TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141920
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2025039845
出願日
2025-03-13
発明の名称
単一のロボットのワイヤハーネスの張力トラッキング
出願人
ファナック株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250919BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットを用いて、構造体に取付けられた複数の固定具にケーブルをルーティングして固定するための方法及びシステムの提供。
【解決手段】方法は、ケーブルを把持することと、ケーブルを捻り、ケーブルに張力を付与することと、ケーブルに張力がかかっている間、捻られたケーブルに沿ってグリッパをスライドさせることと、学習ベースのアルゴリズムを用いて、非線形のケーブルダイナミクスモデルを生成することと、ケーブルダイナミクスモデルを用いて、ロボット動作指令信号を生成することと、ロボット動作指令信号、並びにロボットのポーズ及び力の測定値を用いてロボットの動作を制御し、ケーブルを複数の固定具にルーティングして固定することと、を含む。
【選択図】図2
特許請求の範囲
【請求項1】
ケーブルグリッパ及びカメラを備え、動作制御装置によって制御されているロボットを用いて、構造体に取付けられた複数の固定具にケーブルをルーティングして固定するための方法であって、
固定された終点にケーブルの端部を接続することと、
前記ロボットに対する前記固定具の位置及びポーズをマッピングすることと、
前記カメラを用いて前記ケーブルの画像を取得することと、
前記グリッパ、及び前記終点の近傍の画像を用いて、前記ケーブルを把持することと、
前記グリッパを用いて前記ケーブルを捻り、前記グリッパと前記固定された終点との間で前記ケーブルに張力を付与することと、
前記ケーブルに張力がかかっている間、捻られた前記ケーブルに沿って前記グリッパを、前記固定された終点から離れかつ目標固定具に向かうようにスライドさせることと、
学習ベースのアルゴリズムを用いて、非線形のケーブルダイナミクスモデルを生成することと、
前記ケーブルダイナミクスモデルを用いて、ロボット動作指令信号を生成することと、
前記ロボット動作指令信号、並びにロボットのポーズ及び力の測定値を用いて前記ロボットの動作を制御し、前記ケーブルを前記目標固定具にルーティングして固定することと、
前記ケーブルが前記目標固定具に接続された後に、前記ケーブルの次の固定具へのルーティングに切替えることと、
を含む、方法。
続きを表示(約 950 文字)
【請求項2】
前記ケーブルが前記複数の固定具の全てに固定されるまで、前記ケーブルを各固定具に対して同じやり方で逐次的にルーティングして固定することをさらに含む、請求項1に記載の方法。
【請求項3】
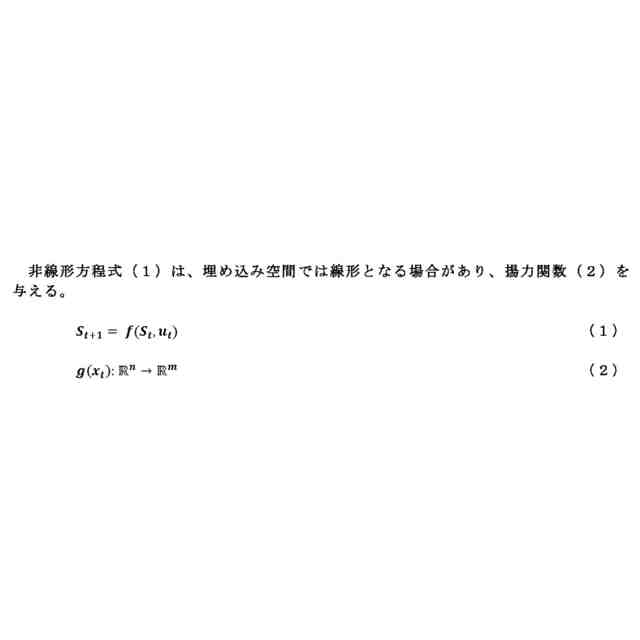
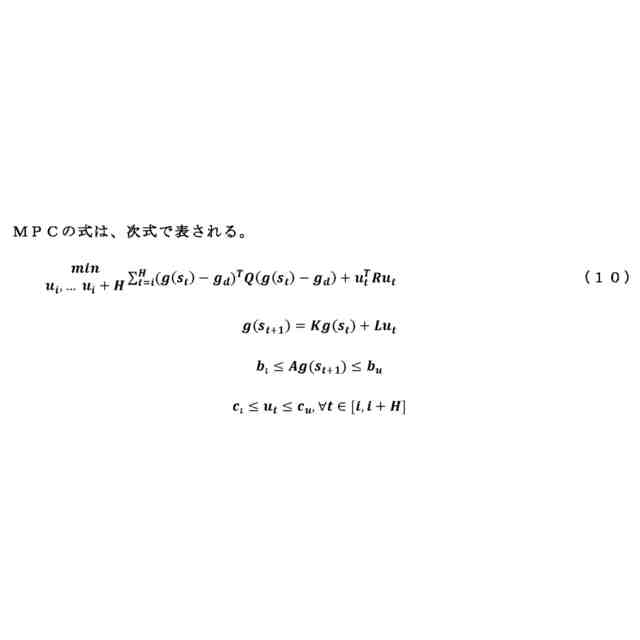
ロボット動作指令信号を生成することは、モデル予測制御(MPC)アルゴリズムを使用することを含む、請求項1に記載の方法。
【請求項4】
学習ベースのアルゴリズムを使用して非線形のケーブルダイナミクスモデルを生成することは、前記ケーブルのダイナミクスを、前記学習ベースのアルゴリズムに適合したKoopman演算子モデルとしてモデリングすることを含む、請求項1に記載の方法。
【請求項5】
前記ケーブルの張力を維持しながら前記ケーブルを前記固定具内に挿入するアセンブリプリミティブと、データを収集するケーブルプリミティブとを含む2つのプリミティブ動作を求めることをさらに含む、請求項1に記載の方法。
【請求項6】
前記グリッパ及び前記画像を用いて前記ケーブルを把持することは、前記画像に基づいて前記ケーブルの目標ポーズを求め、前記ロボットに目標ポーズ信号を送り、ロボットポーズ信号をロボット制御装置からルーティングコンピュータに送ることを含む、請求項1に記載の方法。
【請求項7】
前記固定具の位置及びポーズをマッピングすることは、視覚センサを使用することを含む、請求項1に記載の方法。
【請求項8】
前記固定具の位置及びポーズをマッピングすることは、前記固定具の各々にウェイポイントを割り当てるウェイポイント計画を含む、請求項1に記載の方法。
【請求項9】
前記固定具は、C字形固定具及びU字形固定具を含み、前記C字形固定具にはあるタイプのウェイポイントが割り当てられ、前記U字形固定具には別のウェイポイントが割り当てられる、請求項8に記載の方法。
【請求項10】
前記力の測定値は、前記ロボットの関節トルクセンサ又は力センサを使用して、前記ケーブルを捻ることで生じる張力を測定することによって得られる、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
(関連出願の相互参照)
本願は、2024年3月14日に提出された、タイトルを「Tension-Tracking For Single Robot Wire Harnessing」とする米国仮出願第63/565196号の優先権の利益を主張するものである。
続きを表示(約 1,900 文字)
【0002】
本開示は、広くは、ケーブルを操作するためのロボットシステムに関し、特には、ケーブル張力フィードバックを用いて単一のロボットを使用する、ワイヤ又はケーブルを種々の固定具に、さらに種々の固定具を通してルーティングするためのロボットシステムに関する。
【背景技術】
【0003】
自動車、航空宇宙、医療、電気通信等のような種々の産業では、種々の電気装置及びシステムに信号及び電力を供給するために多くのワイヤ、ケーブル及びワイヤハーネスを使用することが頻繁に求められる。自動車産業では、ワイヤハーネスは、センサ、電子制御ユニット、バッテリ、アクチュエータ等の車両内の電気・電子部品を接続する電気ケーブル又はワイヤの集合体であり得る。ワイヤハーネスは、電力及び情報をルーティングして、ステアリング及びブレーキのような一次的な車両機能、並びに換気及びインフォテインメントのような二次的な車両機能を提供する。これらのワイヤハーネスは、車両全体に配線され、車両の製造時に固定具に結合される必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
現代の車両製造は高度に自動化されており、しばしばロボットを使用してワイヤハーネスを固定具にルーティングして接続する。ワイヤハーネスをルーティングするためにロボットを使用することにより、ワイヤ及びケーブルが無限の自由度を有することによる運動学的ベースの課題、ワイヤ及びケーブルが接触によって変形可能であることによる動的ベースの課題、並びに、ワイヤ及びケーブルが細く長いことによる視覚ベースの課題等、多くの課題が創出される。ロボットを使用してケーブル及びワイヤハーネスを車両全体にルーティングするために、現在は2つの一般的な技術、すなわち、バイマニュアルロボットワイヤハーネス及び単一ロボットワイヤハーネスが、当技術分野に存在する。バイマニュアルロボットワイヤハーネスは、2つのロボットアームを使用してワイヤ及びケーブルを把持し、固定具内に配置する。しかし、この技術は高価であり、システム構造を複雑にする。単一ロボットワイヤハーネスは、ワイヤのポーズ及び把持/せん断力を検出するために、ロボットの指先に触覚センサを必要とする。しかし、このような触覚センサは高価で壊れやすい。故に、改善の余地がある。
【課題を解決するための手段】
【0005】
以下の議論は、ワイヤ又はケーブルを種々の固定具に対し、また種々の固定具を通してルーティングするためのロボットシステムを開示し、説明する。このシステムは、ケーブル張力フィードバックを用いる単一のロボットを使用する。ロボットシステムは、ケーブルの端部を固定された終点に接続することと、ロボットに対する固定具の位置及びポーズをマッピングすることと、カメラを用いてケーブルの画像を取得することとを含むプロセスを採用する。またこのプロセスは、ロボットのグリッパ及び固定された終点近傍の画像を用いてケーブルを把持することと、グリッパと固定された終点との間でケーブルに張力がかかるようにグリッパを用いてケーブルを捻ることと、ケーブルに張力がかかっている間、捻られたケーブルに沿ってグリッパを、固定された終点から離れかつ目標固定具に向かうようにスライドさせることとを含む。このプロセスは、学習ベースのアルゴリズムを使用して非線形ケーブルダイナミクスモデルを生成し、ケーブルダイナミクスモデルを使用してロボット動作指令信号を生成し、ロボット動作指令信号、並びにロボットのポーズ及び力の測定値を用いてロボットの動作を制御し、ケーブルを目標固定具にルーティングして固定する。
【0006】
本開示の追加の特徴は、添付の図面と併せて、以下の説明及び特許請求の範囲から明らかになるであろう。
【図面の簡単な説明】
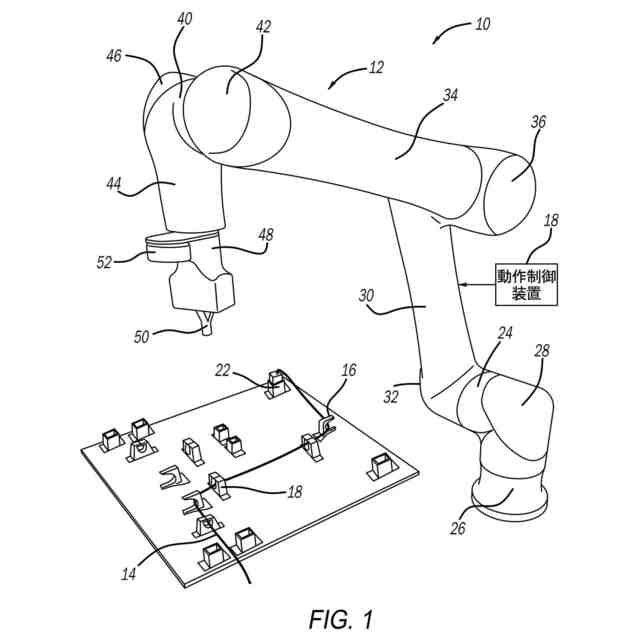
【0007】
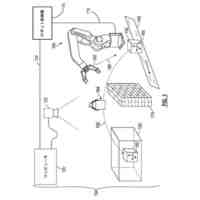
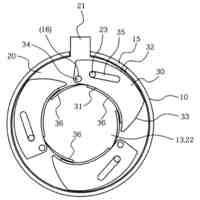
ケーブルを支持固定具に、および支持固定具を介してルーティングするためのロボットを含むロボットシステムの等角図である。
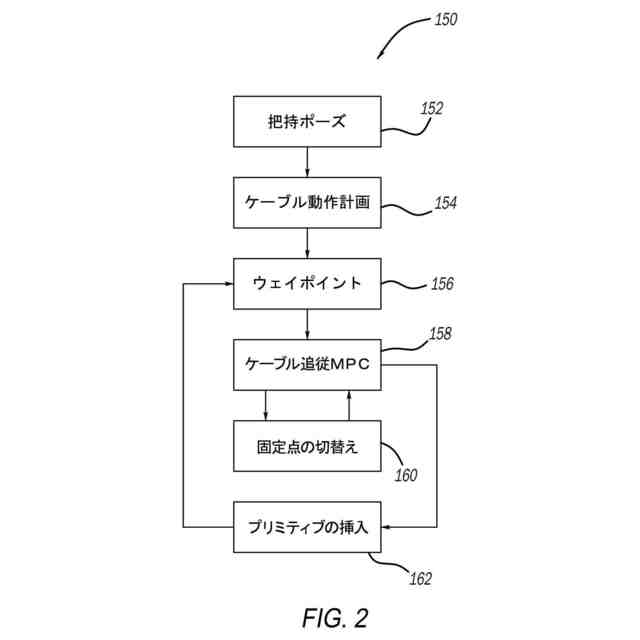
【0008】
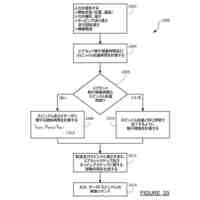
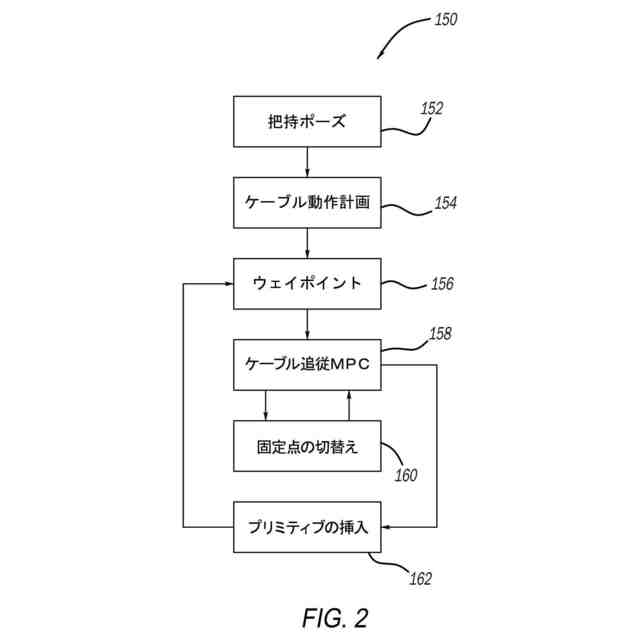
ケーブルを一連の固定具にルーティングし、接続するための方法のフロー図である。
【0009】
力フィードバックを有する単一ロボットワイヤハーネスマニピュレータシステムの一般的なブロック図である。
【0010】
ケーブルを把持するためのロボット視覚認識を含むロボットシステムのブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ファナック株式会社
迅速な移動のタッピング方法
1日前
ファナック株式会社
単一のロボットのワイヤハーネスの張力トラッキング
1日前
ファナック株式会社
オンラインロボット動作計画のフレームワーク
11日前
個人
固定補助具
1か月前
個人
折りたたみ工具
22日前
株式会社三協システム
製函機
20日前
株式会社三協システム
移載装置
19日前
CKD株式会社
把持装置
21日前
株式会社不二越
ロボット操作装置
27日前
株式会社不二越
ロボットシステム
1か月前
株式会社ミクロブ
把持装置
21日前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
22日前
SMC株式会社
着脱装置
20日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
移動ロボットシステム
1日前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
エッジ仕上げ装置
11日前
株式会社不二越
ロボットシステム
22日前
本田技研工業株式会社
装置
4日前
株式会社不二越
ロボットシステム
19日前
トヨタ自動車株式会社
歩行ロボット
25日前
積水ハウス株式会社
フィルム除去具
1か月前
株式会社不二越
垂直多関節ロボット
12日前
大和ハウス工業株式会社
ねじ回転工具
20日前
シンフォニアテクノロジー株式会社
搬送装置
1日前
ライオン株式会社
移載システム
13日前
ダイハツ工業株式会社
移載治具
1か月前
株式会社不二越
協働ロボットシステム
2か月前
株式会社不二越
ロボットシステム
1か月前
株式会社清水製作所
電動工具の吊下げ具
2か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
11日前
セイコーエプソン株式会社
ロボット
20日前
シヤチハタ株式会社
マーキング装置
25日前
シヤチハタ株式会社
マーキング装置
25日前
セイコーエプソン株式会社
ロボット
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ