネット<URL: https://digital-shift.jp/flash_news/FN210112_8>
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、非特許文献1のシステムでは、検出結果をオペレータに通知できるものの、オペレータは、通知された検出結果が映像中のどの物体に対するものかを瞬時に判断することが困難である。このため、一人のオペレータが複数の移動体を並行して監視することが困難である。
【0006】
非特許文献2のシステムでは、自動運転車とサーバとの間の伝送路の通信帯域が狭くなった場合には、映像の画質を落とす等の処理をした上で自動運転車からサーバに映像を送信しなければならない。このため、サーバは、低画質の映像から物体検出を行わなければならず、物体の検出漏れや誤検出が生じる恐れがある。
【0007】
本開示は、このような事情に鑑みてなされたものであり、移動体の遠隔監視および遠隔操作の少なくとも一方の作業を行うオペレータに、移動体の遠隔監視または遠隔操作のために必要な情報を提供することのできる走行支援方法、走行支援装置、コンピュータプログラム、および走行支援システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本開示の一態様に係る走行支援方法は、自律走行可能な移動体の走行を支援するための走行支援方法であって、前記移動体に搭載されたカメラにより撮影された画像に基づいて、前記画像中に存在する人物を検出するステップと、前記人物の検出結果に基づいて、前記移動体から前記人物までの距離を算出するステップと、前記人物の検出結果および前記人物までの距離に基づいて前記人物の身長を算出するステップと、前記身長がより低いほどより高い危険度を、前記人物に付与するステップとを含む。
【0009】
本発明は、このような特徴的な処理部を備える走行支援方法として実現できるだけでなく、かかる特徴的なステップに対応する処理部を備える走行支援装置として実現したり、コンピュータを走行支援装置として機能させるためのコンピュータプログラムとして実現できる。また、走行支援装置の一部又は全部を実現する半導体集積回路として実現したり、走行支援装置を含む走行支援システムとして実現できる。
【発明の効果】
【0010】
本開示によると、移動体の遠隔監視および遠隔操作の少なくとも一方の作業を行うオペレータに、移動体の遠隔監視または遠隔操作のために必要な情報を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
住友電気工業株式会社
充電システム
11日前
住友電気工業株式会社
高周波用電線
12日前
住友電気工業株式会社
電線物理量測定装置
11日前
住友電気工業株式会社
光コネクタケーブル
11日前
住友電気工業株式会社
コンタクタ治具および検査治具
3日前
住友電気工業株式会社
方法、超電導線材、および制御システム
6日前
住友電気工業株式会社
半導体光素子、および半導体光素子の製造方法
11日前
住友電気工業株式会社
樹脂組成物、電線、樹脂組成物の製造方法、および電線の製造方法
3日前
住友電気工業株式会社
積層材の検査方法、積層材の製造方法、および積層材の検査システム
11日前
株式会社オートネットワーク技術研究所
コネクタ
11日前
株式会社オートネットワーク技術研究所
車載装置
11日前
株式会社オートネットワーク技術研究所
接続構造体
11日前
株式会社オートネットワーク技術研究所
コネクタ装置
11日前
株式会社オートネットワーク技術研究所
コネクタ装置
11日前
株式会社オートネットワーク技術研究所
車載用制御装置
4日前
株式会社オートネットワーク技術研究所
コネクタのガイド構造
11日前
住友電工オプティフロンティア株式会社
光コネクタおよび光コネクタの取り付け方法
10日前
株式会社オートネットワーク技術研究所
機器モジュールの取付構造
12日前
株式会社オートネットワーク技術研究所
筐体、および車両用充電装置
10日前
株式会社オートネットワーク技術研究所
端子材料および電気接続端子
6日前
株式会社オートネットワーク技術研究所
端子材料および電気接続端子
6日前
株式会社オートネットワーク技術研究所
端子材料および電気接続端子
10日前
株式会社オートネットワーク技術研究所
ワイヤハーネス、及び接続構造体
11日前
株式会社オートネットワーク技術研究所
端子金具、実装基板及び基板装置
5日前
株式会社オートネットワーク技術研究所
金属部材および金属部材の製造方法
10日前
株式会社オートネットワーク技術研究所
電気接続箱、及び電気接続箱の製造方法
5日前
株式会社オートネットワーク技術研究所
車載装置、情報処理方法及びプログラム
12日前
住友電気工業株式会社
出力制御ユニット、電力変換装置、電力変換システム、電池残量管理方法およびコンピュータプログラム
3日前
株式会社オートネットワーク技術研究所
機器モジュールの取付構造及び機器モジュール
12日前
株式会社オートネットワーク技術研究所
電線導体、絶縁電線、およびワイヤーハーネス
10日前
株式会社オートネットワーク技術研究所
車載更新システム、車載装置、及び車載ECU
6日前
株式会社オートネットワーク技術研究所
クランプ、ワイヤハーネス及びクランプセット
3日前
株式会社オートネットワーク技術研究所
ワイヤハーネス
3日前
株式会社オートネットワーク技術研究所
シールド導電路
5日前
株式会社オートネットワーク技術研究所
ワイヤハーネス
3日前
日本精機株式会社
警報システム
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ